一、简介
本文前半部分算法实现参考的为姚健康老师的论文,这篇论文在万方学术平台可以免费下载:http://d.g.wanfangdata.com.cn/Periodical_jxkx200701002.aspx
后半部分算法涉及到稀疏优化,我在之前的博客中介绍了实现原理并给出了代码,链接如下:稀疏优化L1范数最小化问题求解之基追踪准则(Basis Pursuit)——原理及其Python实现
2. 问题的重述
给定一个超定线性方程组:
其中,找到
,这样
即求超定线性方程组在
范数意义下的解,简称
范数极小化问题1。
定义:设为问题
的解,称
为问题
的最小
模残差向量。如果能够得到最小的
-模残差向量
,则一致线性方程组
的解就是问题
的解。
2.求最小模残差向量的性质和方法
依据文献2中的说明,我们得到如下定理:
定理:设有 2 个超定线性方程组,若存在可逆阵
,使
,则这 2 个超定线性方程组的极小
模剩余向量相同。
令(
为
阶可逆矩阵),则方程
可转化为公式
:
假设方程组的最小
模残差向量为
,则由上式
和方程组
具有相同的最小
模残差向量,所以
也是式
的最小
模残差向量,记为
,所以
如果我们订购
那么最小模残差向量
满足以下线性方程:
在
具体转换过程可以参考姚老师的论文。因此,需要最小的模残差向量
,即需要满足公式
的
,使得
最小。
3.一种基于基追踪准则的求解算法
从方程式。 ,原超定线性方程组
的最小
模残差向量可以通过以下约束不可微优化问题得到:
表示问题的最优解
,方程组
是原方程的一致线性方程组,其解
是问题
的解:
在问题中,如果我们定义
:
那么问题变成如下问题:
对于极小模剩余向量
,考虑到我们的求解应当尽可能逼近精确解,即极小
模剩余向量
中的元素应当尽可能为0。这样问题
的形式又回到了
范数最小化问题中的稀疏优化问题。
参考我的这篇博客求解上述稀疏优化问题:稀疏优化L1范数最小化问题求解之基追踪准则(Basis Pursuit)——原理及其Python实现
四、超定线性方程组极小 范数求解Python代码
范数求解Python代码
采用 Python 中scipy模块内置的linprog函数求解线性方程组,编写代码如下:
import numpy as np
from scipy import optimize as op
def OLE_linprog(A, b):
'''
Ax = b (Given A & b, try to derive x)
Parameters
----------
A : matrix like.
b : array like.
Returns
-------
x : array
Minimal L1 norm solution of the system of equations.
Reference
---------
YAO Jian-kang. An Algorithm for Minimizing l1-Norm to Overdetermined Linear Eguations[J].
JIANGXI SCE7NICE, 2007, 25(1): 1-4.(Available at:
http://d.g.wanfangdata.com.cn/Periodical_jxkx200701002.aspx)
Version: 1.0 writen by z.q.feng @2022.03.13
'''
A, b = np.array(A), np.array(b)
if np.size(A, 0) < np.size(A, 1):
raise ValueError('Matrix A rows must greater than columns!')
m, n = A.shape
# Trans A into two matrix(n x n and (m - n) x n)
A1, A2 = A[:n, :], A[n:, :]
if np.linalg.matrix_rank(A) >= n:
# inverse of A1
A1_ = np.linalg.inv(A1)
else:
# Generalized inverse of A1
A1_ = np.linalg.pinv(A1)
# c_ij = A2 * A1_
c = np.dot(A2, A1_)
# r(n+1:m) = A2*inv(A1)*r(1:n) + d
d = np.dot(c, b[:n]) - b[n:]
# Basic-Pursuit, target function = sum(u, v)
t = np.ones([2 * m, 1])
# Aeq_ = [c I(m-n)]
Aeq_ = np.hstack([-c, np.eye(m - n, m - n)])
# Aeq[u v] = Aeq_ * (u - v)
Aeq = np.hstack([Aeq_, -Aeq_])
# u, v > 0
bounds = [(0, None) for i in range(2 * m)]
# r0 = [u; v]
r0 = op.linprog(t, A_eq = Aeq, b_eq = d, bounds = bounds,
method='revised simplex')['x']
# Minimal L1-norm residual vector, r = u - v
r = np.array([r0[:m] - r0[m:]])
# Solving compatible linear equations Ax = b + r
# Generalized inverse solution
x = np.linalg.pinv(A).dot(b + r.T)
return x
采用 MATLAB 求解的由于篇幅问题我就不放了,私信我。
五、检验检测
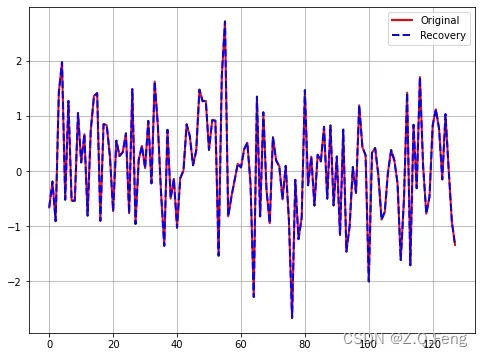
1. 矩阵A满秩情况
对于线性方程,通过生成给定的
和
,并制作
,我们可以认为
是问题
的最优解。然后我们用上面的函数求解得到它的经验解
,用
定义它的恢复残差,用plot来确定解的精度。
if __name__ == '__main__':
m, n = 256, 128
# 256x128矩阵,每个元素服从Gauss随机分布
A = np.random.randn(m, n)
# 128x1矩阵,每个元素服从Gauss随机分布
# b = A * u, 则 Au - b = 0,u 即为我们要求的精确解
u = np.random.randn(n, 1)
b = np.dot(A, u)
alpha = OLE_linprog(A, b)
# 恢复残差
print('\n恢复残差:', np.linalg.norm(alpha - u, 2))
# 绘图
plt.figure(figsize = (8, 6))
# 绘制原信号
plt.plot(u, 'r', linewidth = 2, label = 'Original')
# 绘制恢复信号
plt.plot(alpha, 'b--', linewidth = 2, label = 'Recovery')
plt.grid()
plt.legend()
plt.show()
得到恢复残差为6.0407e-14,恢复信号图如图所示(信号随机生成,每次结果均不一样)。
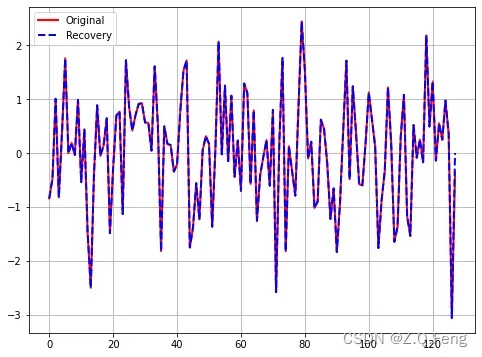
2. 矩阵A列缺秩情况
根据式可以看出,若矩阵
行不满秩,即
,我们的方法是不需要做对应改变的,而若矩阵
列缺秩,则需要使用矩阵
的Moore-Penrose逆矩阵
替代
在式
中构造
。
下面我们通过代码让矩阵列秩亏缺1:
A(:, n) = zeros(m, 1);
运行代码,得到恢复残差为0.2551,恢复信号图如图所示(信号随机生成,每次结果均不一样)。可以看到,虽然误差增大了,但是还在允许范围内。
6.总结
目前解决问题的方法很多,主要有:
- 线性规划方法;
- 投影下降法;
- 有效的设置方法;
- 区间法等
上述方法各有优缺点。比如线性规划法增加尺度,投影下降算法太复杂难以被工程技术人员掌握,有效集法比其他方法更直观,算法简单,区间法太复杂,并且没有最优解区间。检查难度更大。本文利用最小的模残差向量将问题
转化为有约束的不可微优化问题,进而求解出一致的线性方程组。该算法具有不扩大规模、简单易操作的优点。
(1): 1-3.http://d.g.wanfangdata.com.cn/Periodical_jxkx200701002.aspx.↩︎王嘉松,权日光。不相容线性方程组极小极大解的一种新算法[J]。1996: 04.↩︎
文章出处登录后可见!