1. 功能概述
卡尺工具 主要有两个功能,一是检测边缘点的位置,二是检测边缘对之间的宽度。
2. 基本原理
- 指定需要查找边缘的矩形ROI区域
- 利用矩形ROI的四个顶点与对应的转正后矩形(搜索方向与水平轴平行)的四个顶点构建仿射变换关系,并利用该放射变换将矩形ROI区域内的图像转正
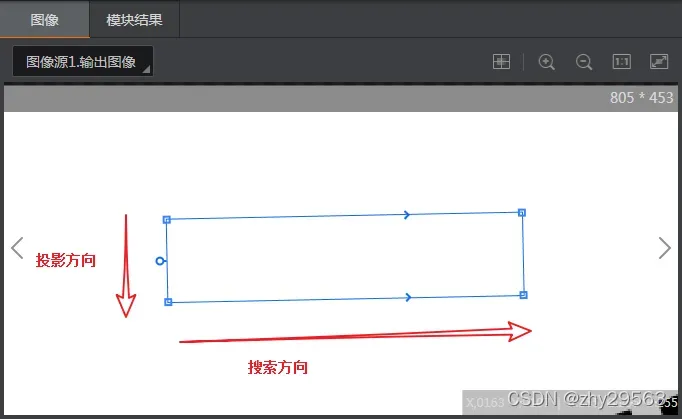
- 沿着投影方向将转正后的矩形ROI区域内的图像投影成单像素高度的水平像素带(一般是取每个位置处所有垂直方向像素的平均值)
- 对像素波段执行过滤操作
- 执行边缘提取
- 根据指定的边缘过滤方法过滤边缘
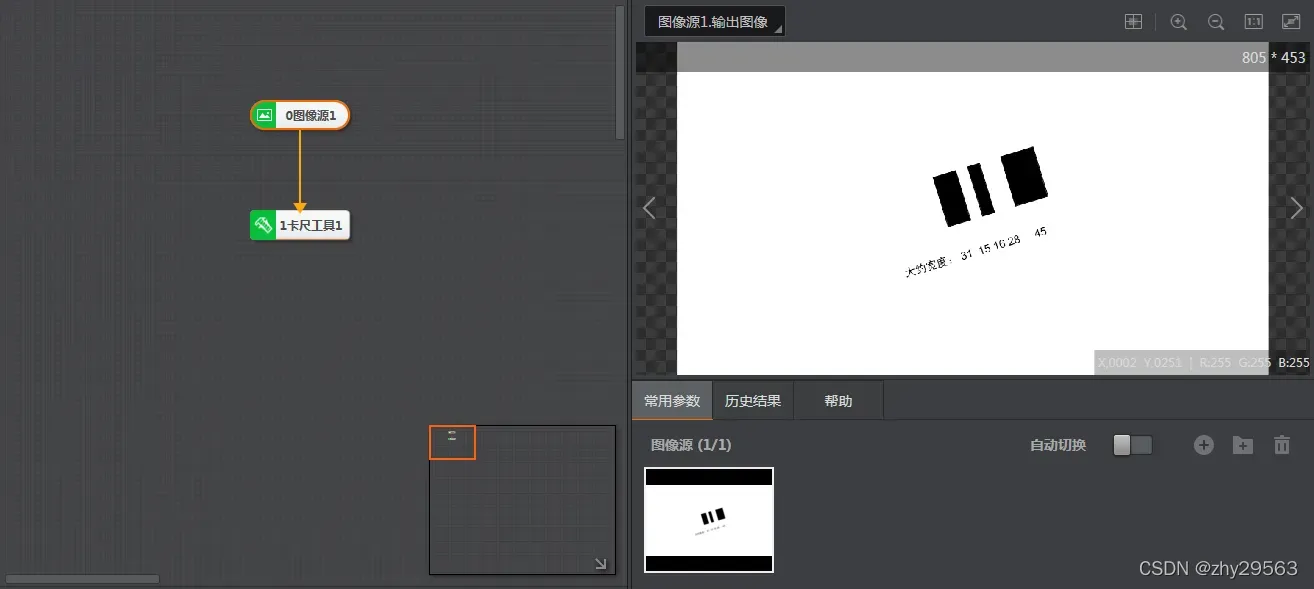
3. 方案配置
4. 单边缘
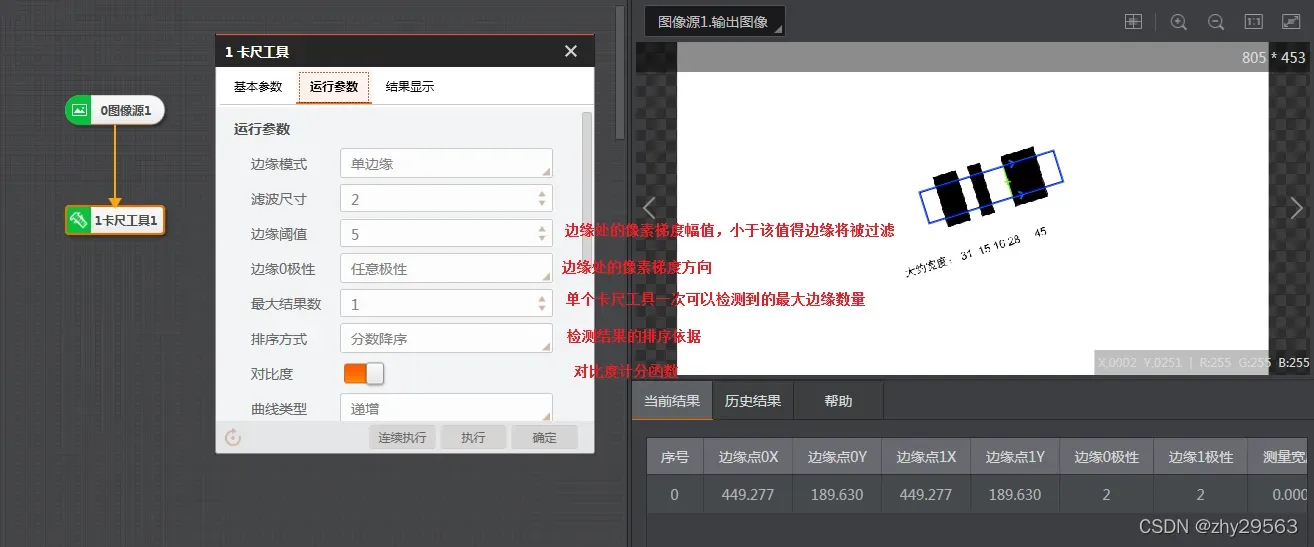
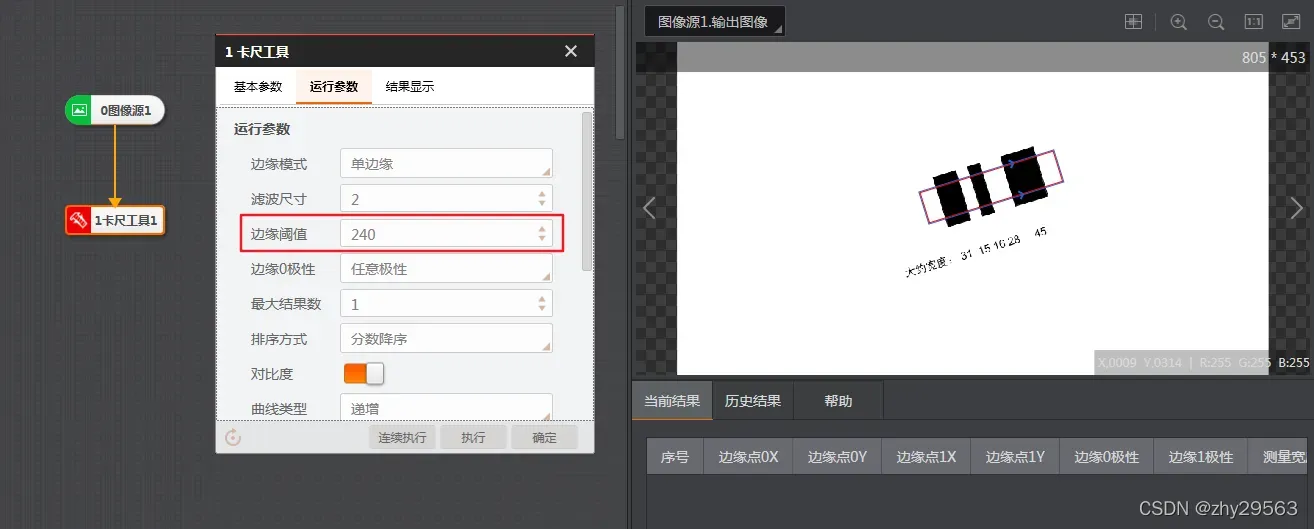
4.1 边缘阈值参数
- 当边缘阈值较小时,可以找到边缘
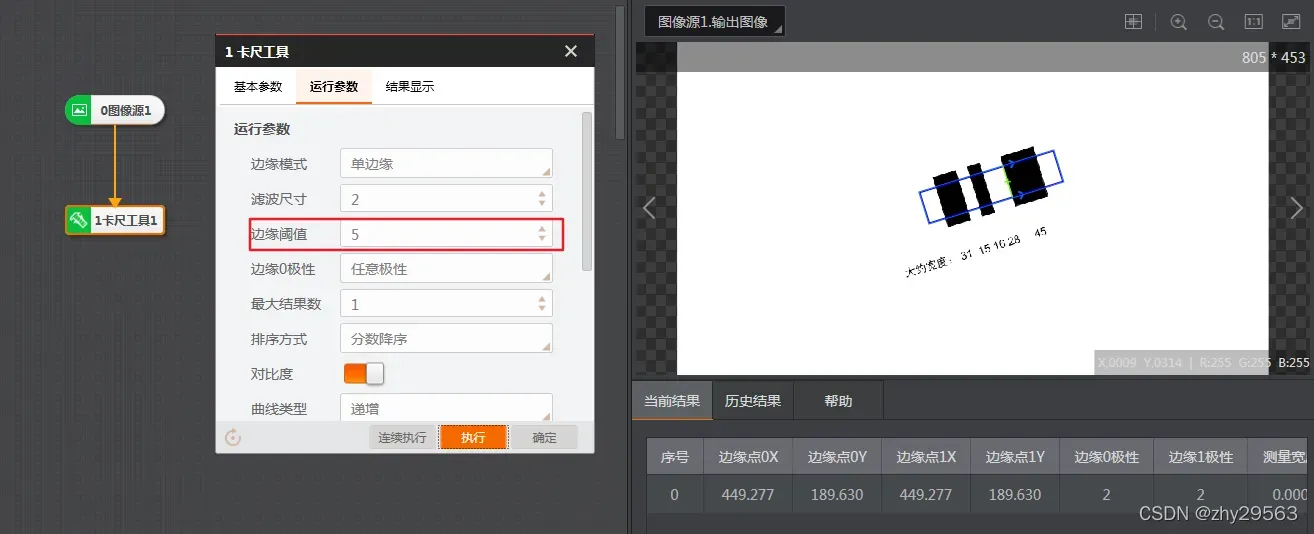
- 边缘阈值过大时,找不到边缘
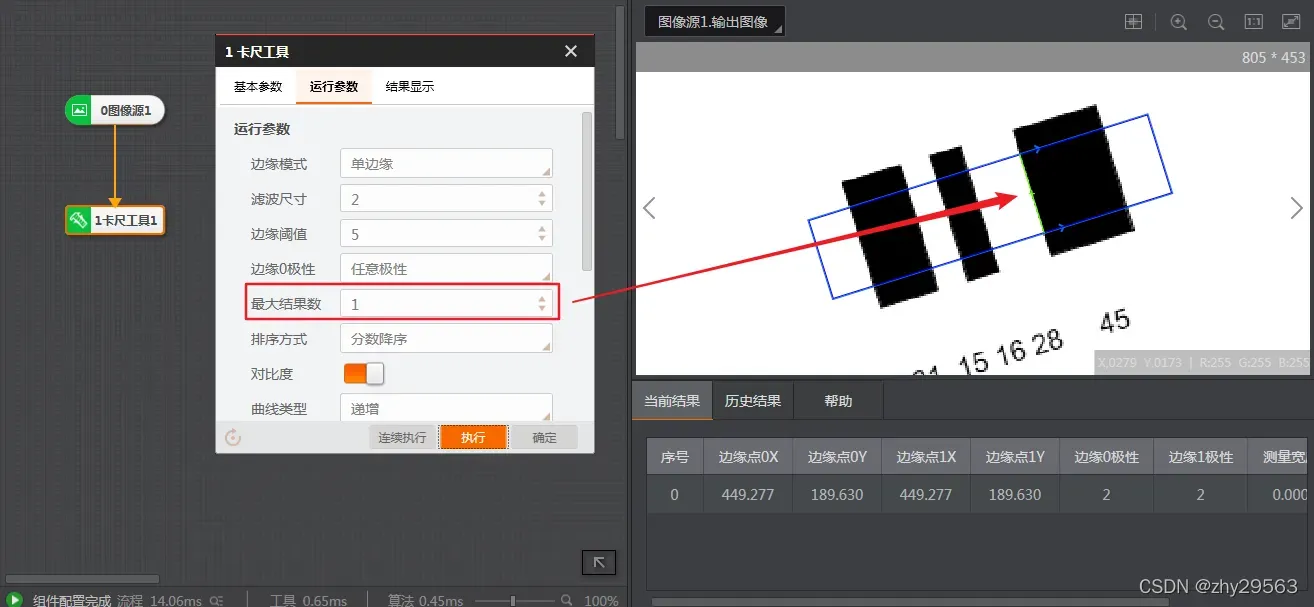
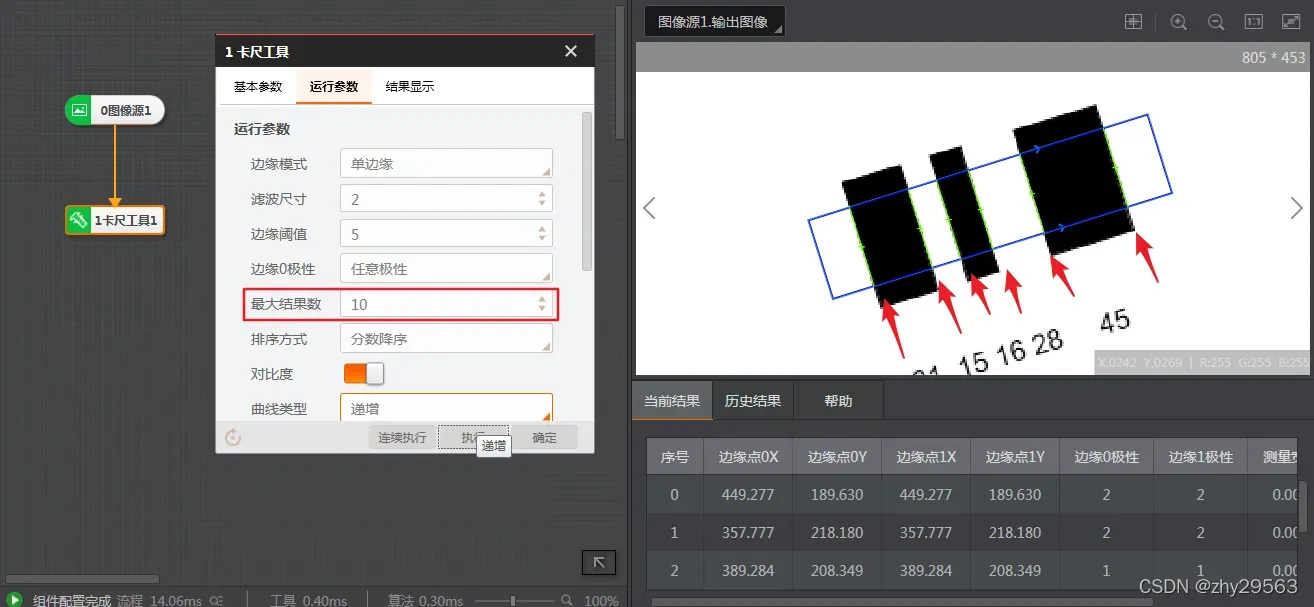
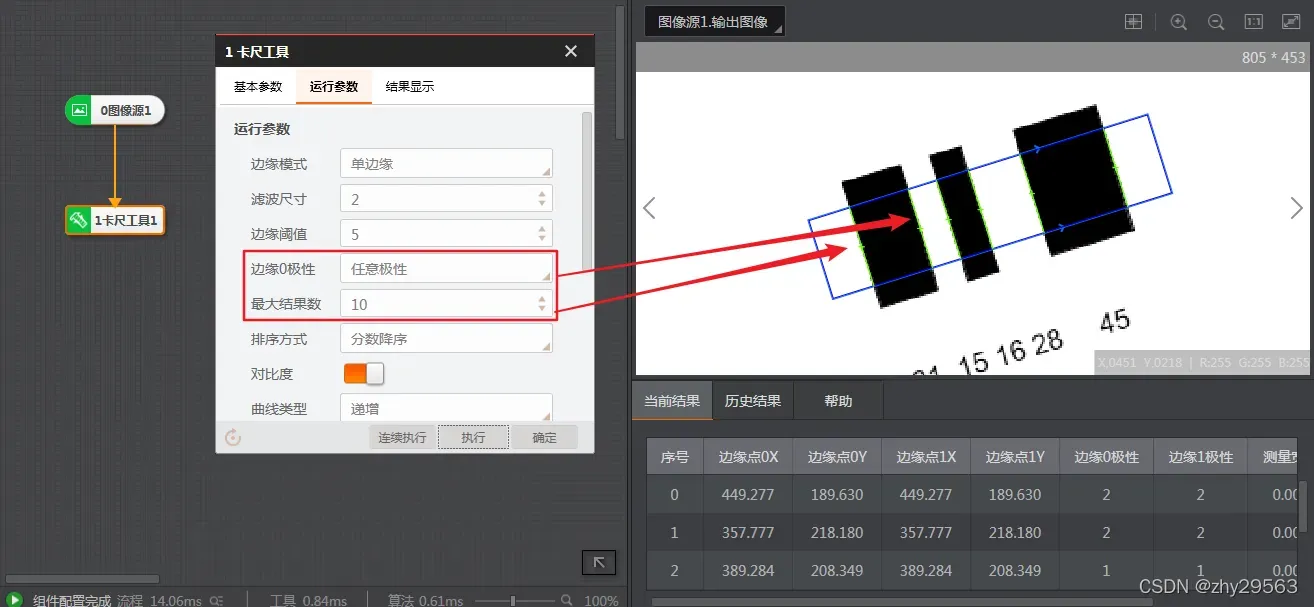
4.2 最大结果数参数
4.3 边缘极性参数
控制边缘方向的三个选项:
- 黑到白只提取从黑到白过渡的边缘

- 从白到黑,只提取从白到黑过渡的边缘
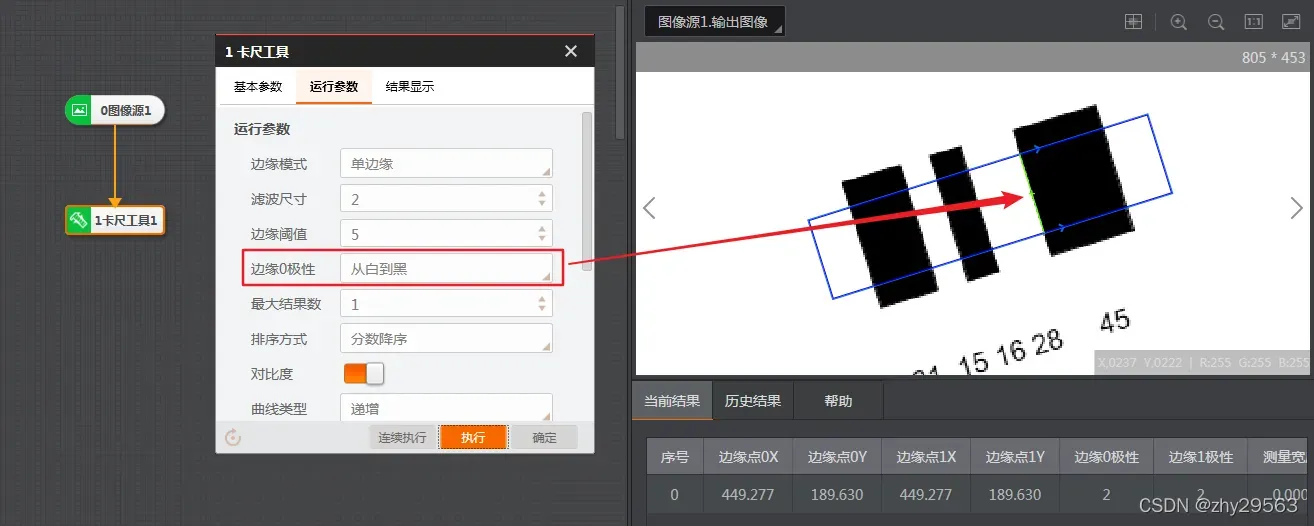
- 任意极性同时提取黑到白和白到黑的边缘
4.4 计分函数
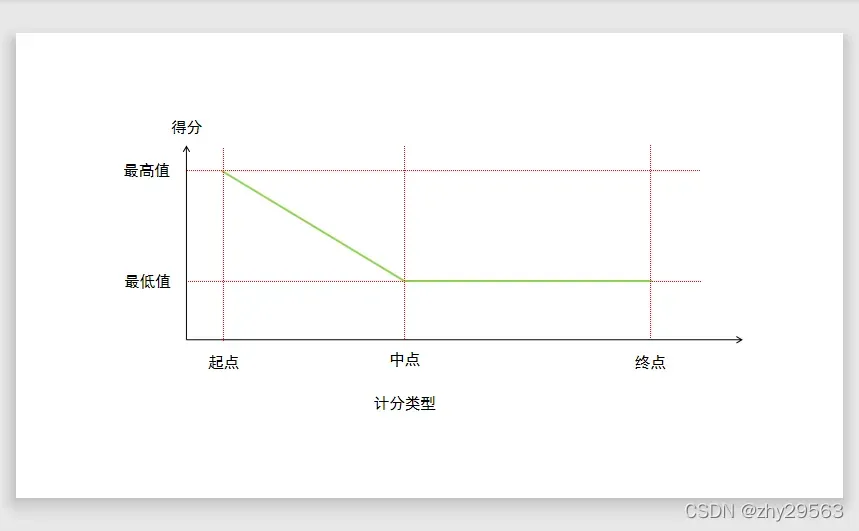
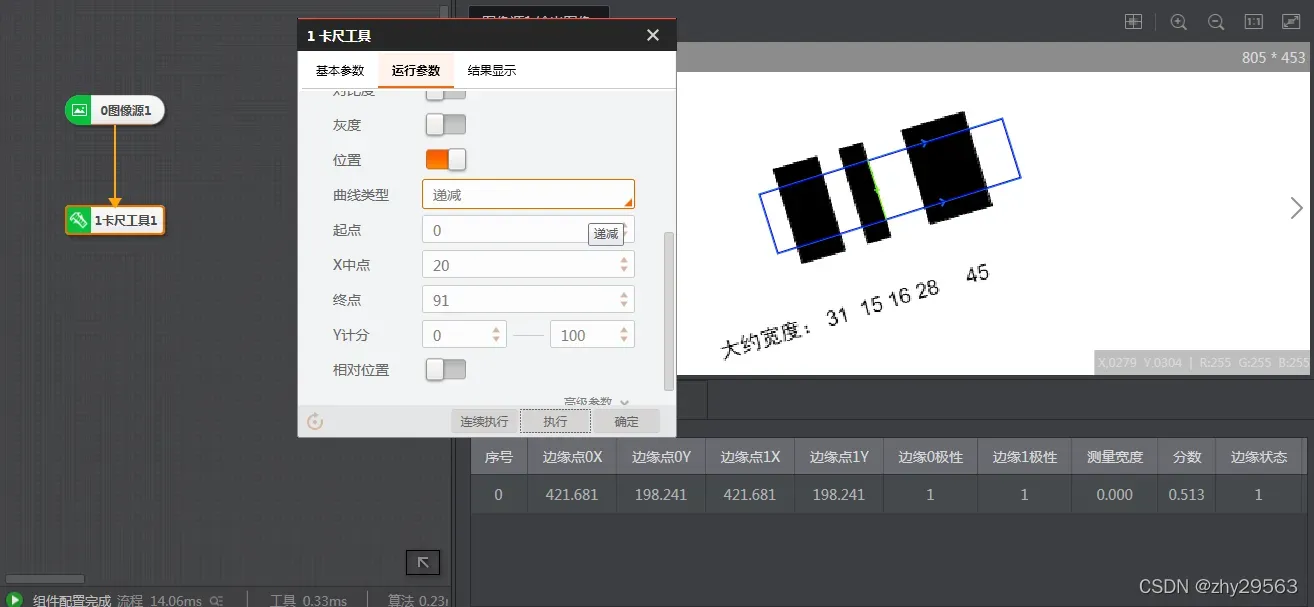
边缘按照指定的评分方法进行评分,提供对比度、边缘位置、相对位置和灰度均值四种方法。每个评分使能下有曲线类型、起点、中点、终点、计分高值、计分低值六个参数。曲线类型包括递增和递减类型。通过设置这六个参数,目标边缘点集的得分最高。
评分函数实际上是一个分段函数
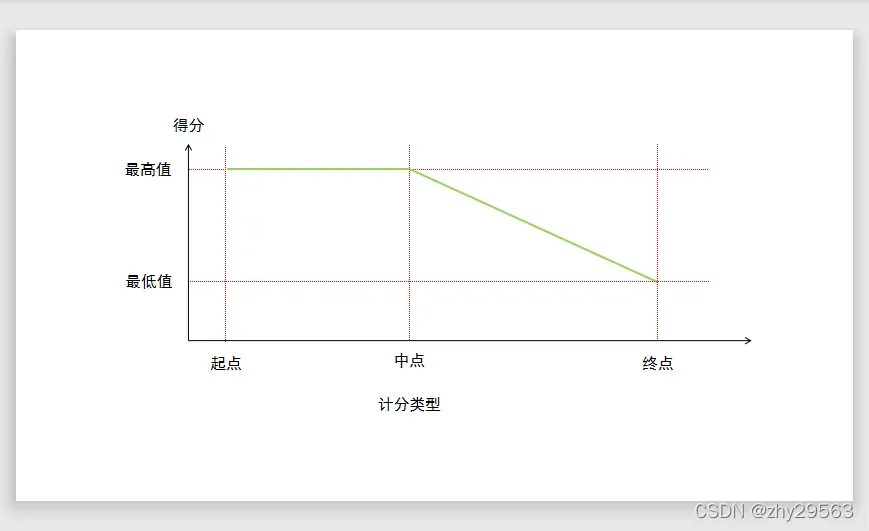
4.4.1 计分函数(分段函数)表现形式
- 形式一
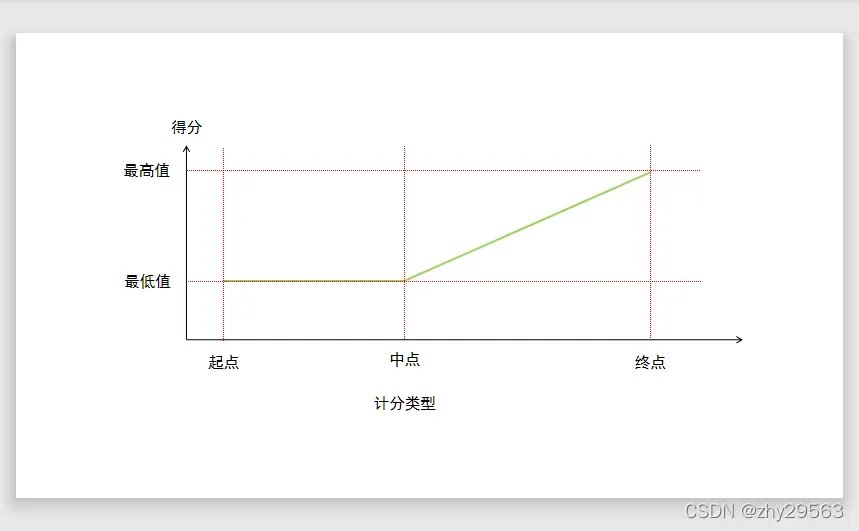
- 形式二
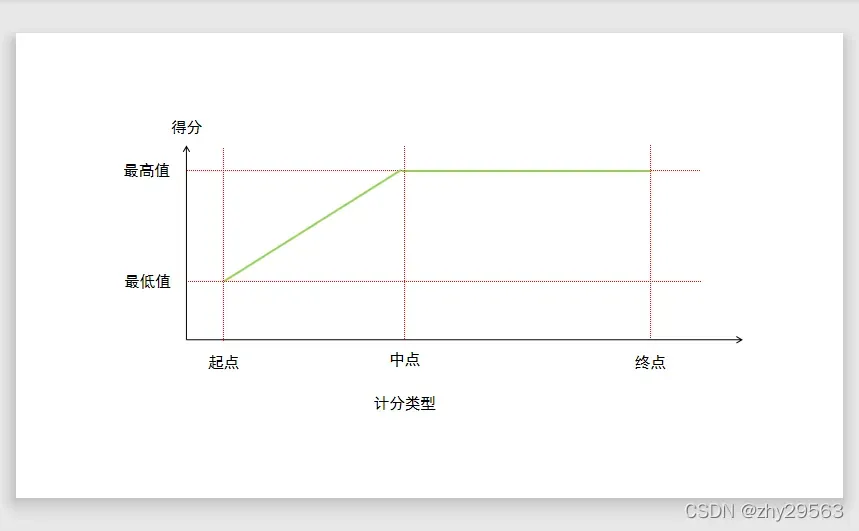
- 形式三
- 形式四
4.4.2 计分方式
- 对比
默认开启的计分方式。以边缘处的对比度作为计分函数的自变量,根据对比度计分函数计算出边缘的评分,最后选择出得分最高的边缘。由于使用的图像都是 8Bit 深度的灰度图像,因此,自变量的取值范围 [0, 255] 。
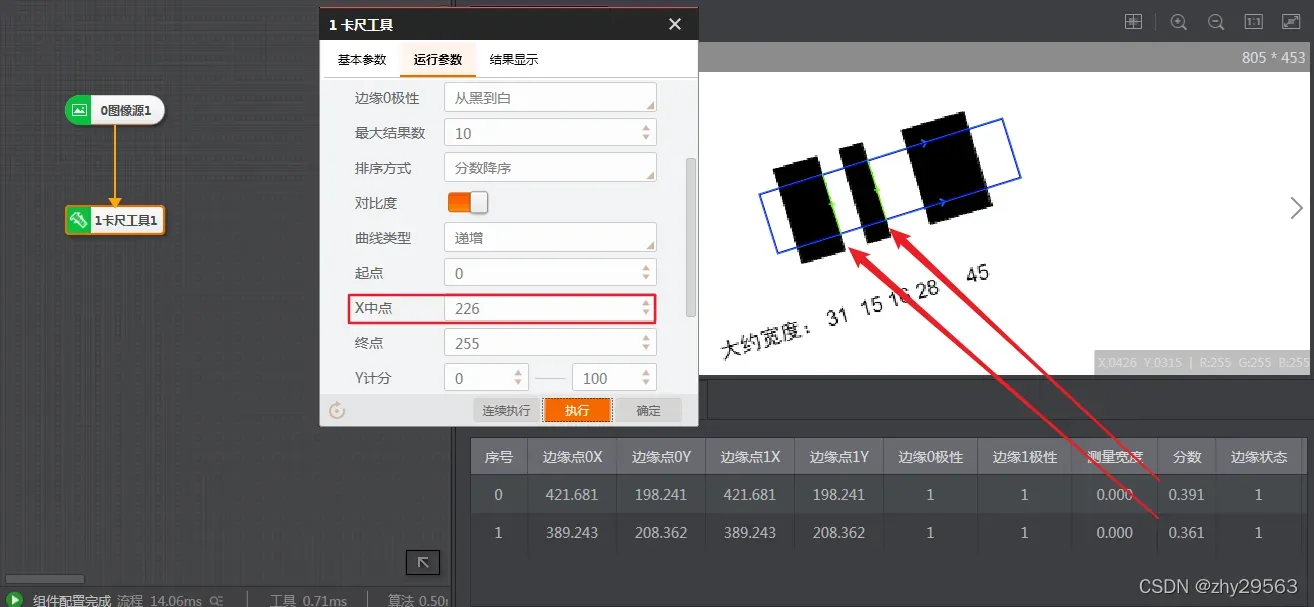
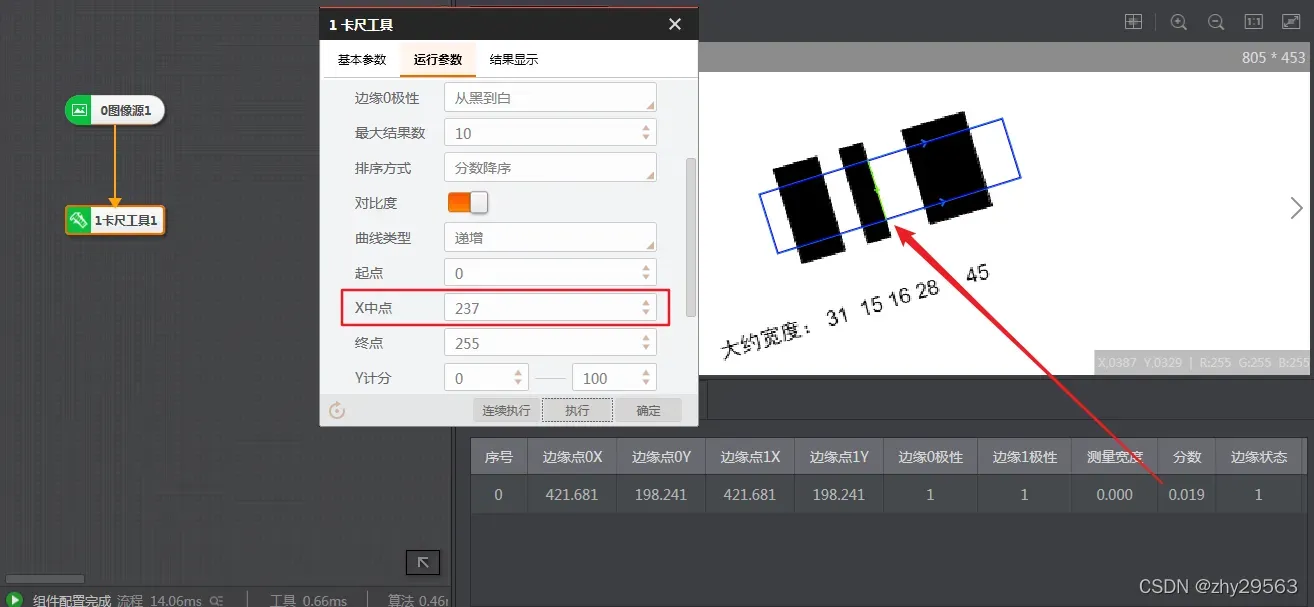
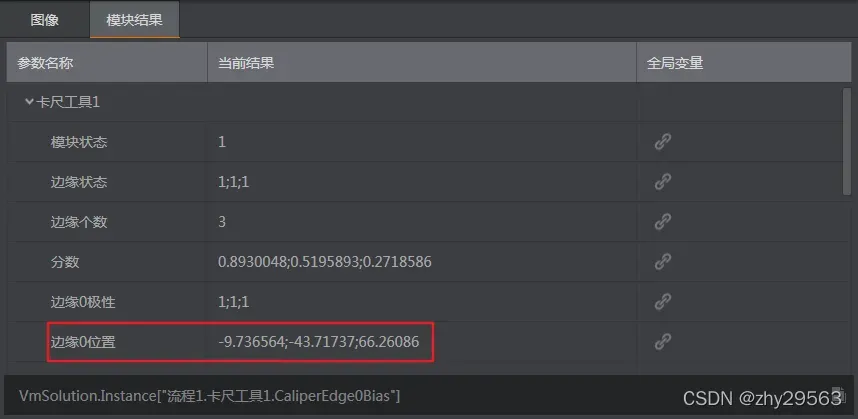
- 边缘位置
以边缘位置相对于查找区域中心的绝对距离作为计分函数的自变量。因此,自变量的取值范围 [0, search_length * 0.5] 。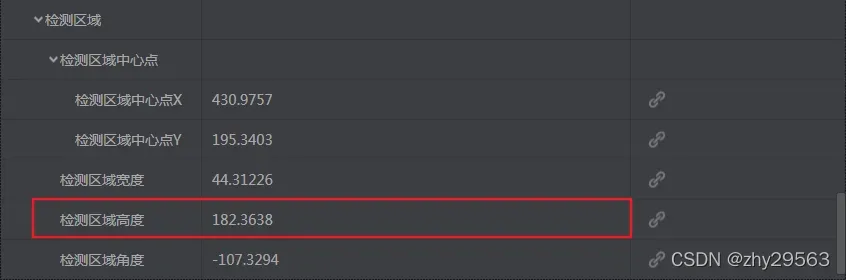
由上图可知,自变量的范围是 [0, 91.1819] 。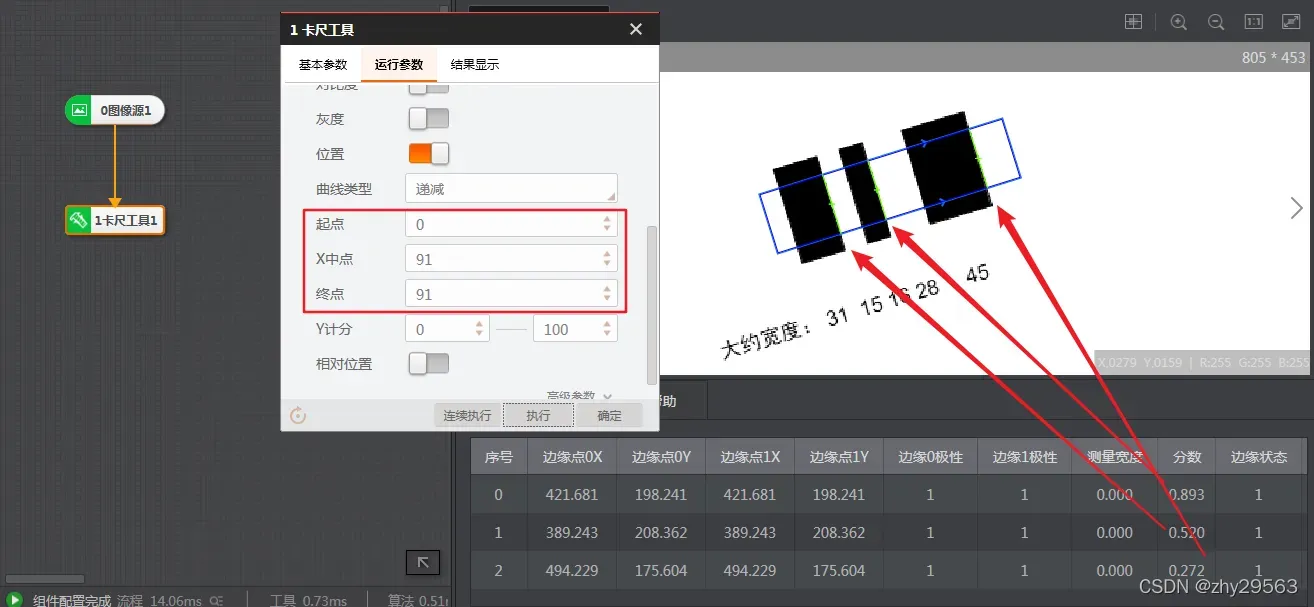

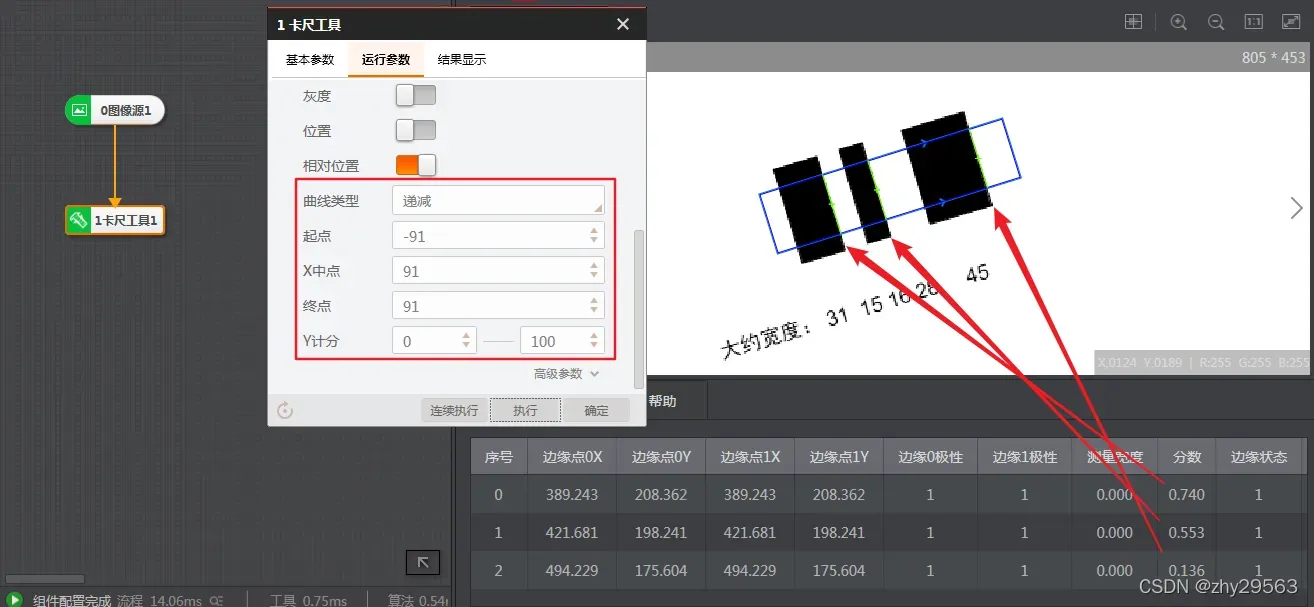
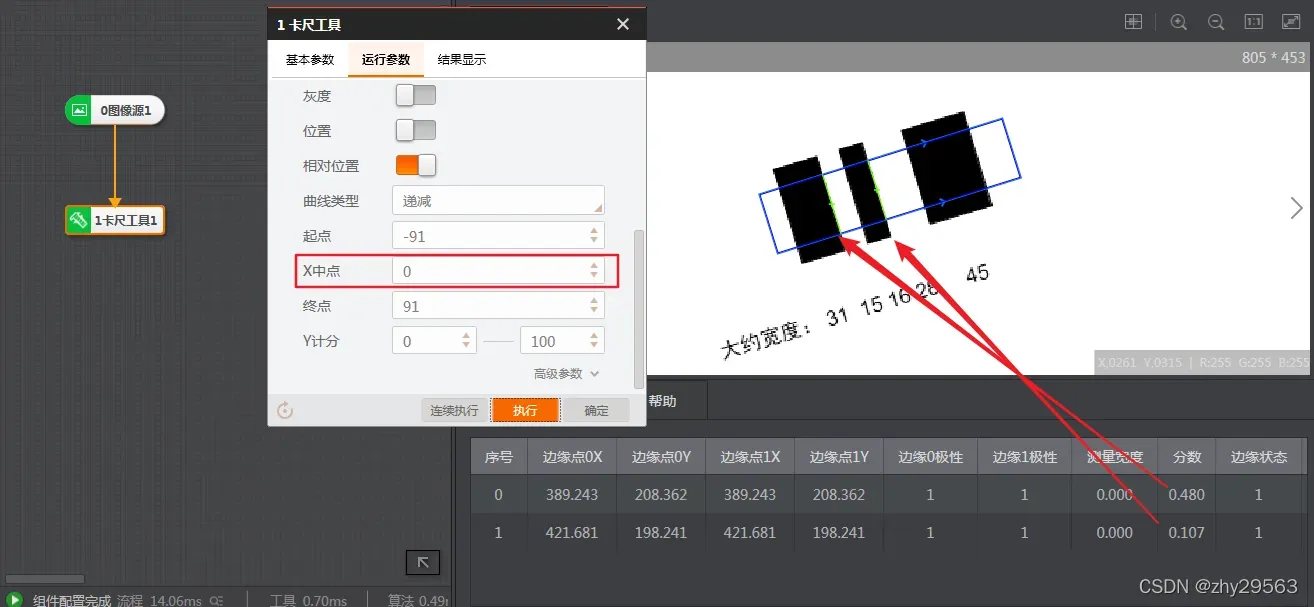
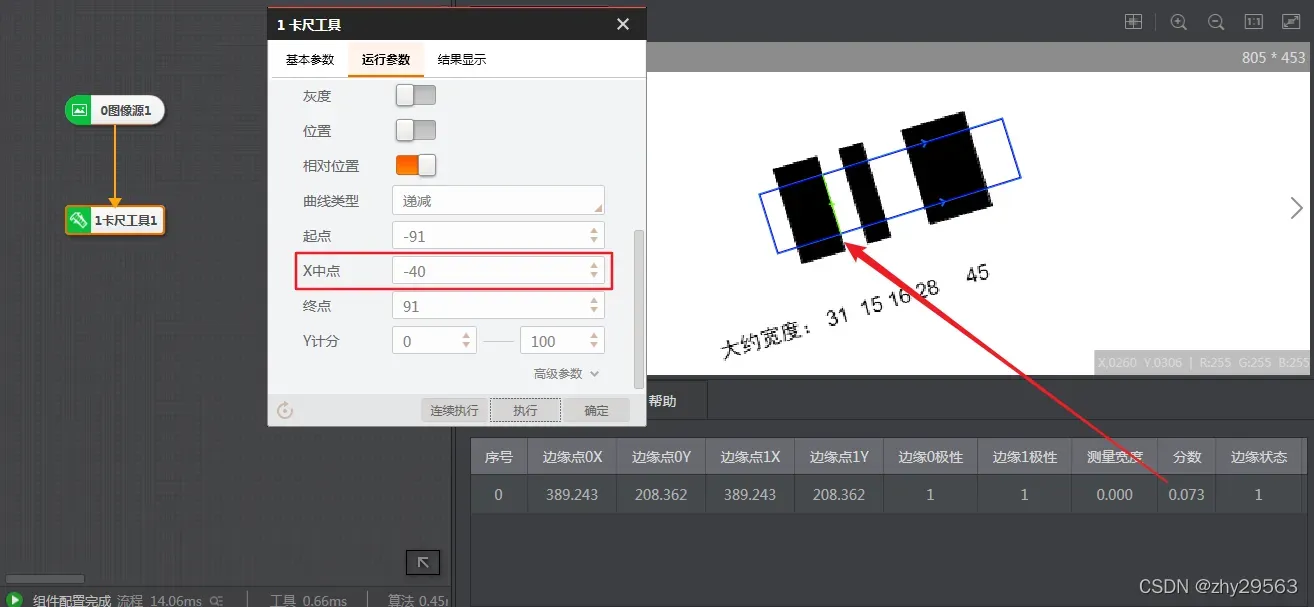
- 相对位置
以边缘位置相对于查找区域中心的相对距离作为计分函数的自变量。因此,自变量的取值范围 [search_length * 0.5, search_length * 0.5] 。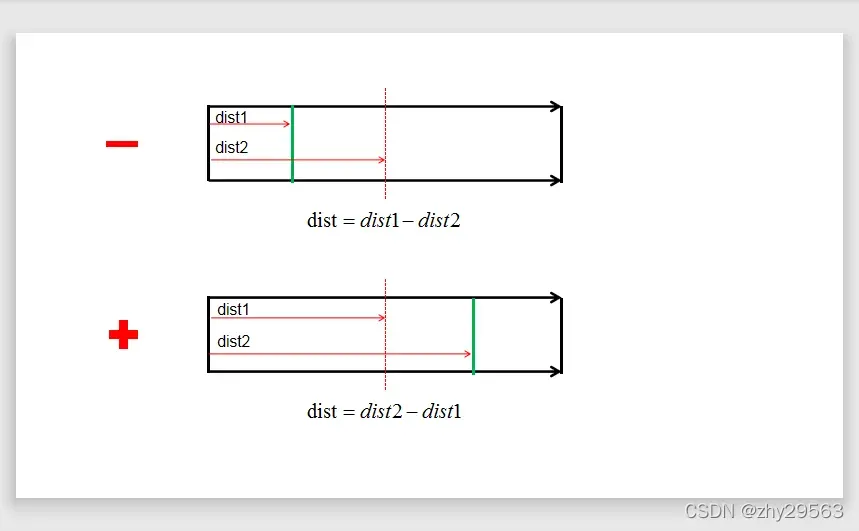
- 灰色均值
平均分是按地区预测的,评价率低。
5. 边缘对
边缘对方法一次提取两条边。除了单边提供的评分方法外,还提供了归一位置评分、归一相对位置评分、间距评分、间距评分和相对间距差评分五种评分方法。此外,边缘对模式还提供了一个新的参数边缘对宽度,用于计算实际输入评分函数的自变量。
- 对比
两边的对比平均值作为评分函数的自变量 - 地点
两个边缘位置的中点作为评分函数的自变量 - 相对位置
两个边缘位置的中点作为评分函数的自变量 - 灰色均值
两个边缘位置的灰度均值的平均值 - 归一化位置
论据 = |边缘对中心到搜索区域的距离 | / 边对宽度
| 边缘对中心到搜索区域中的距离 |的取值范围 [0, search_length * 0.5) 。
一般情况下,设置边缘对宽度为 search_length * 0.5 ,以保证自变量的取值范围是 [0, 1)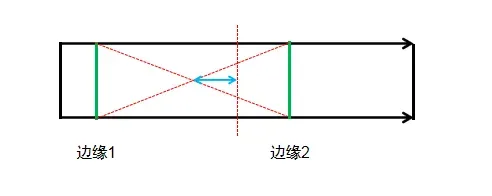
- 归一化相对位置
参数 = 从边缘对中心到搜索区域的距离 / 边缘对宽度
边缘对中心到搜索区域中的距离的取值范围 (-search_length * 0.5, search_length * 0.5) 。
一般情况下,设置边缘对宽度为 search_length * 0.5 ,以保证自变量的取值范围是 (-1, 1) - 间距
边缘到测量距离/边缘到宽度 - 间距差异
|边缘到测量距离边缘到宽度| / 边到宽度 - 相对间距差
(边到测量的距离 – 边到宽度)/边到宽度
由于试用版程序切换到edge pair模式,运行后提示错误,导致无法提供相关运行结果图片
文章出处登录后可见!
已经登录?立即刷新