原因:Detection, Tracking and ID · Issue #367 · Smorodov/Multitarget-tracker · GitHub
看到了仓库更新了issue,其中有一个小、快目标的跟踪。学习一下作者的思路和效果,记录如下:
一、效果
目标大小:3~4pixel, 相机静止;鸟类或者苍蝇。
跟踪效果如下:
快速小目标的跟踪
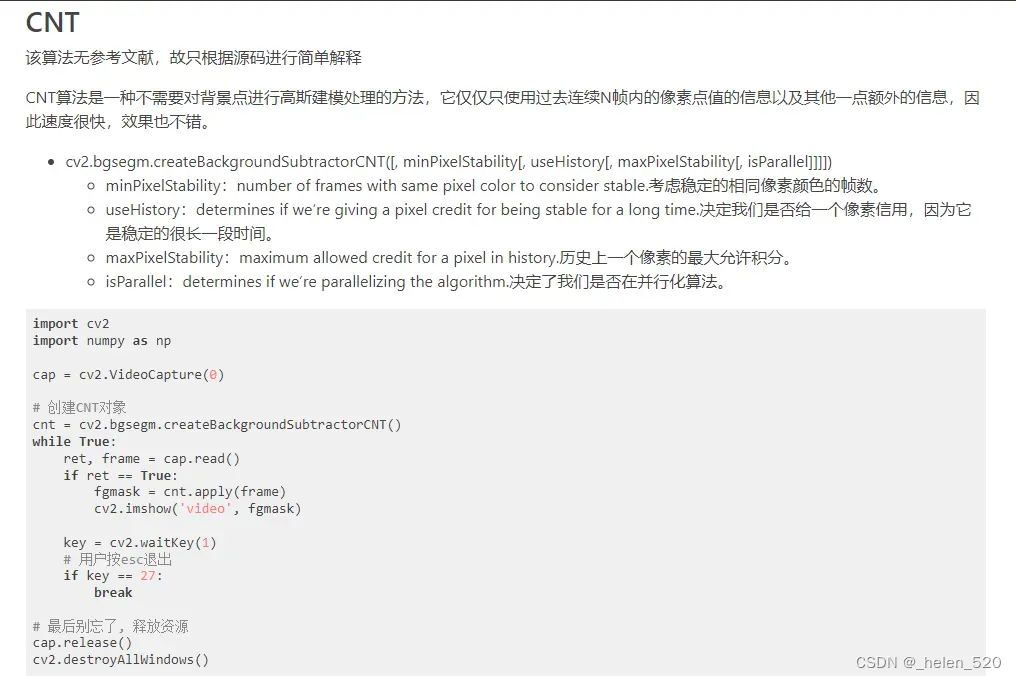
1.1 检测算法:CNT
算法设置:使用的CNT
一些注意事项:
- 我们将检测非常小的物体:https ://github.com/Smorodov/Multitarget-tracker/blob/master/example/examples.h#L57
- 最好的背景减法算法 – MOG:https ://github.com/Smorodov/Multitarget-tracker/blob/master/example/examples.h#L62
- 新卡尔曼设置:https ://github.com/Smorodov/Multitarget-tracker/blob/master/example/examples.h#L123
- 这里是最小轨迹大小:https ://github.com/Smorodov/Multitarget-tracker/blob/master/example/examples.h#L200

使用的是opencv的CNT背景提取算法 :介绍参考:Background Segment CNT – mysticalwing – 博客园
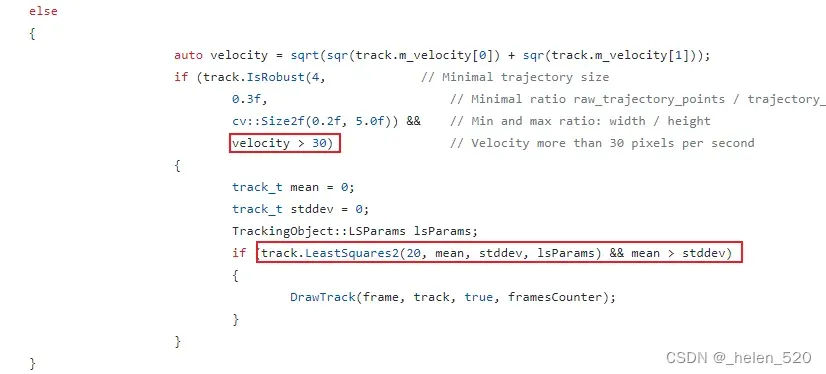
2.2 跟踪滤波:kalman速度约束>30pixel
这个前提是:分配算法是OK的。kalman速度适应上了。
Multitarget-tracker/trajectory.h at master · Smorodov/Multitarget-tracker · GitHub
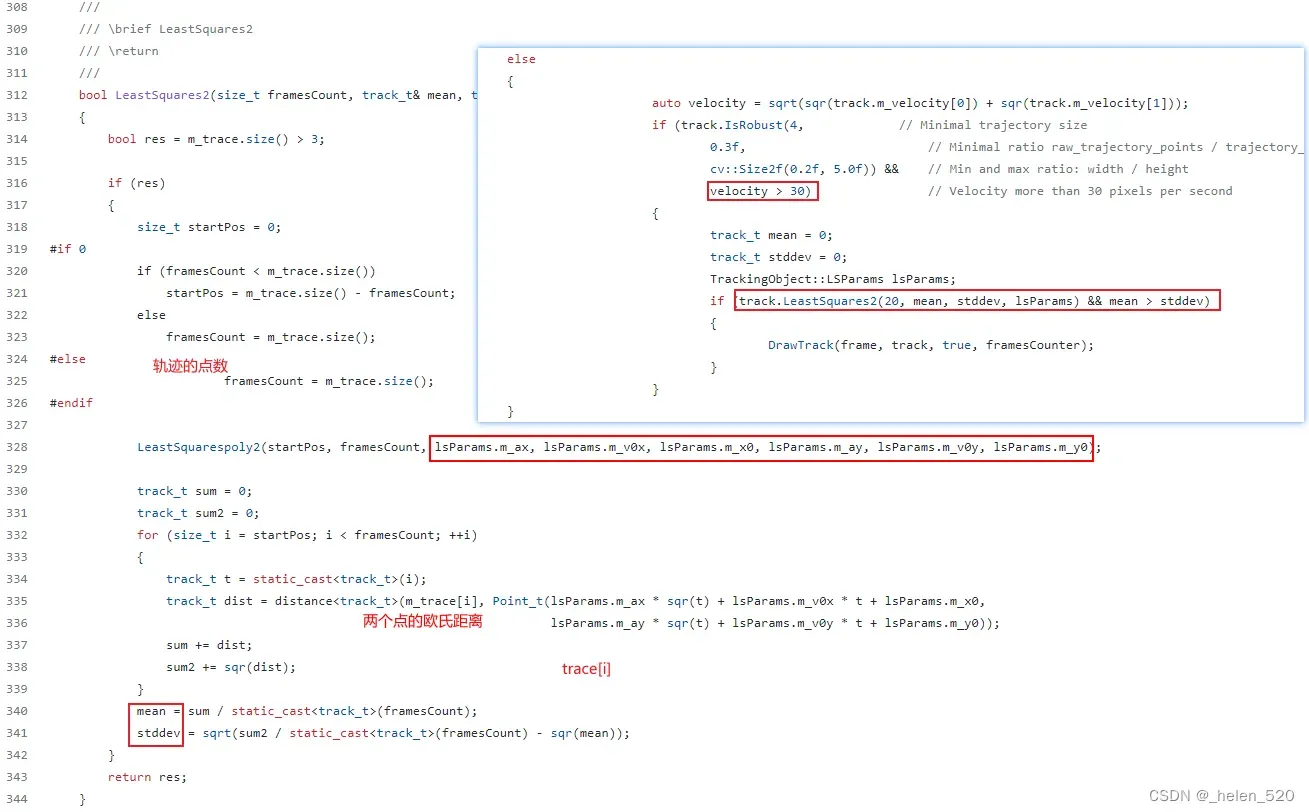
最小二乘法:根据轨迹,计算一个crammers 3*3的线性系统的crammers rule,如果mean>std,就把这个轨迹输出。
why?
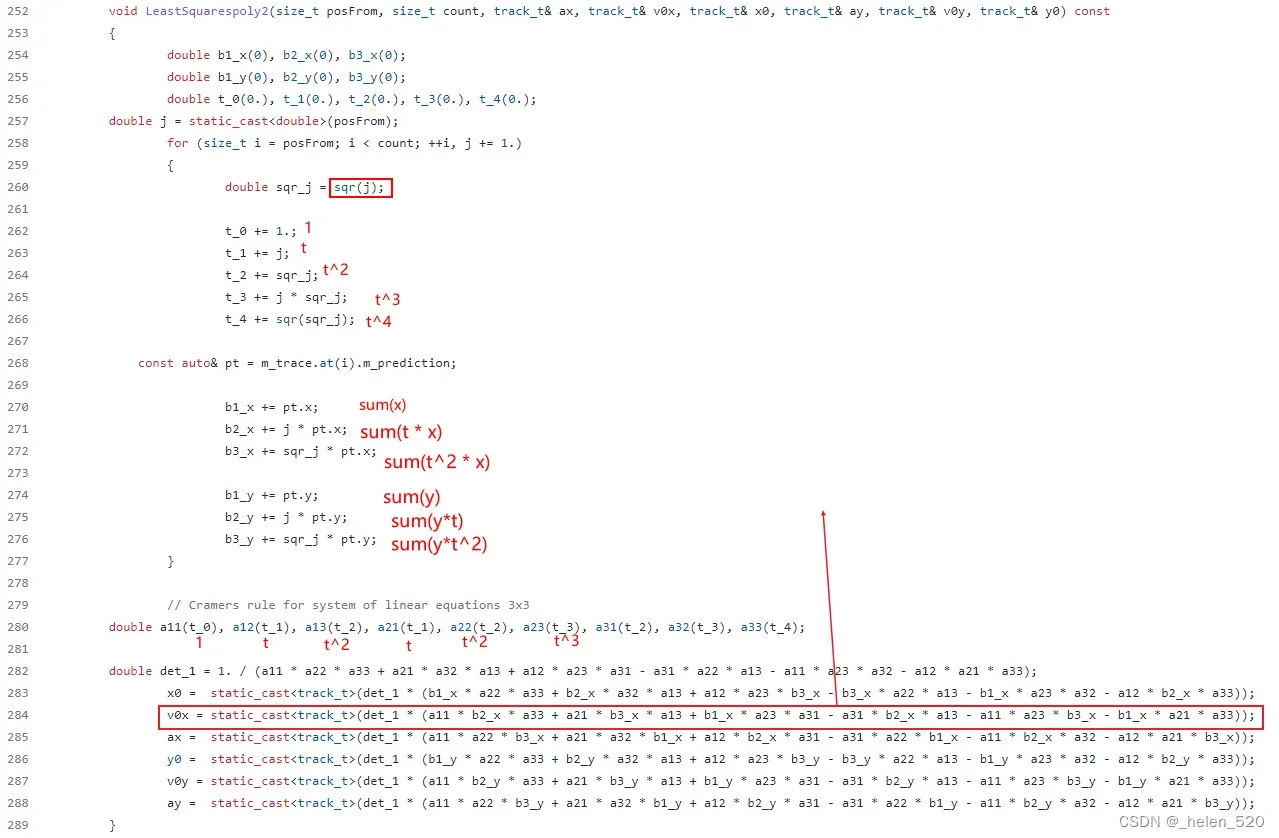
用最小二乘去估计出6个参数,从轨迹点中估计出6个参数,posx, vx, ax, posy, vy, ay。之前是估计速度v,所以是计算s与t的一个线性投影(最小二乘)。是两个变量之间的关系。
这里按照作者的意思是一个3*3的线性系统的crammer rule 法则。估计出的,就是一个参考值。
然后轨迹 – 参考值的偏差的均值和方差。如果均值在一个sigma的方差之外,那么就输出这个轨迹。
文章出处登录后可见!
已经登录?立即刷新