1.仿真预览
2.理论分析
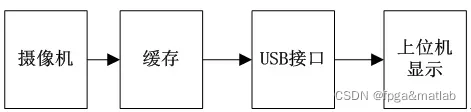
标准硬件系统图像显示流程如下:
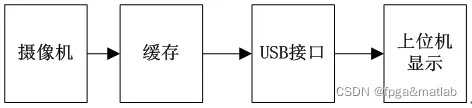
但是在仿真阶段,为了验证USB的功能,我们需要对系统的工作模式做下调整,使得符合仿真使用。具体如下所示:

注意,由于摄像机,在仿真阶段,没法获得实际的图片,我们这里通过摄像机驱动,驱动我们的存储器中的图片输出图像。然后将图像数据通过USB进行输出,并在modelsim仿真过程中,将仿真数据保存,然后用matlab对仿真数据进行解析,得到图像,从而验证USB接口的正确性。
然后配置上,还包括 CY7C68013 芯片的配置两个部分。
注意,由于我们将测试图片,做到 FPGA 的缓存中用于仿真了,实际下载硬件这个环节是没有的,所以这个做法会导致资源不够,所以再编译的时候按点如下安健:
(所以,我们这里采用图片大小是 600*800 的,原始相机 3000 多扫描, FPGA 仿真会非常非常非常非常非常慢,所以这里用较小的图片,然后后面提供的 matlab 成像软件,还是按照扫描模式来成像的。)

也就是第二个安全,这个安全是一个综合过程,只用于模拟,
第一个安全是下载硬件的安全。既然设置了缓存,肯定会出现资源不足的情况,所以没必要点这个安全。
下面介绍USB接口的定义:
1.USB时钟,
2.复位信号,
3.图像数据输入到USB接口,这个接口要加入FIFO
4.USB中断信号输入
5.USB读写使能信号
6.USB输出到电脑的接口,外部接口,这个接口要加入FIFO
7.输入信号触发信号
————————————————– ————————————————–
运行QII12.1版本软件,
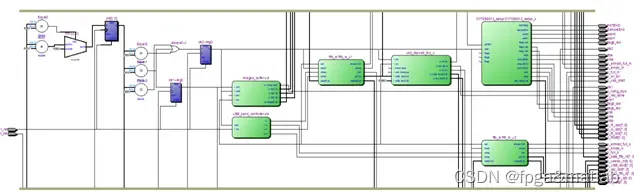
首先可以看到系统的RTL结构图
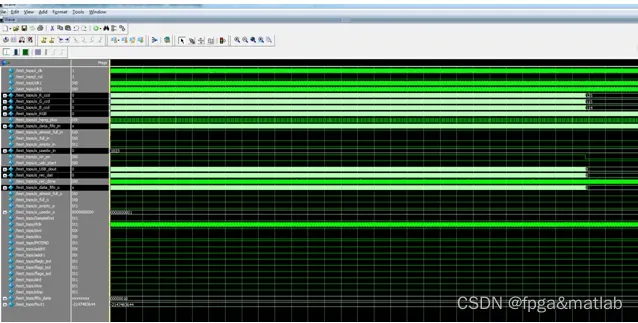
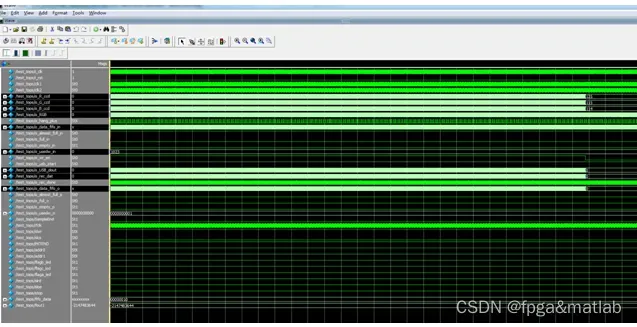
进行modelsim仿真,得到如下的仿真结果:
模拟完成后会生成 ,这个文件在
,这个文件在
打开这个文件,将前面多个xx删除,然后复制到matlab文件夹
然后用matlab软件进行数据还原
双击读取数据,然后点击显示图片,得到如下结果:
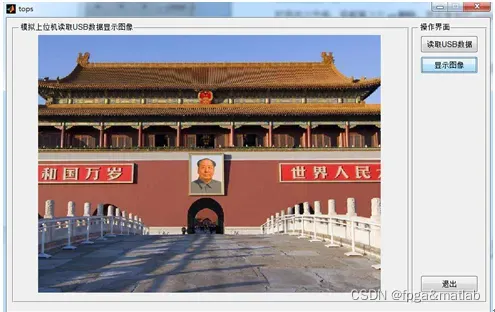
说明USB数据接口成功。
3.部分核心代码
`timescale 1ns / 10ps
module tops(
i_clk,
i_rst,
clk1,
clk2,
o_R_ccd,
o_G_ccd,
o_B_ccd,
o_RGB,
o_hang_plus,
//usb fifo in
o_data_fifo_in,
o_almost_full_in,
o_full_in,
o_empty_in,
o_usedw_in,
//USB output
o_wr_en,
o_usb_start,
o_USB_dout,
o_rec_dat,
o_rec_done,
//usb fifo out
o_data_fifo_o,
o_almost_full_o,
o_full_o,
o_empty_o,
o_usedw_o,
SampleEnd,
ifclk,
slwr,
slcs,
PKTEND,
addr0,
addr1,
flagb_led,
flagc_led,
flaga_led,
slrd,
sloe,
stop,
fifo_data
);
input i_clk;
input i_rst;
output clk1;
output clk2;
output[7:0]o_R_ccd;
output[7:0]o_G_ccd;
output[7:0]o_B_ccd;
output[7:0]o_RGB;
output o_hang_plus;
output[7:0]o_data_fifo_in;
output o_almost_full_in;
output o_full_in;
output o_empty_in;
output[9:0]o_usedw_in;
output o_wr_en;
output o_usb_start;
output[7:0]o_USB_dout;
output[7:0]o_rec_dat;
output o_rec_done;
output[7:0]o_data_fifo_o;
output o_almost_full_o;
output o_full_o;
output o_empty_o;
output[9:0]o_usedw_o;
output SampleEnd;
output ifclk;
output slwr;
output slcs;
output PKTEND;
output addr0;
output addr1;
output flagb_led;
output flagc_led;
output flaga_led;
output slrd;
output sloe;
output stop;
output[7:0] fifo_data;
//clk 3pider
//clk 3pider
//clk 3pider
//clk 3pider
//clk 3pider
//clk 3pider
//clk 3pider
//clk 3pider
reg[3:0]cnt;
reg clk1;
reg clk2;
always @(posedge i_clk or posedge i_rst)
begin
if(i_rst)
begin
cnt <= 4'd0;
clk1 <= 1'b0;
clk2 <= 1'b0;
end
else begin
if(cnt==4'd6)
cnt <= 4'd1;
else
cnt <= cnt + 4'd1;
if(cnt == 4'd1)
clk1 <= 1'b1;
else
clk1 <= 1'b0;
if(cnt == 4'd1 | cnt == 4'd3 | cnt == 4'd5 )
clk2 <= 1'b1;
else
clk2 <= 1'b0;
end
end
//Images buffer to define the CCD
//Images buffer to define the CCD
//Images buffer to define the CCD
//Images buffer to define the CCD
//Images buffer to define the CCD
//Images buffer to define the CCD
//Images buffer to define the CCD
//Images buffer to define the CCD
//Images buffer to define the CCD
images_buffer uut(
.i_clk1 (clk1),
.i_clk2 (clk2),
.i_rst (i_rst),
.i_ren (1'b1),
.o_R (o_R_ccd),
.o_G (o_G_ccd),
.o_B (o_B_ccd),
.o_image (o_RGB),
.o_hang_plus(o_hang_plus)//逐行输出扫描,hangplus为行信号,标注每一行的信息
);
//USB interface******************************************************************************************************
//USB interface******************************************************************************************************
//USB interface******************************************************************************************************
//USB interface******************************************************************************************************
//USB interface******************************************************************************************************
//USB interface******************************************************************************************************
//USB interface******************************************************************************************************
//USB interface******************************************************************************************************
//USB Controller
wire w_i;
wire r_i;
wire w_o;
wire r_o;
USB_send_controller ut4(
.clk2 (clk2),
.i_rst(i_rst),
.w_i (w_i),
.r_i (r_i),
.w_o (w_o),
.r_o (r_o)
);
//fifo input
fifo_io fifo_io_u1(
.aclr (i_rst),
.clock (clk2),
.data (o_RGB),
.rdreq (r_i),
.wrreq (w_i),
.almost_full(o_almost_full_in),
.empty (o_empty_in),
.full (o_full_in),
.q (o_data_fifo_in),
.usedw (o_usedw_in)
);
//usb interface
usb_top usb_top_u(
.i_clk (clk2),
.i_rst (i_rst),
//USB中断控制输入信号
.i_usb_interrupt (1'b0),
//USB发送数据控制指令
.i_trans_start (1'b1),
//usb输入
.i_USB_din (o_data_fifo_in),
//输入发送数据长度
.i_USB_len (8'd8),
//write输出
.o_wr_en (o_wr_en),
//read输出
.o_rd_en (o_usb_start),
//usb输出
.o_USB_dout (o_USB_dout),
//输出数据
.o_rec_dat (o_rec_dat),
//接收完成标志
.o_rec_done (o_rec_done)
);
//fifo output
fifo_io fifo_io_u2(
.aclr (i_rst),
.clock (clk2),
.data (o_USB_dout),
.rdreq (r_o),
.wrreq (w_o),
.almost_full(o_almost_full_o),
.empty (o_empty_o),
.full (o_full_o),
.q (o_data_fifo_o),
.usedw (o_usedw_o)
);
//CY7C68013驱动芯片的配置
wire SampleEnd;
wire ifclk;
wire slwr;
wire slcs;
wire PKTEND;
wire addr0;
wire addr1;
wire flagb_led;
wire flagc_led;
wire flaga_led;
wire slrd;
wire sloe;
wire stop;
wire[7:0] fifo_data;
CY7C68013_setup CY7C68013_setup_u
(
.START(o_usb_start) , // input START_sig
.flaga(1'b1) , // input flaga_sig
.flagb(1'b1) , // input flagb_sig
.flagc(1'b1) , // input flagc_sig
.clkin(clk2) , // input clkin_sig
.SampleEnd(SampleEnd) , // output SampleEnd_sig
.ifclk (ifclk) , // output ifclk_sig
.slwr (slwr) , // output slwr_sig
.slcs (slcs) , // output slcs_sig
.PKTEND (PKTEND) , // output PKTEND_sig
.addr0 (addr0) , // output addr0_sig
.addr1 (addr1) , // output addr1_sig
.flagb_led(flagb_led) , // output flagb_led_sig
.flagc_led(flagc_led) , // output flagc_led_sig
.flaga_led(flaga_led) , // output flaga_led_sig
.slrd (slrd) , // output slrd_sig
.sloe (sloe) , // output sloe_sig
.stop (stop) , // output stop_sig
.fifo_data(fifo_data) // output [7:0] fifo_data_sig
);
endmodule function varargout = tops(varargin)
gui_Singleton = 1;
gui_State = struct('gui_Name', mfilename, ...
'gui_Singleton', gui_Singleton, ...
'gui_OpeningFcn', @tops_OpeningFcn, ...
'gui_OutputFcn', @tops_OutputFcn, ...
'gui_LayoutFcn', [] , ...
'gui_Callback', []);
if nargin && ischar(varargin{1})
gui_State.gui_Callback = str2func(varargin{1});
end
if nargout
[varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:});
else
gui_mainfcn(gui_State, varargin{:});
end
% End initialization code - DO NOT EDIT
% --- Executes just before tops is made visible.
function tops_OpeningFcn(hObject, eventdata, handles, varargin)
% This function has no output args, see OutputFcn.
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% varargin command line arguments to tops (see VARARGIN)
% Choose default command line output for tops
handles.output = hObject;
% Update handles structure
guidata(hObject, handles);
% UIWAIT makes tops wait for user response (see UIRESUME)
% uiwait(handles.figure1);
% --- Outputs from this function are returned to the command line.
function varargout = tops_OutputFcn(hObject, eventdata, handles)
% varargout cell array for returning output args (see VARARGOUT);
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Get default command line output from handles structure
varargout{1} = handles.output;
% --- Executes on button press in pushbutton1.
function pushbutton1_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton1 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
global R1;
global G1;
global B1;
global I;
load data.txt
Len= 158;
R1 = [zeros(Len,1);data(2:3:2+3*480000-1-3*Len)];
G1 = [zeros(Len,1);data(3:3:3+3*480000-1-3*Len)];
B1 = [zeros(Len,1);data(4:3:4+3*480000-1-3*Len)];
I(:,:,1) = [reshape(R1',[800,600])]';%一共产生600个行信息,扫描成像,我将扫描的效果给你放慢做出来了
I(:,:,2) = [reshape(G1',[800,600])]';
I(:,:,3) = [reshape(B1',[800,600])]';
msgbox('读取完毕');
% --- Executes on button press in pushbutton2.
function pushbutton2_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton2 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
global R1;
global G1;
global B1;
global I;
axes(handles.axes1);
I2 = zeros(size(I));
KK=15;
for i = 1:600/KK
I2(KK*(i-1)+1:KK*i,:,1) = I(KK*(i-1)+1:KK*i,:,1);
I2(KK*(i-1)+1:KK*i,:,2) = I(KK*(i-1)+1:KK*i,:,2);
I2(KK*(i-1)+1:KK*i,:,3) = I(KK*(i-1)+1:KK*i,:,3);
imshow(uint8(I2));
hold off
drawnow;
end
% --- Executes on button press in pushbutton3.
function pushbutton3_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton3 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
clc;
clear;
close all;
A38-08
文章出处登录后可见!