5. K-means for compression
(a)
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.image import imread
A = imread('./data/peppers-large.tiff')
plt.imshow(A)
plt.title('Original large image')
plt.savefig('./output/origin_large_sss.png')
plt.show()
A.shape
(512, 512, 3)
B = imread('./data/peppers-small.tiff')
plt.imshow(B)
plt.title('Original small image')
plt.savefig('./output/origin_small_sss.png')
plt.show()

B.shape
(128, 128, 3)
K = 16 # number of cluster
# Vectorization
data = np.zeros((B.shape[0]*B.shape[1], B.shape[2]))
for i in range(B.shape[2]):
data[:, i] = B[:, :, i].flatten()
def classification(data, centroids):
cluster_label = np.zeros((data.shape[0], 1))
for i in range(data.shape[0]):
min_distance = np.inf
for idx, cent in enumerate(centroids):
distance = np.linalg.norm(data[i] - cent)
if distance < min_distance:
min_distance = distance
cluster_label[i] = idx
return cluster_label
def clustering(data, centroids, max_iter=500, eps=1e-3):
it = 0
delta = None
while it<max_iter and (delta is None or (delta > eps)):
cluster_label = classification(data, centroids)
pre_centroids = centroids.copy()
for k in range(centroids.shape[0]):
centroids[k, :] = data[(cluster_label==k).flatten()].mean(axis=0)
it += 1
delta = np.zeros((centroids.shape[0]))
for k in range(centroids.shape[0]):
delta[k] = np.linalg.norm(centroids[k] - pre_centroids[k])
delta = delta.sum()
if it%20==0:
print(f'iter {it}; delta: {delta}')
print(f'converge at iter: {it}')
return centroids
# Initilize centroids
idx = np.random.choice(data.shape[0], K)
centroids = data[idx]
# Clustering
centroids = clustering(data, centroids, max_iter=500, eps=1e-3)
iter 20; delta: 10.958814248018108
iter 40; delta: 7.650785575480222
iter 60; delta: 3.464410790854772
iter 80; delta: 2.386007401884572
iter 100; delta: 0.7228731285630646
iter 120; delta: 0.020889361865652663
converge at iter: 130
centroids
array([[ 51.67832957, 3.36794582, 2.4469526 ],
[120.35643016, 166.04379157, 80.69456763],
[138.25799794, 188.62435501, 109.53560372],
[ 89.72991851, 19.57159488, 14.80209546],
[113.4451683 , 76.71009772, 41.53311618],
[155.57385524, 179.52732644, 79.35450517],
[197.03320312, 82.69140625, 58.44140625],
[109.49053201, 127.93237151, 60.871055 ],
[144.57407407, 121.23868313, 57.35390947],
[177.6183274 , 40.86298932, 38.09163701],
[184.28264556, 201.71113624, 89.60542679],
[193.62132353, 218.06433824, 191.63051471],
[201.44946026, 50.8562316 , 41.68547596],
[202.66255144, 134.78600823, 95.10288066],
[181.15721649, 202.4806701 , 147.27963918],
[144.21515152, 22.28585859, 24.46464646]])
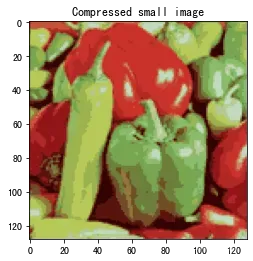
有了聚类以后的中心点以后,利用这16种颜色,重新输出small的imange看一下:
cluster_label = classification(data, centroids)
data_cmp = centroids[cluster_label.flatten().astype('int')]
def vector_to_image(data):
n = int(np.sqrt(data.shape[0]))
channel_num = data.shape[1]
image_array = np.zeros((n, n, channel_num))
for channel in range(channel_num):
for i in range(n):
for j in range(n):
image_array[i, j, channel] = data[j+i*n, channel]
return image_array
image_cmp = vector_to_image(data_cmp).astype('int')
plt.imshow(image_cmp)
plt.title('Compressed small image')
plt.savefig('./output/small_cmp.png')
plt.show()
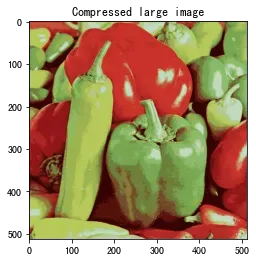
利用这个聚类压缩,显示一下原来的large图:
data_large = np.zeros((A.shape[0]*A.shape[1], A.shape[2]))
for i in range(A.shape[2]):
data_large[:, i] = A[:, :, i].flatten()
cluster_label = classification(data_large, centroids)
data_cmp = centroids[cluster_label.flatten().astype('int')]
image_cmp = vector_to_image(data_cmp).astype('int')
plt.imshow(image_cmp)
plt.title('Compressed large image')
plt.savefig('./output/large_cmp.png')
plt.show()
以上实现了题主的要求,但是没有使用他提供的代码。提供的代码在下面使用:
import argparse
import matplotlib.image as mpimg
import matplotlib.pyplot as plt
import numpy as np
import os
import random
def init_centroids(num_clusters, image):
"""
Initialize a `num_clusters` x image_shape[-1] nparray to RGB
values of randomly chosen pixels of`image`
Parameters
----------
num_clusters : int
Number of centroids/clusters
image : nparray
(H, W, C) image represented as an nparray
Returns
-------
centroids_init : nparray
Randomly initialized centroids
"""
# *** START YOUR CODE ***
H, W, C = image.shape
idx = np.random.randint(H * W, size=num_clusters)
centroids_init = image[(idx / W).astype('int'), idx % W].astype('float64')
# *** END YOUR CODE ***
return centroids_init
def update_centroids(centroids, image, max_iter=30, print_every=10):
"""
Carry out k-means centroid update step `max_iter` times
Parameters
----------
centroids : nparray
The centroids stored as an nparray
image : nparray
(H, W, C) image represented as an nparray
max_iter : int
Number of iterations to run
print_every : int
Frequency of status update
Returns
-------
new_centroids : nparray
Updated centroids
"""
# *** START YOUR CODE ***
# raise NotImplementedError('update_centroids function not implemented')
# Usually expected to converge long before `max_iter` iterations
# Initialize `dist` vector to keep track of distance to every centroid
# Loop over all centroids and store distances in `dist`
# Find closest centroid and update `new_centroids`
# Update `new_centroids`
H, W, C = image.shape
it = 0
while it<max_iter:
idx = np.zeros((H, W))
for i in range(H):
for j in range(W):
idx[i, j] = np.argmin(np.linalg.norm(centroids - image[i, j], axis=1))
loss = 0
for k in range(centroids.shape[0]):
pixel_group = image[idx==k]
if pixel_group.shape[0] > 0:
centroids[k] = pixel_group.mean(axis=0)
loss += np.linalg.norm(pixel_group - centroids[k], axis=1).sum() / pixel_group.shape[0]
it += 1
if it%print_every == 0:
print(f'Update centroids for {it} iterations. loss: {loss}')
new_centroids = centroids.astype('int')
# *** END YOUR CODE ***
return new_centroids
def update_image(image, centroids):
"""
Update RGB values of pixels in `image` by finding
the closest among the `centroids`
Parameters
----------
image : nparray
(H, W, C) image represented as an nparray
centroids : int
The centroids stored as an nparray
Returns
-------
image : nparray
Updated image
"""
# *** START YOUR CODE ***
# raise NotImplementedError('update_image function not implemented')
# Initialize `dist` vector to keep track of distance to every centroid
# Loop over all centroids and store distances in `dist`
# Find closest centroid and update pixel value in `image`
H, W, C = image.shape
for i in range(H):
for j in range(W):
idx = np.argmin(np.linalg.norm(centroids - image[i, j], axis=1))
image[i, j] = centroids[idx]
# *** END YOUR CODE ***
return image
def main(args):
# Setup
max_iter = args['max_iter']
print_every = args['print_every']
image_path_small = args['small_path']
image_path_large = args['large_path']
num_clusters = args['num_clusters']
figure_idx = 0
# Load small image
image = np.copy(mpimg.imread(image_path_small))
print('[INFO] Loaded small image with shape: {}'.format(np.shape(image)))
plt.figure(figure_idx)
figure_idx += 1
plt.imshow(image)
plt.title('Original small image')
plt.axis('off')
savepath = os.path.join('./output', 'orig_small.png')
plt.savefig(savepath, transparent=True, format='png', bbox_inches='tight')
# Initialize centroids
print('[INFO] Centroids initialized')
centroids_init = init_centroids(num_clusters, image)
# Update centroids
print(25 * '=')
print('Updating centroids ...')
print(25 * '=')
centroids = update_centroids(centroids_init, image, max_iter, print_every)
# Load large image
image = np.copy(mpimg.imread(image_path_large))
image.setflags(write=1)
print('[INFO] Loaded large image with shape: {}'.format(np.shape(image)))
plt.figure(figure_idx)
figure_idx += 1
plt.imshow(image)
plt.title('Original large image')
plt.axis('off')
savepath = os.path.join('.', 'orig_large.png')
plt.savefig(fname=savepath, transparent=True, format='png', bbox_inches='tight')
# Update large image with centroids calculated on small image
print(25 * '=')
print('Updating large image ...')
print(25 * '=')
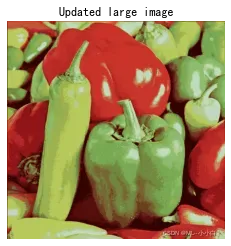
image_clustered = update_image(image, centroids)
plt.figure(figure_idx)
figure_idx += 1
plt.imshow(image_clustered)
plt.title('Updated large image')
plt.axis('off')
savepath = os.path.join('.', 'updated_large.png')
plt.savefig(fname=savepath, transparent=True, format='png', bbox_inches='tight')
print('\nCOMPLETE')
plt.show()
args = {'small_path':'./data/peppers-small.tiff',
'large_path':'./data/peppers-large.tiff',
'max_iter':150,
'num_clusters':16,
'print_every':10}
main(args)
[INFO] Loaded small image with shape: (128, 128, 3)
[INFO] Centroids initialized
=========================
Updating centroids ...
=========================
Update centroids for 10 iterations. loss: 287.33406566714154
Update centroids for 20 iterations. loss: 293.17031707511075
Update centroids for 30 iterations. loss: 289.05463689408185
Update centroids for 40 iterations. loss: 289.7203342683508
Update centroids for 50 iterations. loss: 291.69857088474464
Update centroids for 60 iterations. loss: 292.7079380586075
Update centroids for 70 iterations. loss: 294.0093854504812
Update centroids for 80 iterations. loss: 290.71606658419853
Update centroids for 90 iterations. loss: 289.3786115762488
Update centroids for 100 iterations. loss: 289.2435041593222
Update centroids for 110 iterations. loss: 289.3114982662104
Update centroids for 120 iterations. loss: 289.4224368481482
Update centroids for 130 iterations. loss: 289.4559613074356
Update centroids for 140 iterations. loss: 289.66534816497483
Update centroids for 150 iterations. loss: 289.74233512832046
[INFO] Loaded large image with shape: (512, 512, 3)
=========================
Updating large image ...
=========================
COMPLETE
(f)
原始图像3个通道,对于其中一个像素,每个通道使用一个字节(8bits=1Byte)表示通道颜色,所以一共是3个字节(24bits),变换之后,对一个像素而言,只有16种颜色可以选择,只需要,也就是4bits就可以表示,因此压缩因子为
文章出处登录后可见!
已经登录?立即刷新