



Foreground-Aware Relation Network for Geospatial Object Segmentation in High Spatial Resolution Remote Sensing Imagery
论文地址
代码地址
一、总体介绍
1.摘要
地理空间目标分割是一项特殊的语义分割任务,在高空间分辨率(HSR)遥感图像中,总是面临着较大的尺度变化、较大的背景类内方差和前景-背景不平衡。然而,一般的语义分割方法主要关注自然场景中的尺度变化,而没有充分考虑到大面积地球观测场景中经常出现的另外两个问题。本文认为这些问题是由于缺乏前景建模,并从基于关系和基于优化的前景建模的角度提出了一个前景感知关系网络(FarSeg),以缓解上述两个问题。从关系的角度来看,FarSeg通过学习前景-场景关系所关联的前景相关上下文,增强了对前景特征的识别能力。同时,从优化的角度出发,提出了一种前景感知优化方法,重点研究了平衡优化训练过程中的前景样本和背景的难样本。利用大规模数据集获得的实验结果表明,该方法优于现有的通用语义分割方法,并在速度和准确性之间实现了更好的权衡。
2.引言
与自然场景相比,HSR遥感图像的地理空间目标分割更具挑战性。至少有三个原因:
- 物体在HSR遥感图像中总是有更大尺度的变化。这就导致了多尺度问题,使得定位和识别物体很困难。
- HSR遥感图像的背景要复杂得多,由于类内方差较大,会导致严重的误报。
- 前景比例比在自然场景影像中小得多,导致了前景背景的不平衡,如图1所示。
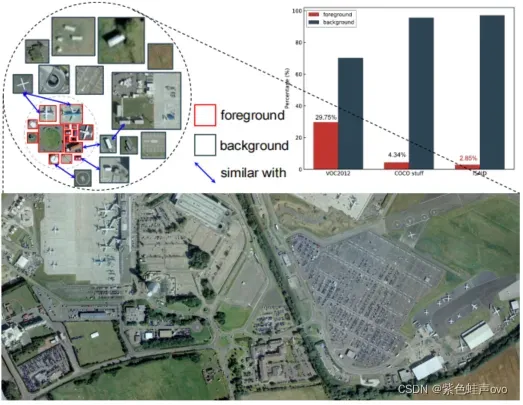
图1.HSR遥感图像中目标分割的主要挑战。(1)更大尺度的变化。(2)前景-背景失衡。(3)背景的类内方差。
本文提出了一种前景感知关系网络(FarSeg)来解决上述两个问题,利用明确的前景建模在HSR遥感图像中进行更鲁棒的目标分割。文中探讨了明确的前景建模的两个视角:基于关系的前景建模和基于优化的前景建模,并进一步在FarSeg中提出了两个模块:前景-场景关系模块和前景感知优化。前景-场景关系模块学习场景与前景之间的共生关系,将与前景相关的上下文关联起来,从而增强前景特征,从而减少误报。前景感知优化通过抑制大量简单的背景例子,将模型集中在前景上,以缓解前景-背景不平衡问题。
主要贡献如下:
- 提出了一种用于HSR遥感图像地理空间对象分割的前景感知关系网络(FarSeg)。
- 为了继承多尺度上下文建模和学习地理空间场景表示,FarSeg构建了基于特征金字塔网络(FPN)的前景分支,并在共享主干网络上建立场景嵌入分支,即多分支编码器。
- 为了抑制误报,F-S关系模块利用了地理空间场景与地理空间对象之间的共生关系,将与前景相关的上下文关联起来,增强了对前景特征的识别能力。同时,没有任何贡献的背景被这种共生关系所抑制,从而抑制了误报。
- 为了缓解前景-背景之间的不平衡,提出了F-A优化方法,将网络逐步集中在难样本上,从而降低许多简单样本对梯度的贡献,为前景-背景平衡训练。
3.前景感知关系网络 (Foreground-Aware Relation Network)
为了明确HSR遥感图像中目标分割的前景建模,我们提出了一个前景感知关系网络(FarSeg),如图2所示。所提出的FarSeg由特征金字塔网络(FPN)、前景场景(F-S)关系模块、轻量级解码器和前景感知(F-A)优化组成。FPN负责多尺度的目标分割。在F-S关系模块中,我们首先将假报警问题表述为前景中缺乏识别信息的问题,然后引入潜在场景语义和F-S关系来提高前景特征的识别能力。轻量级解码器的设计旨在恢复语义特征的空间分辨率。为了使网络在训练过程中关注前景,提出了F-A优化方法来缓解前景-背景不平衡问题。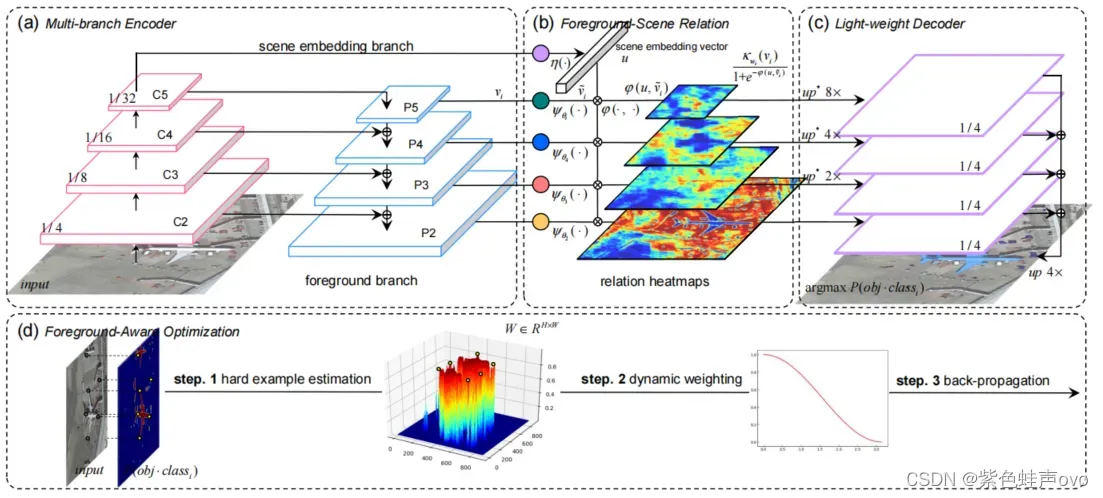

3.1 多路径编码(Multi-Branch Encoder)
多分支编码器由前景分支和场景嵌入分支组成。如图2(a)所示,这些分支都建立在一个主干网络之上。在该方法中,选择ResNets作为基本特征提取的主干网络。
其中,


3.2.前景-场景关系模块(Foreground-Scene Relation Module)
HSR遥感图像的背景要复杂得多。这意味着背景中存在较大的类内方差,导致误警问题。为了解决这一问题,提出了前景场景(F-S)关系模块,通过关联与地理空间场景相关的上下文来提高前景特征的识别能力。其主要思想如图3所示。F-S关系模块首先明确地建模前景与地理空间场景之间的关系,并利用潜在的地理空间场景将前景与相关上下文关联起来。然后利用该关系来增强输入特征图,以增加前景特征与背景特征之间的视差,从而提高前景特征的分辨能力。
如图2(b)所示,对于金字塔形特征图
其中,
其中,
其中
其中,
3.3轻量级解码器(Light-weight decoder)
轻量级解码器以轻量级方式从F-S关系模块中恢复关系增强语义特征映射的空间分辨率。轻量级解码器的详细体系结构如图5所示。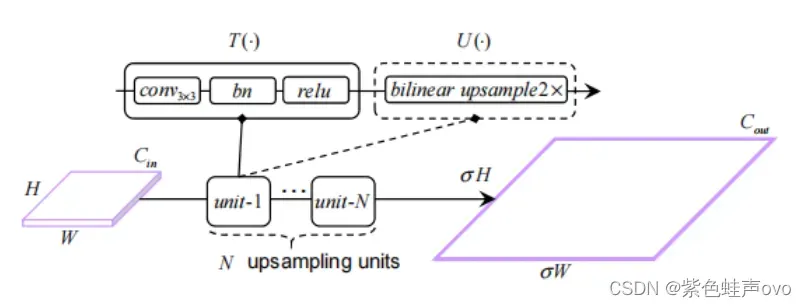
图5.针对每个金字塔级别的轻量级解码器的抽象体系结构。

给定来自
其中,
3.4。前景感知优化 (Foreground-Aware Optimization)
前景-背景不平衡问题通常会导致背景在训练过程中主导梯度。然而,在背景样本中,只有难样本部分对于训练后期的优化是有价值的,难样本比简单样本要少得多。在此基础上,提出了前景感知优化,使网络关注前景和难样本进行平衡优化。前景感知优化包括三个步骤:难样本估计、动态加权和反向传播,如图2(d).所示。
难样本估计。这一步用于获得反映实例的困难程度的权重,以调整像素级损失的分布。样本更难了,意味着权重更大。受
动态加权。硬例估计依赖于模型的判别。然而,在训练的初始阶段是不自信的,也会造成难例估计不自信。如果使用这种不自信难例权值,模型训练将是不稳定的,影响收敛性能。为了解决这一问题,我们提出了一种基于退火函数的动态加权策略。我们设计了三个退火函数作为候选项,如表1所示。给定交叉熵损失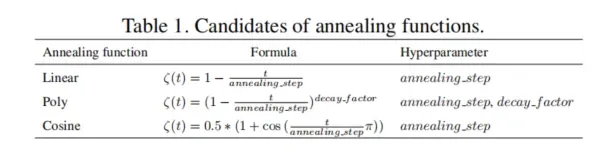


实验
实验部分对基于
二、方法分析与总结
核心代码
class SceneRelation(nn.Module):
def __init__(self,in_channels,channel_list,out_channels,scale_aware_proj=True):
super(SceneRelation, self).__init__()
self.scale_aware_proj = scale_aware_proj
if scale_aware_proj:
self.scene_encoder = nn.ModuleList(
[nn.Sequential(
nn.Conv2d(in_channels, out_channels, 1),
nn.ReLU(True),
nn.Conv2d(out_channels, out_channels, 1),
) for _ in range(len(channel_list))]
)
else:
# 2mlp
self.scene_encoder = nn.Sequential(
nn.Conv2d(in_channels, out_channels, 1),
nn.ReLU(True),
nn.Conv2d(out_channels, out_channels, 1),
)
self.content_encoders = nn.ModuleList()
self.feature_reencoders = nn.ModuleList()
for c in channel_list:
self.content_encoders.append(
nn.Sequential(
nn.Conv2d(c, out_channels, 1),
nn.BatchNorm2d(out_channels),
nn.ReLU(True)
)
)
self.feature_reencoders.append(
nn.Sequential(
nn.Conv2d(c, out_channels, 1),
nn.BatchNorm2d(out_channels),
nn.ReLU(True)
)
)
self.normalizer = nn.Sigmoid()
def forward(self, scene_feature, features: list):
content_feats = [c_en(p_feat) for c_en, p_feat in zip(self.content_encoders, features)]
if self.scale_aware_proj:
scene_feats = [op(scene_feature) for op in self.scene_encoder]
relations = [self.normalizer((sf * cf).sum(dim=1, keepdim=True)) for sf, cf in
zip(scene_feats, content_feats)]
else:
scene_feat = self.scene_encoder(scene_feature)
relations = [self.normalizer((scene_feat * cf).sum(dim=1, keepdim=True)) for cf in content_feats]
p_feats = [op(p_feat) for op, p_feat in zip(self.feature_reencoders, features)]
refined_feats = [r * p for r, p in zip(relations, p_feats)]
return refined_feats
编码过程为常用的特征金字塔结构,论文作者采用了循环的方式来定义模型,代码显得十分整洁。重点在于F-S关系的构建,通过特征金字塔得到scene features和content features(为一列表)。在关系模块中,如果考虑尺度,则需要先对scene features在每个尺度上编码再和content features进行作用,否则只获取最后的scene features进行关系建模。关系模块中最重要的一点,也是论文思想精髓所在,就是content features总是和潜在的场景有关,如飞机场这一场景总是和飞机与其周围的机场设施相关,但是也包含了大量背景信息。
代码中在不同尺度上将scene features 和content feature 做一个类似注意力的操作,以此作为权重对特征金字塔的特征进行加权(注意这里使用投影函数即1*1卷积核对齐了通道)。经过批归一化和ReLU激活,特征图关系值会分布在
class FarSeg(CVModule):
def __init__(self, config):
super(FarSeg, self).__init__(config)
self.register_buffer('buffer_step', torch.zeros((), dtype=torch.float32))
self.en = resnet.ResNetEncoder(self.config.resnet_encoder)
self.fpn = fpn.FPN(**self.config.fpn)
self.decoder = AssymetricDecoder(**self.config.decoder)
self.cls_pred_conv = nn.Conv2d(self.config.decoder.out_channels, self.config.num_classes, 1)
self.upsample4x_op = nn.UpsamplingBilinear2d(scale_factor=4)
self.device = torch.device('cuda') if torch.cuda.is_available() else torch.device('cpu')
if 'scene_relation' in self.config:
print('scene_relation: on')
self.gap = scm.GlobalAvgPool2D()
self.sr = SceneRelation(**self.config.scene_relation)
if 'softmax_focalloss' in self.config:
print('loss type: softmax_focalloss')
if 'cosineannealing_softmax_focalloss' in self.config:
print('loss type: cosineannealing_softmax_focalloss')
if 'annealing_softmax_focalloss' in self.config:
print('loss type: {}'.format(self.config.annealing_softmax_focalloss.annealing_type))
def forward(self, x, y=None):
feat_list = self.en(x)
fpn_feat_list = self.fpn(feat_list)
if 'scene_relation' in self.config:
c5 = feat_list[-1]
c6 = self.gap(c5)
refined_fpn_feat_list = self.sr(c6, fpn_feat_list)
else:
refined_fpn_feat_list = fpn_feat_list
final_feat = self.decoder(refined_fpn_feat_list)
cls_pred = self.cls_pred_conv(final_feat)
cls_pred = self.upsample4x_op(cls_pred)
整体上模型确实给人一种轻量的印象:代码真的很简洁!读下来让人佩服论文作者的思路,能够从一个很简单常见的问题出发,给出十分简洁明了的解决办法,最后代码还这么easy易读,科研动力立马上来了有木有!另外,论文作者还进行了难例估计和退火优化,代码在损失函数部分,就不在这里叙述了。感兴趣的读者可以继续深入学习!欢迎大家批评指正~!
文章出处登录后可见!