三角测量以计算 3D 坐标
注意:三角测量必须在双目相机立体匹配后计算,对于核校正后的图像
对极校正请参考我上一篇博文:相机成像+单应变换+相机标定+立体校正[0]
下图为立体校正后的成像平面布局: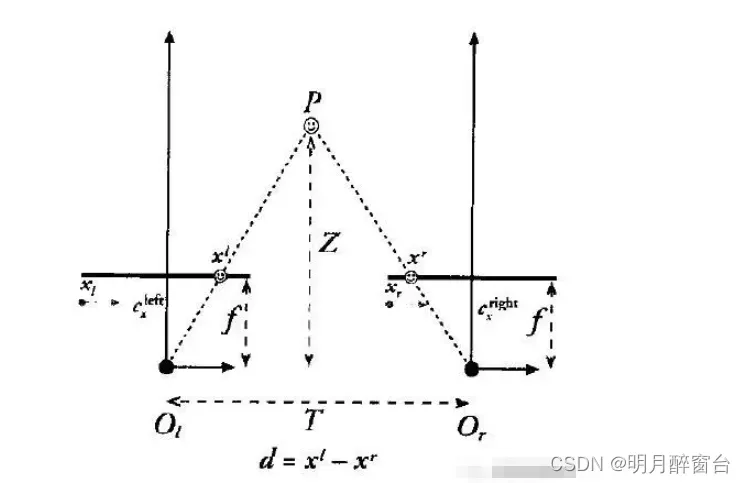
1.视差测距法:
根据三角形相似原理得出深度z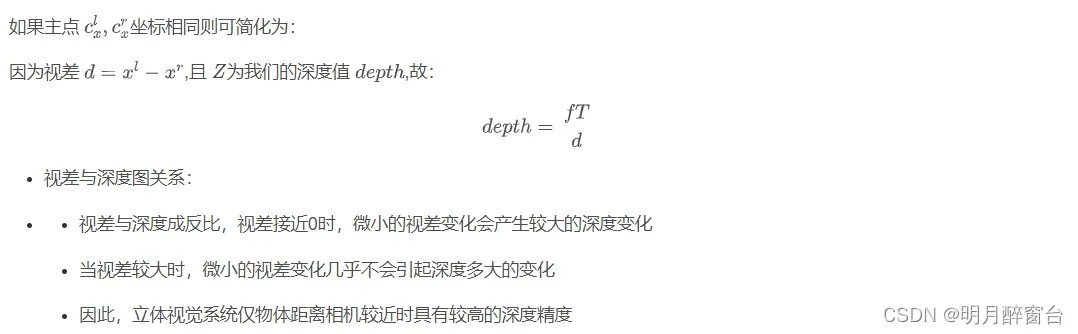
相机坐标、世界坐标、图像坐标的变换关系: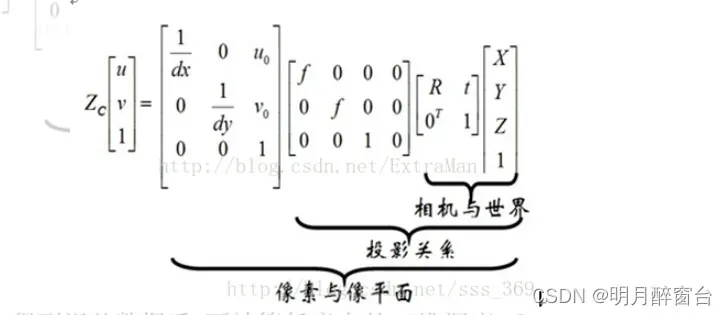
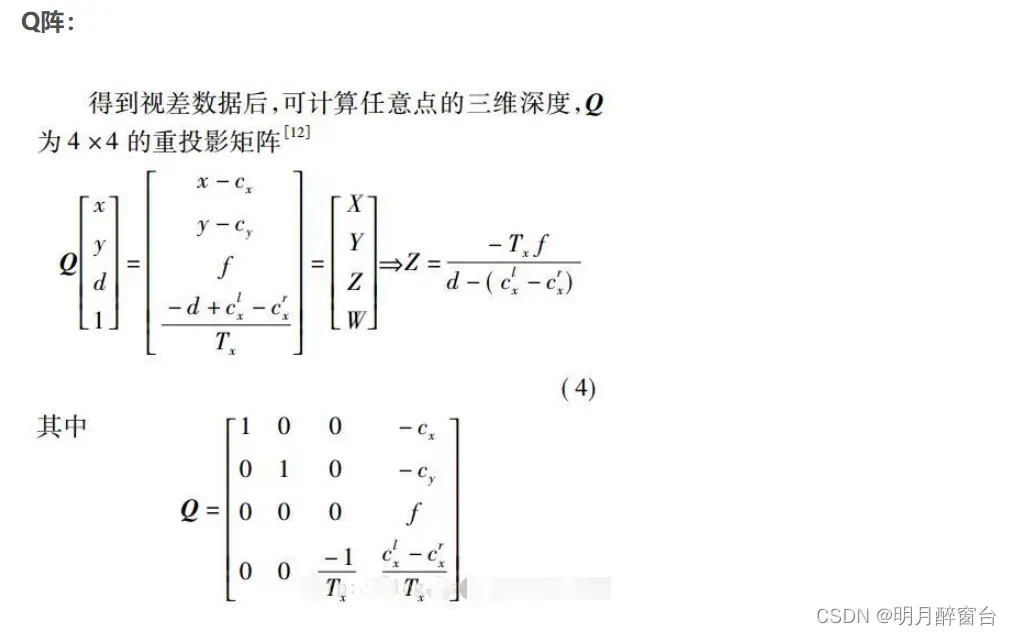
算法实现的具体原理:
极线校正(立体校正)后获得相机在新坐标系下的投影矩阵Q
stereoRectify(camera.cameraMatrix1, camera.distCoeffts1,
camera.cameraMatrix2, camera.distCoeffts2, camera.size_,
camera.R, camera.T,R1, R2, P1, P2, Q);
如上,可以实现双目相机得到的左右双图像推导3D坐标点的算法:
参考:opencv双目视觉特征匹配点三角测量得到三维坐标[0]
void StereoTo3D(const::vector<Point2f> ptsL, const::vector<Point2f> ptsR, Mat Q, Mat T, vector<Point3f>& pts3D)
{
//1三角测量
if (ptsL.size() != ptsR.size())
{
cout << "匹配点数量出现错误" << endl;
return;
}
float cx = -Q.at<double>(0, 3);
float cy = -Q.at<double>(1, 3);
float f = Q.at<double>(2, 3);
float B = sqrt(T.at<double>(0, 0) * T.at<double>(0, 0) + T.at<double>(1, 0) * T.at<double>(1, 0) + T.at<double>(2, 0) * T.at<double>(2, 0));
pts3D.resize(ptsL.size());
for (int i = 0; i < ptsL.size(); i++)
{
pts3D[i].x = (ptsL[i].x - cx) * B / (ptsL[i].x - ptsR[i].x);
pts3D[i].y = (ptsL[i].y - cy) * B / (ptsL[i].x - ptsR[i].x);
pts3D[i].z = f * B / (ptsL[i].x - ptsR[i].x);
}
assert(!diffs.empty());
}
2.最小二乘求解
三角测量(triangulation), 就是在不同的姿态下观察同一个对象,根据图像上的同名点的像素坐标,计算对象的三维坐标。
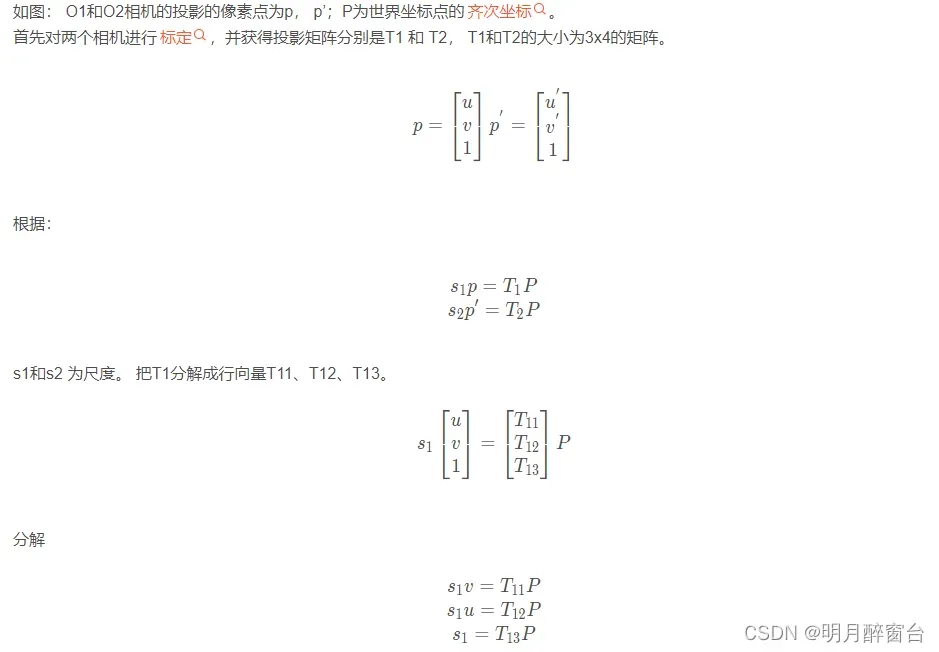
在双目视觉中,左右摄像头是分开的,可以同时获取左右视图。根据同名匹配点和左右摄像机的投影矩阵,可以计算出同名匹配点的世界坐标。
参考:三角测量计算点的 3D 坐标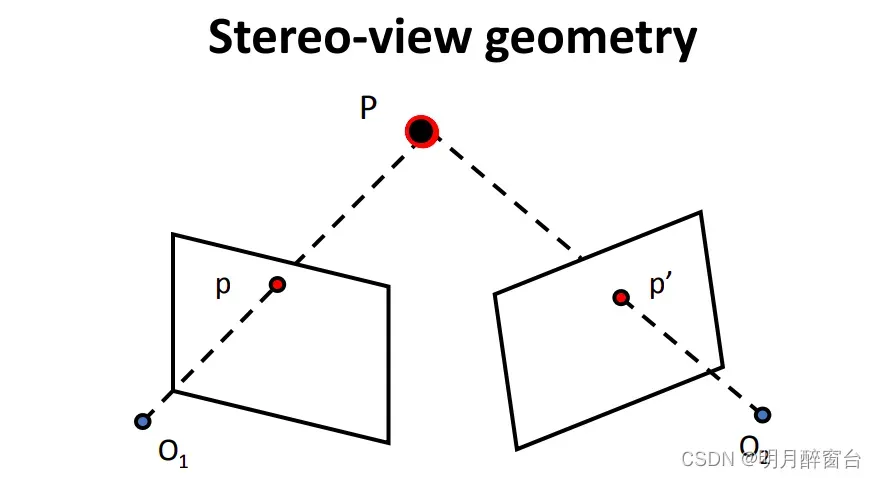
 [0]
[0]
/**
* @param T1 相机O1的投影矩阵
* @param T2 相机O2的投影矩阵
* @param p1 相机O1的图像的像素点
* @param p2 相机O2的图像的像素点
* @param out 输出的三维坐标
*/
void triangulatePoint(Matrix<double, 3, 4>& T1, Matrix<double, 3, 4>& T2, Vector2d& p1, Vector2d&p2, Vector3d& out){
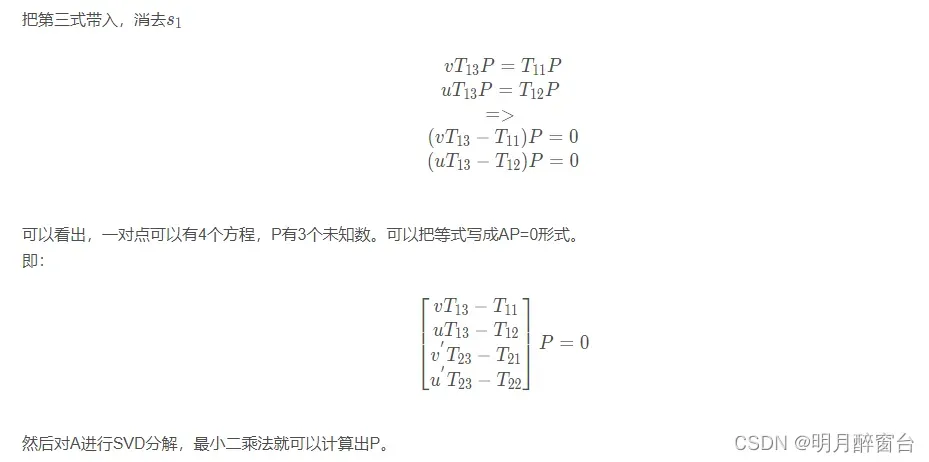
// 构建Ax = 0;
Matrix<double, 4, 4> A;
A.row(0) = p1(0)*T1.row(2) - T1.row(0);
A.row(1) = p1(1)*T1.row(2) - T1.row(1);
A.row(2) = p2(0)*T2.row(2) - T2.row(0);
A.row(3) = p2(1)*T2.row(2) - T2.row(1);
// SVD 分解
Eigen::JacobiSVD<MatrixXd> solver(A, Eigen::ComputeFullU|Eigen::ComputeThinV);
MatrixXd V = solver.matrixV();
VectorXd X = V.rightCols(1);
out[0] = X(0)/X(3);
out[1] = X(1)/X(3);
out[2] = X(2)/X(3);
}
OpenCV库,也已经实现了cv::triangulatePoints,其中,P1,P2为极线校正后的相机的投影矩阵
void triangulateByOpenCV(Matrix<double, 3, 4>& T1, Matrix<double, 3, 4>& T2, Vector2d& p1, Vector2d&p2, Vector3d& out){
Mat T_mat1, T_mat2;
cv::eigen2cv(T1, T_mat1);
cv::eigen2cv(T2, T_mat2);
std::vector<Point2d> p1s,p2s;
p1s.push_back(Point2d(p1.x(), p1.y()));
p2s.push_back(Point2d(p2.x(), p2.y()));
Mat pts_4d;
cv::triangulatePoints(T_mat1, T_mat2, p1s, p2s, pts_4d);
Mat X = pts_4d.col(0);
X /=X.at<double>(3,0);
out[0] = X.at<double>(0, 0);
out[1] = X.at<double>(1, 0);
out[2] = X.at<double>(2, 0);
}
文章出处登录后可见!
已经登录?立即刷新