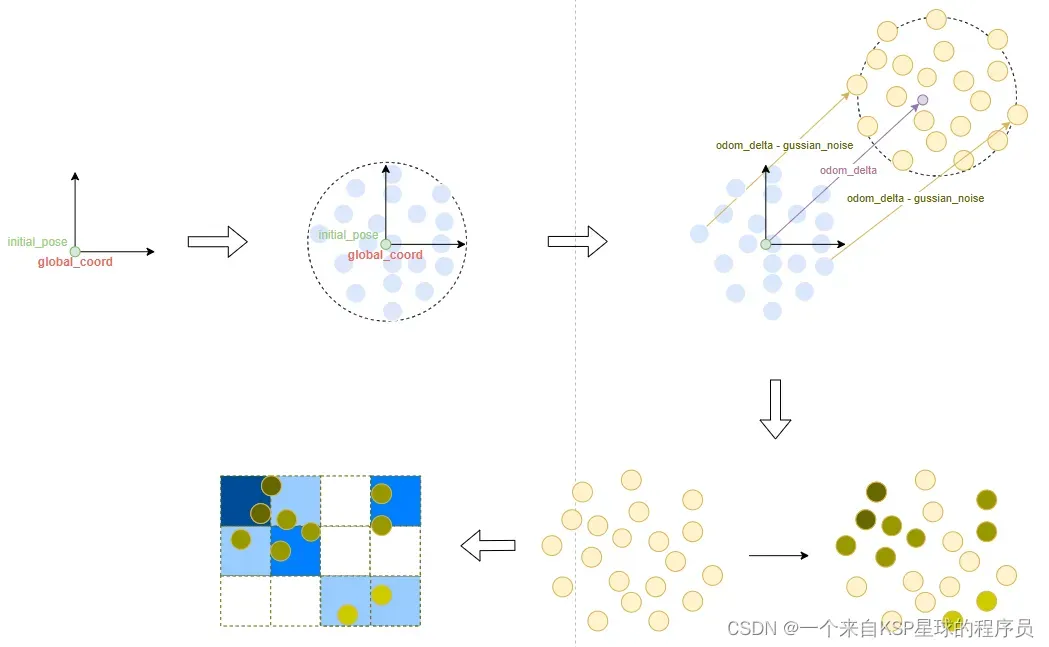
1. 从高斯分布中随机采样,生成初始粒子
以global坐标系为参考坐标系,以初始位姿(默认为0)作为初始粒子分布的均值,从参数服务器中获取位姿的协方差矩阵,实现的函数在AmclNode::handleMapMessage中,关键代码如下:
updatePoseFromServer(); // 从参数服务器更新初始位姿
pf_vector_t pf_init_pose_mean = pf_vector_zero();
pf_init_pose_mean.v[0] = init_pose_[0];
pf_init_pose_mean.v[1] = init_pose_[1];
pf_init_pose_mean.v[2] = init_pose_[2];
pf_matrix_t pf_init_pose_cov = pf_matrix_zero();
pf_init_pose_cov.m[0][0] = init_cov_[0];
pf_init_pose_cov.m[1][1] = init_cov_[1];
pf_init_pose_cov.m[2][2] = init_cov_[2];
pf_init(pf_, pf_init_pose_mean, pf_init_pose_cov); // 以均值0和相应的初始协方差初始化滤波器
pf_init_ = false;
生成后的粒子分布示意如下图所示:
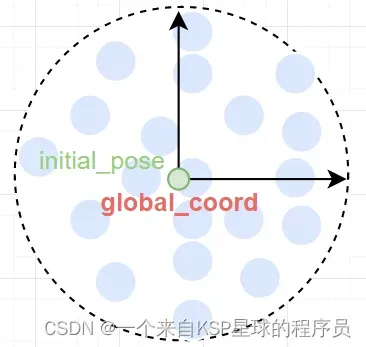
其中,initial_pose在global坐标系下的坐标为(0, 0, 0)
2. 预测粒子位姿
当接收到里程计信息后,从里程计模型中采样,估计粒子群的预测位姿,关键实现函数为AMCLOdom::UpdateAction,示意图如下所示:
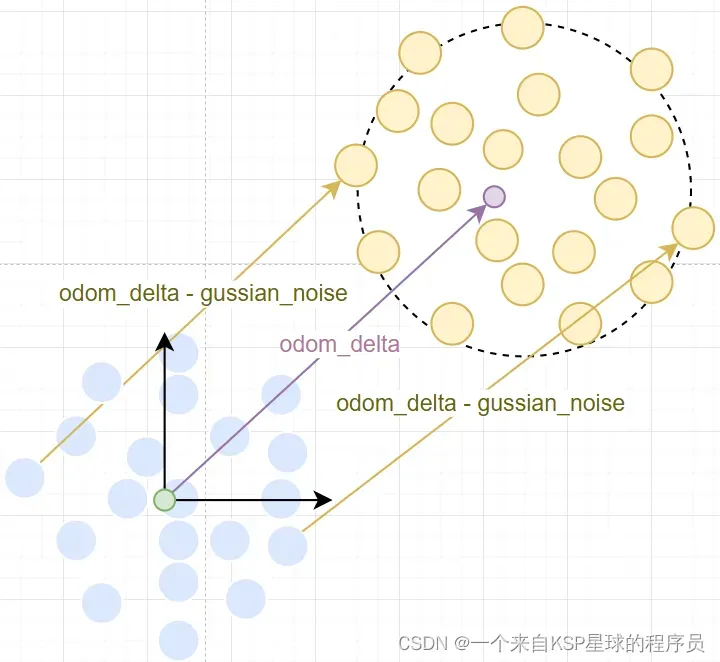
如上图所示,经过机器人的运动,蓝色粒子群从里程计的反馈中采样,转移到了黄色粒子群的分布。
里程计反馈的信息是odom_delta,但是由于里程计固有的高斯随机误差,所以实际的位姿变化是(odom_delta – gussian_noise),而这其中,对于粒子群的每一次计算,gussian_noise的值是不一样的,其值的服从pdf(0, alpha * odom_delata)。
由于里程计估计的误差,参考蓝色粒子分布,预测后的黄色粒子分布更为分散,状态的不确定性提高。
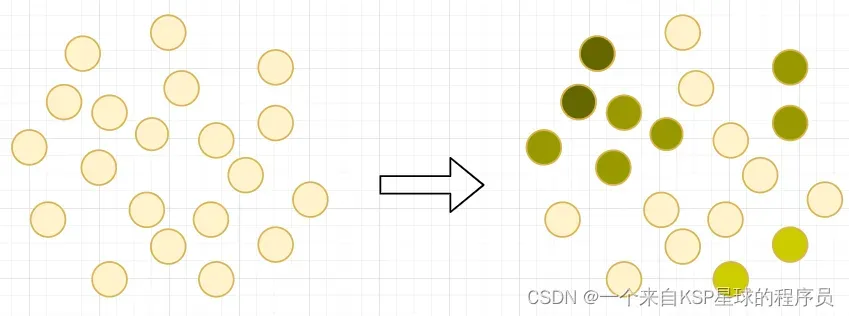
3. 更新粒子位姿
当接收到测量数据(以激光测量为例)后,通过测量模型,将测量数据放到各个粒子的位姿下,判断测量数据发生的可能性,以这个可能性来更新粒子的权重。
以测量似然域模型为例:将激光的测量数据放到各个粒子位姿下,然后计算激光测量的端点与地图最近障碍物的距离,距离越小激光测量数据发生的可能性越大,粒子的权重越大。
代码中的关键实现函数是AMCLLaser::UpdateSensor,示意图如下所示,其中粒子颜色越深,权重越大。
4. 重采样
如果打开了有选择重采样,程序会判断粒子集合权重的方差,方差越大有效的粒子越小,粒子退化越严重,此时则需要进行重采样,否则可以跳过此步骤。
重采样之前,程序会维持粒子群的短期权重(w_fast)和长期权重(w_slow)的平均值,并以max[0, 1-w_fast/w_slow]的概率增加随机粒子,否则,进行低方差重采样算法。
正常情况下,如果没有发生如机器人绑架情况,增加随机粒子的概率很低,暂时先不考虑。重采样之后,粒子的数量不变,权重较小的粒子将被过滤掉,权重较大的粒子将被复制,程序中的关键实现函数是pf_update_resample,示意图如下所示:
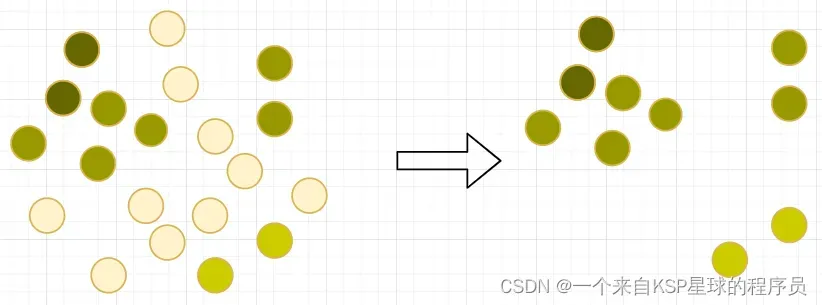
其中,颜色越深的位置粒子的数量越多。
5. 将重采样后的粒子放入直方图中
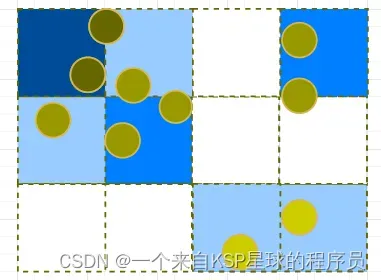
将重采样后粒子的位姿,放入到对应的直方图中。用kd-tree维护直方图的数据结构,直方图的位姿作为key,粒子的权重作为value。关键实现函数是:pf_kdtree_insert。示意图如下,其中,直方图内粒子的数量越多,直方图的颜色越深,代表该直方图的权重越大。
对应amcl中的kd-tree的插入,以距离相差最大的维度作为主轴,每一个kd-tree的节点都存放了直方图的坐标信息,示意图如下:

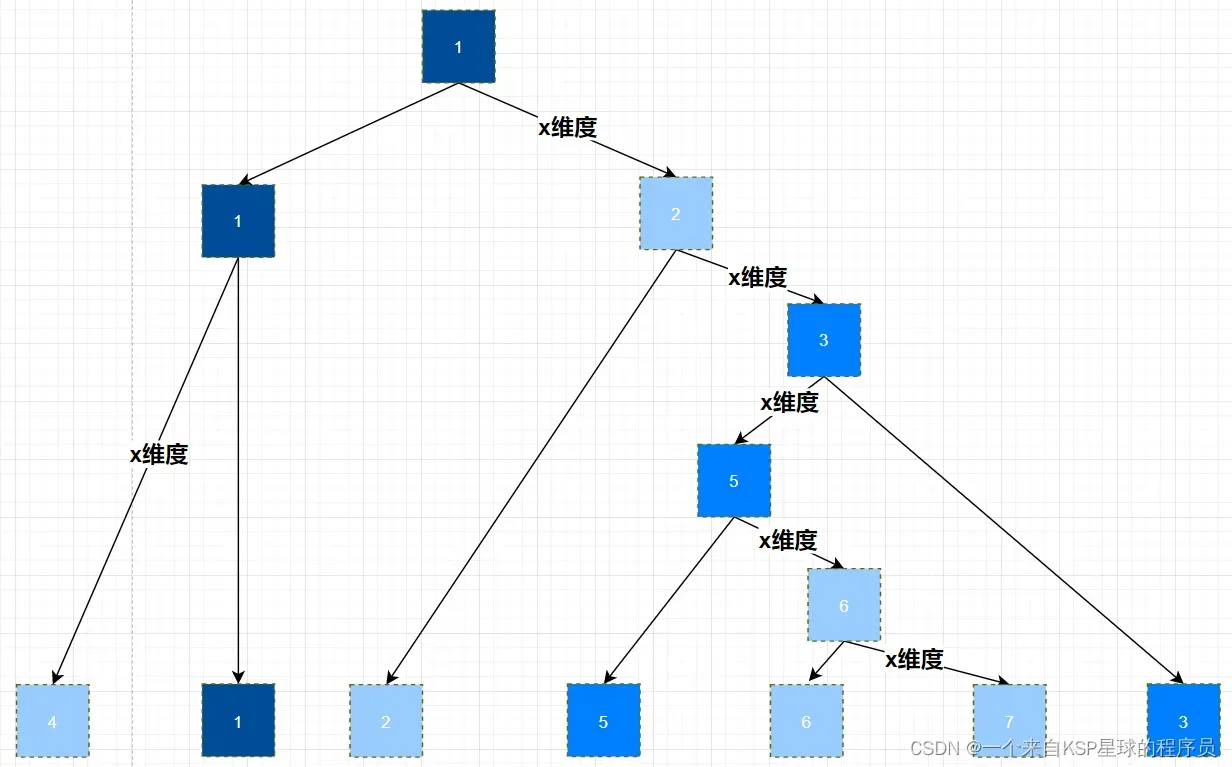
这里kd-tree的作用主要是在下一步聚类的时候,方便查找相邻的直方图,提高查找的效率。
6. 聚类统计结果
递归查找每个直方图周围9个固定距离(这里使用一个直方图边的尺寸作为距离)是否有包含粒子的直方图,如果有则聚为一类,关键实现函数是:pf_cluster_stats,示意图如下:
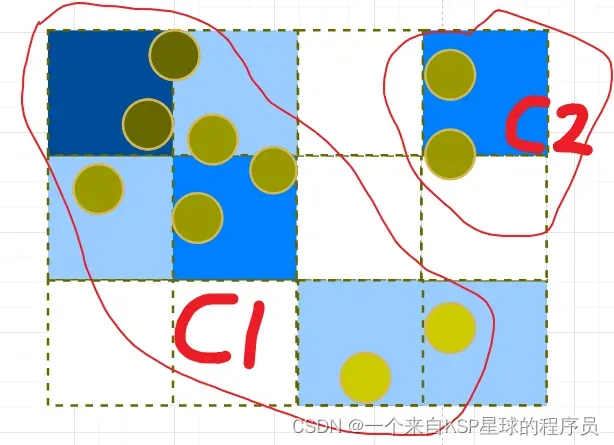
其中,明显可见c1为权重最高的类。再次变量粒子群,找到c1中的粒子(实现函数:pf_kdtree_get_cluster),取它们位姿的均值作为最终结果发布。
文章出处登录后可见!