小白学习视觉、笔记、拓展
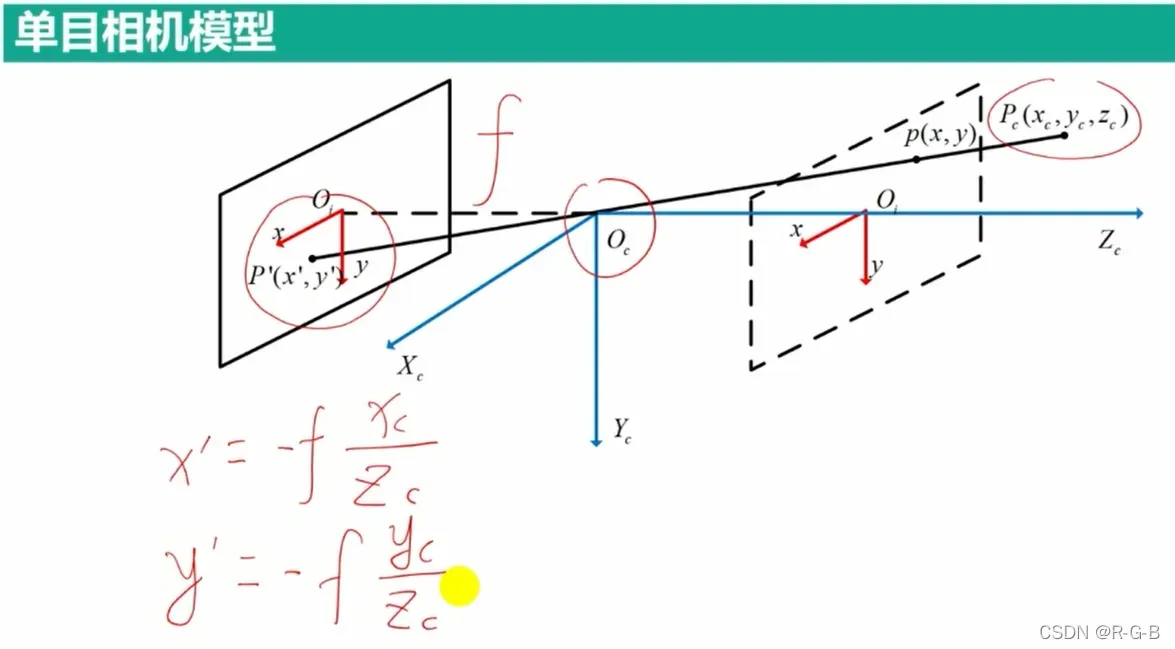
由于,x’,y’是负数,为了便于计算,将相机成像平面转放到物体同侧(光心与物体之间)
转换为齐次坐标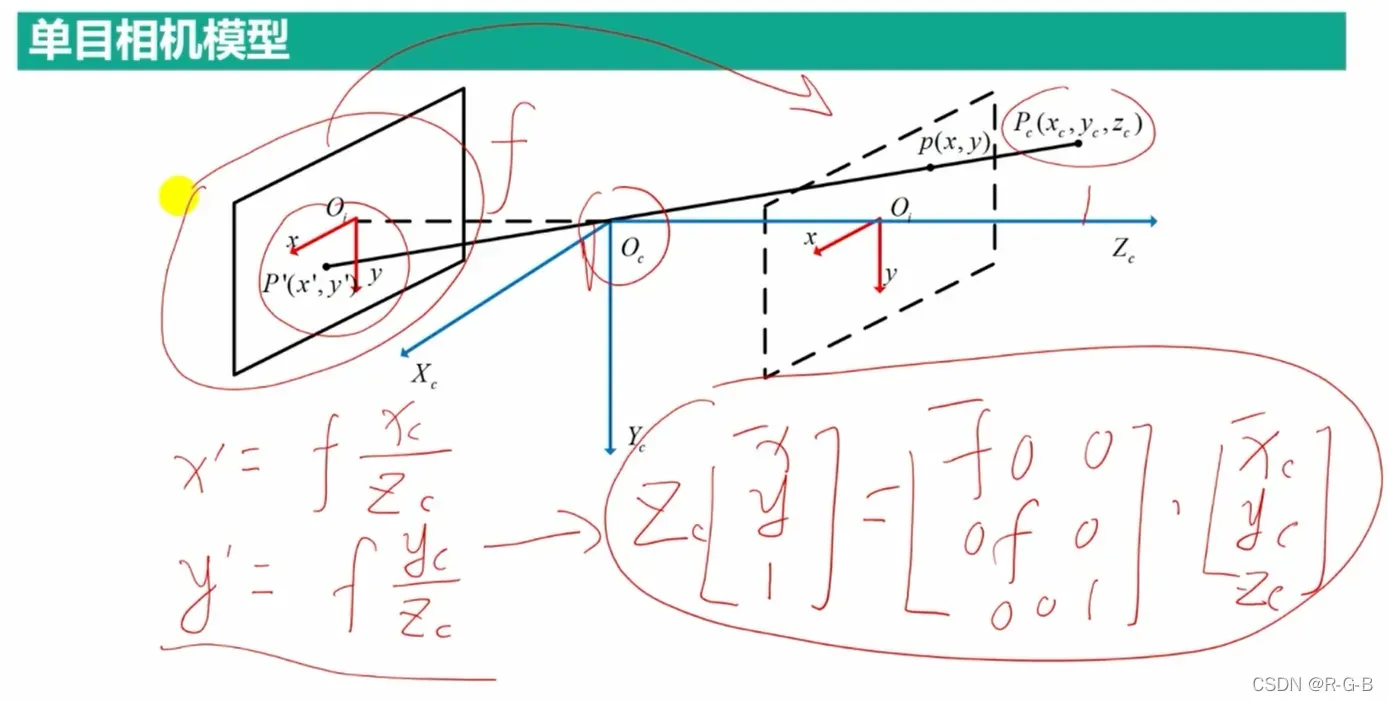
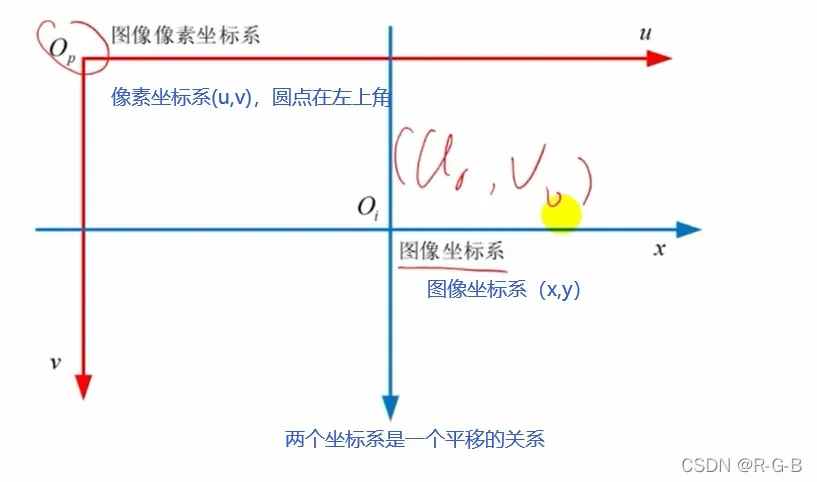
两个坐标系是平移关系
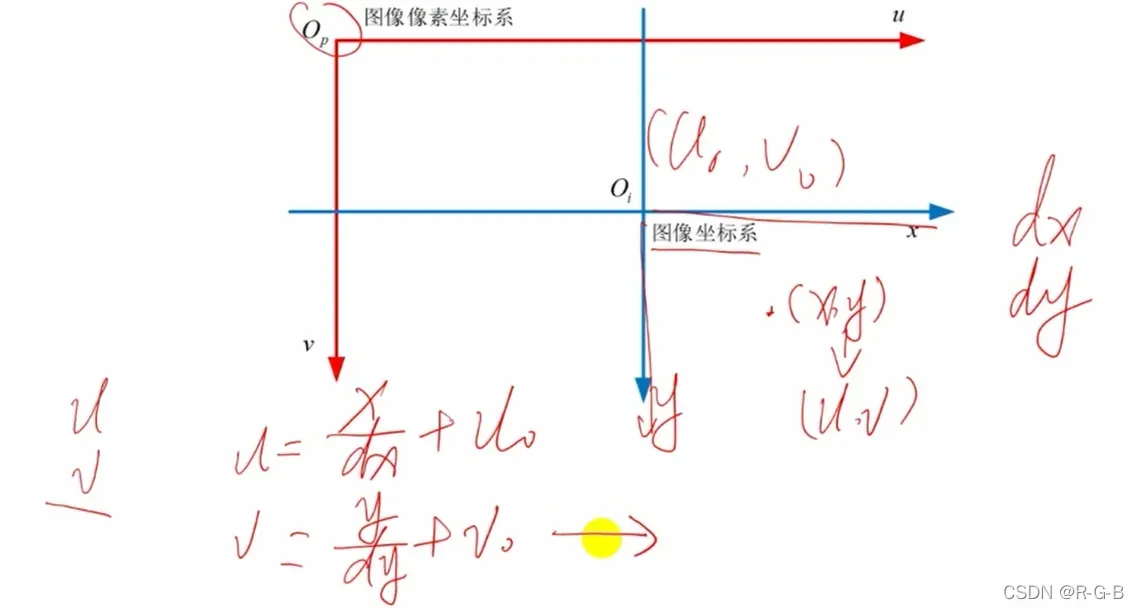
假设一个像素长度和高度对应实际长度的关系为dx,dy
将空间坐标(x,y)坐标转换为像素坐标
转换为齐次坐标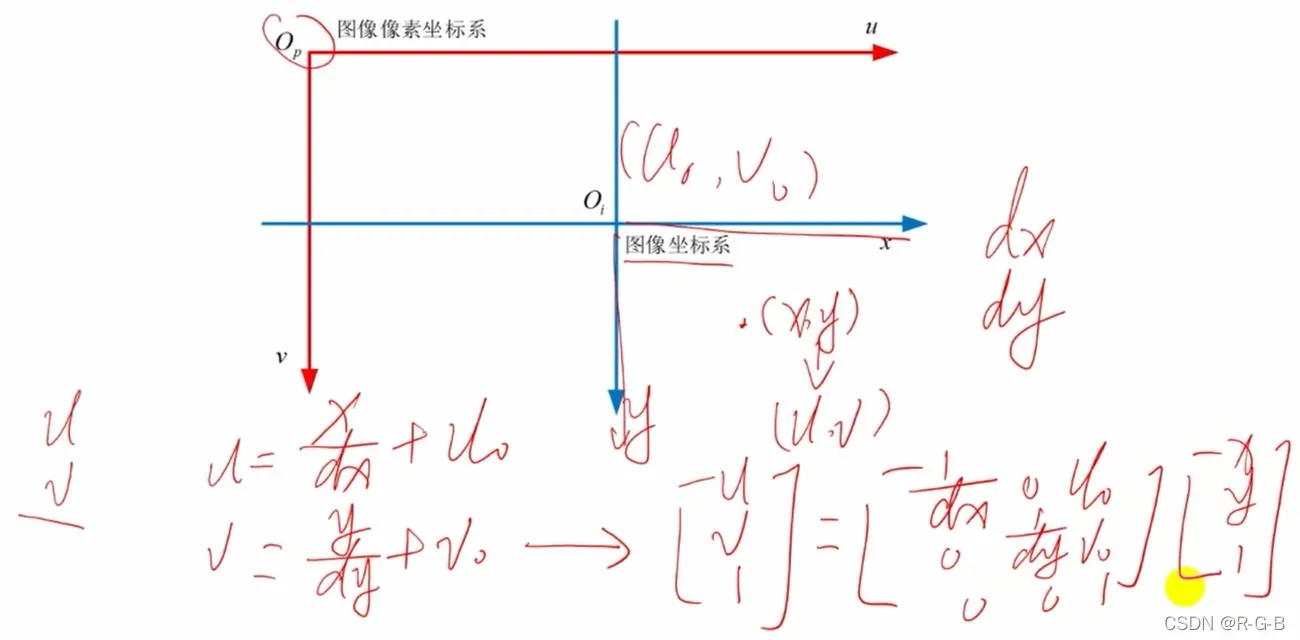
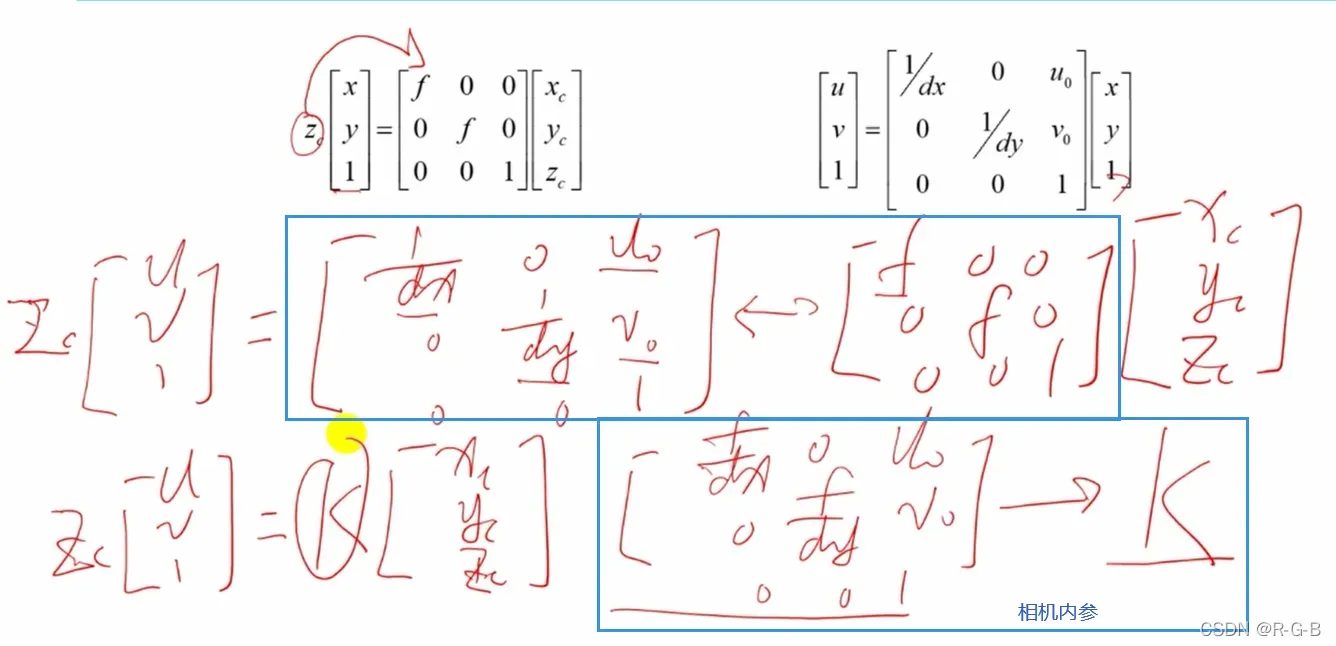
3D 空间映射到 2D 平面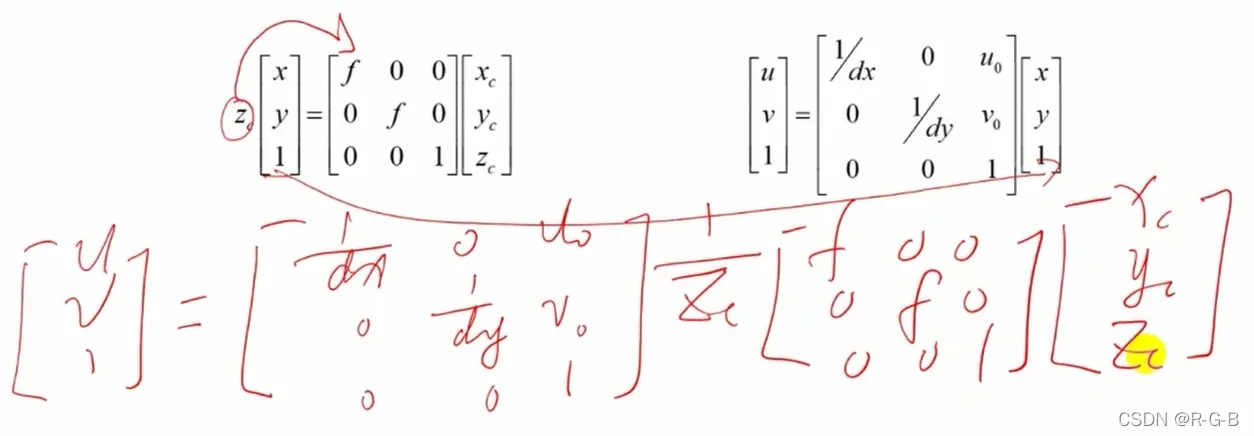

include <opencv2\opencv.hpp>
#include <iostream>
#include <vector>
using namespace std;
using namespace cv;
int main()
{
//输入计算得到的内参矩阵和畸变矩阵(相机商家会提供,但最好还是标定一遍)
Mat cameraMatrix = (Mat_<float>(3, 3) << 532.016297, 0, 332.172519,
0, 531.565159, 233.388075,
0, 0, 1);
Mat distCoeffs = (Mat_<float>(1, 5) << -0.285188, 0.080097, 0.001274,
-0.002415, 0.106579);
//前面已经计算好的
//代码清单10-10中计算的第一张图像相机坐标系与世界坐标系之间的关系
Mat rvec = (Mat_<float>(1, 3) << -1.977853, -2.002220, 0.130029);
Mat tvec = (Mat_<float>(1, 3) << -26.88155, -42.79936, 159.19703);
//生成第一张图像中内角点的三维世界坐标
Size boardSize = Size(9, 6);//标定板的内角点数目
Size squareSize = Size(10, 10); //棋盘格每个方格的真实尺寸
vector<Point3f> PointSets;
for (int j = 0; j < boardSize.height; j++)
{
for (int k = 0; k < boardSize.width; k++)
{
Point3f realPoint;
// 假设标定板为世界坐标系的z平面,即z=0
realPoint.x = j * squareSize.width;
realPoint.y = k * squareSize.height;
realPoint.z = 0;
PointSets.push_back(realPoint);
}
}
//根据三维坐标和相机与世界坐标系时间的关系估计内角点像素坐标
vector<Point2f> imagePoints;
projectPoints(PointSets, rvec, tvec, cameraMatrix, distCoeffs, imagePoints);
for (int i = 0; i < imagePoints.size(); i++)
{
cout << "第" << to_string(i) << "个点的坐标" << imagePoints[i] << endl;
}
waitKey(0);
return 0;
}
输出6*9=54个像素点
文章出处登录后可见!
已经登录?立即刷新