Yolov5+dnn+卡尔曼滤波(Kalman)实现目标跟踪及预测
环境配置
1.ubuntu20
2.opencv+opencv_contrib
场景应用及流程说明
在导航、检测短暂丢失目标时,利用kalman算法对目标移动轨迹做一个简单的预测。
通常目标跟踪是由检测器+跟踪器作为基本配置,目前常用的检测器通常为yolo系列或者faster rcnn等通用目标检测器。跟踪器用的比较多的是deepsort。但是deepsort实验时,分配ID比较乱,这次采用kalman。
配置yolov5的dnn模块
本篇参考我的其他博客
配置opencv
yolov5 dnn模块部署
代码说明
self.net = cv2.dnn.readNet(yolo_type + '.onnx')
self.net.setPreferableBackend(cv2.dnn.DNN_BACKEND_CUDA)
self.net.setPreferableTarget(cv2.dnn.DNN_TARGET_CUDA)
dnn模块进行cuda加速
#初始化yolo模型
yolonet = yolov5(args.net_type, confThreshold=args.confThreshold, nmsThreshold=args.nmsThreshold, objThreshold=args.objThreshold)
# Load Kalman filter to predict the trajectory
kf = KalmanFilter()
初始化yolov5模型,以及加载kalman滤波算法
#cap = cv2.VideoCapture(0) # 读取摄像头
cap = cv2.VideoCapture("test2.mp4") #读取视频文件
while(True):
ret, frame = cap.read()
if ret is False:
break
if ret:
dets = yolonet.detect(frame)
frame,box_center = yolonet.postprocess(frame, dets)
#cv2.imwrite("yolo1111.jpg",frame)
读取图像以及利用opencv的dnn模块进行yolov5目标检测,返回检测结果的中心位置。
for box in box_center:
cx = int(box[0])
cy = int(box[1])
predicted = kf.predict(cx, cy)
#cv2.rectangle(frame, (x, y), (x2, y2), (255, 0, 0), 4)
cv2.circle(frame, (cx, cy), 20, (0, 0, 255), 4)
#cv2.circle(frame, (predicted[0], predicted[1]), 20, (255, 0, 0), 4)
for i in range(3):
predicted = kf.predict(predicted[0], predicted[1])
cv2.circle(frame, predicted, 10, (255, 0, 0), 4)
将结果送入kalman滤波器,并进行预测,本次代码中进行了三次预测。
达到效果
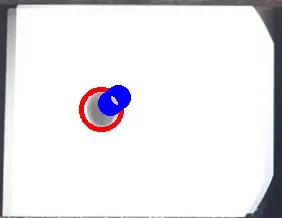
整个目标以类似的抛物线向上移动,红色圆圈是检测目标的中心,三个蓝色圆圈是三个预测的结果。
完整代码:https://download.csdn.net/download/weixin_41868104/84979158
文章出处登录后可见!
已经登录?立即刷新