ICP算法(Iterative Closest Points)
前言
ICP的目的:把不同坐标系中的点,通过最小化配准误差,变换到一个共同的坐标系中
配准:把匹配图像 配准到 参考图像的坐标系中
点云包括几何信息和非几何信息
点云数量非常巨大,并且含有噪声,所以需要滤波。滤波就是从带有噪声中提取有用的信息。
1)去除不能为匹配带来有用信息的点
2)点云进一步抽象,例如提取局部的法线信息或曲率
配准包括:粗配准、精配准
粗配准:大概配准,获得R和T的初值
精配准:不断迭代,计算最终的R和T。基本上使用ICP算法及其各种变种
拓展:
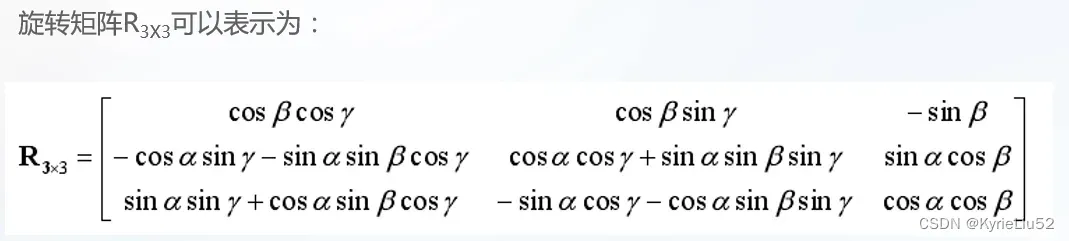
映射变换(三维)
R旋转矩阵、t平移向量、V透视变换向量、S比例因子
刚性变换矩阵中涉及到六个未知数α、β、γ、 tx、ty、tz。
要唯一确定这六个未知参数,需要六个线性方程,即至少需要在待匹配点云重叠区域找到3组对应点对,且3组对应点对不能共线,才可以得到这几个未知数的值,进而完成刚性矩阵的参数估计。
通常情况下,人们会选择尽可能多的对应点对,进一步提高刚性变换矩阵的参数估计精度。
问题引入
通过RGBD相机获取两组点云,在待匹配的两组点云数据的重叠区域内,选取两组点云,一组点云(源),相机经过位姿变换(旋转平移)之后拍摄第二组点云
(平移后)。
理论上,两者内部的点应该是一一对应的,比如(Ps0,Pt0)对应同一个点。
并且在存储的时候,按照顺序存储下标为i的像素。
在没有误差的情况下,计算出旋转R和平移t,可以将转换到
,转换公式为:
但由于噪声存在,以及匹配错误存在,上面的公式不一定对于所有的点都成立,所以存在误差。
ICP具体算法
1)核心:最小化一个目标函数,即上面提到的误差

2)寻找对应点: 我们现在并不知道有哪些对应点。因此,我们在有初值的情况下,假设用初始的旋转平移矩阵对source cloud进行变换,得到的一个变换后的点云。然后将这个变换后的点云与target cloud进行比较,只要两个点云中存在距离小于一定阈值,我们就认为这两个点就是对应点。称为最邻近点对
3)R、T优化: 有了对应点之后,我们就可以用对应点对旋转R与平移T进行估计。这里R和T中只有6个自由度,而我们的对应点数量是庞大的(存在多余观测值)。因此,我们可以采用最小二乘等方法求解最优的旋转平移矩阵
4)迭代: 我们优化得到了一个新的R与T,导致了一些点转换后的位置发生变化,一些最邻近点对也相应的发生了变化。因此,我们又回到了步骤2)中的寻找最邻近点方法。2)3)步骤不停迭代进行,直到满足一些迭代终止条件,如R、T的变化量小于一定值,或者上述目标函数的变化小于一定值,或者邻近点对不再变化等。
算法大致流程就是上面这样。
ICP流程
1.预处理:滤波、清洗数据
2.匹配:利用粗配准的估计矩阵,找最邻近点
3.加权:调整一些对应点对的权重
4.剔除不合理的对应点对
5.计算Loss
6.最小化Loss,求解当前最优变换
7.重复执行2-6,迭代直到收敛
这里的优化过程是一个贪心的策略。
首先固定R跟T利用最邻近算法找到最优的点对,然后固定最优的点对来优化R和T,依次反复迭代进行。
ICP算法的参数主要有两个:一个是ICP的邻近距离,另外一个是迭代的终止条件。
邻近距离:最初使用较大的对应点距离参数,然后逐步减小到一个较小的值
整体上看,ICP也把配准分成两个子问题:找最邻近点、找最优变换
找最邻近对应点(Find Closet Point)
利用初始 或上一次迭代得到的
, 对初始(源)点云进行变换,得到一个临时的变换点云,然后用这个点云和目标点云进行比较,找出源点云中每一个点在目标点云中的最近邻点。
如果直接进行比较找最近邻点,需要进行两重循环,计算复杂度为 ,这一步会比较耗时,常见的加速方法有:
- 设置距离阈值,当点与点距离小于一定阈值就认为找到了对应点,不用遍历完整个点集;
- 在目标点云中取点集
,找出源点云中的对应点集
,使得
- 注意,此处的ps为源点云变换后的临时变换点云
- 在目标点云中取点集
- 使用 ANN(Approximate Nearest Neighbor) 加速查找,常用的有 KD-tree;KD-tree 建树的计算复杂度为
O(N log(N)),查找通常复杂度为O(log(N))(最坏情况下O(N))。
KD-Tree
一种对k维空间中的实例点进行存储以便对其进行快速检索的树形数据结构,主要应用于多维空间关键数据的搜索
k-d树是每个节点都为k维点的二叉树
所有的非叶子节点,都可以看做是一个超平面,把空间分割为两个半空间,左子树为超平面左边的点,右子树为超平面右边的点。
BSPTree(Binary space partitioning tree,空间二分树)
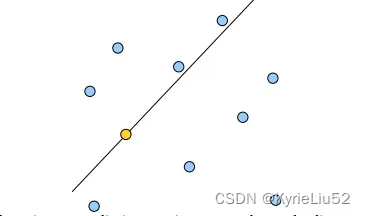
KDTree就是超平面都垂直于轴的BSPTree
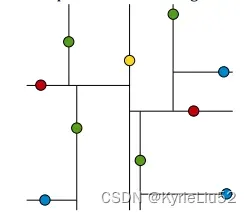
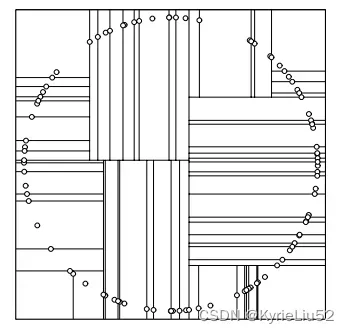
上面的数据集用KDTree划分后为:
创建kd树
kd树的数据结构
Node-data – 数据矢量, 数据集中某个数据点,是n维矢量(这里也就是k维)
Range – 空间矢量, 该节点所代表的空间范围
split – 整数, 垂直于分割超平面的方向轴序号
Left – k-d树, 由位于该节点分割超平面左子空间内所有数据点所构成的k-d树
Right – k-d树, 由位于该节点分割超平面右子空间内所有数据点所构成的k-d树
parent – k-d树, 父节点
建立树最大的问题在于轴点(pivot)的选择,选择好轴点之后,树的建立就和BSTree差不多了。
建树必须遵循两个准则:
1.建立的树应当尽量平衡,树越平衡代表着分割得越平均,搜索的时间也就是越少。
2.最大化邻域搜索的剪枝机会。
轴点选取策略:(从垂直哪个轴的超平面切割、切割点在哪)
1.median of the most spread dimension pivoting strategy
对于所有描述子数据(特征矢量),统计他们在每个维度上的数据方差,挑选出方差中最大值,对应的维就是split域的值。数据方差大说明沿该坐标轴方向上数据点分散的比较开。这个方向上,进行数据分割可以获得最好的平衡。数据点集Data-Set按照第split维的值排序,位于正中间的那个数据点 被选为轴点。
这种方法容易形成:
3.随着树的深度,轮流选择轴作为分割面(例如:在三维空间中根节点是 x 轴垂直分割面,其子节点皆为 y 轴垂直分割面,其孙节点皆为 z 轴垂直分割面,其曾孙节点则皆为 x 轴垂直分割面,依此类推。)也是选中某纬度的中间节点作为轴点
选择中间节点进行划分,会产生一个平衡的kd树,但是平衡的树不一定对每个应用都是最佳的
最近邻搜索
找出在树中与输入点最接近的点
过程:
-
从根节点开始,递归的往下移。往左还是往右的决定方法与插入元素的方法一样(如果输入点在分区面的左边则进入左子节点,在右边则进入右子节点)。
-
一旦移动到叶节点,将该节点当作”当前最佳点”。
-
回溯搜索路径,并判断搜索路径上节点的其他子结点中是否可能有距离更近的点,如果有可能,就要对另一个子结点进行最近邻搜索
-
如何判断?
-
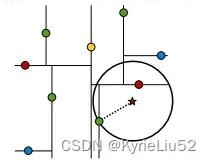
-
以查询点为圆心,以当前的最近距离为半径画圆,这个圆称为候选超球(candidate hypersphere),如果圆与回溯点的轴相交(也就是star点到红点切割轴的距离,小于star点和当前最佳点的距离),则认为其他子结点中可能有更近的点
-
个人对相交的理解:与当前最佳点的距离,比距离划分轴的距离还要远,说明轴的另一边有可能存在更近的点。
-
例子(不可能和可能两种情况):
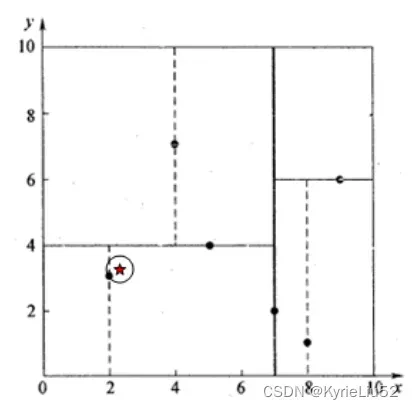
- 当搜索路径为空时(向下搜索时,路过节点加入搜索路径;向上回溯时,路过节点从搜索路径中剔除),完成最邻近搜索。
求解最优变换(Find Best Transform)
对于 point-to-point ICP 问题,求最优变换是有闭形式解(closed-form solution)的,可以借助 SVD 分解来计算。
给出结论,在已知点的对应关系的情况下,
设 ,
分别表示源点云和目标点云的质心
令 ,
令 ,这是一个 3×3 矩阵,对 H 进行 SVD 分解得到
,则 point-to-point ICP 问题最优旋转为:
最优平移为:
下面分别给出证明。
计算最优平移
令,设损失函数为
,求导可得
当导数为0时,最优,损失最小
计算最优旋转
经过最优平移的推导,我们知道无论旋转如何取值,都可以通过计算点云的质心来得到最优平移
因此,为了计算方便,不考虑平移的影响,将源点云和目标点云都转换到质心坐标下,这就是之前为什么让 ,
。
转化之后,我们不考虑平移,损失函数为:
化简:
拓展:向量的二范数为每个元素平方求和,且||v|| = v^T*v
可以证明对于旋转矩阵R,
同时,标量的转置等于自身,即
由于点的坐标都是确定的,也就是不变,所以最小化Loss就是最小化带R的那一部分,即:
即:
我们可以得到:
其中表示所有的点的
,trace表示求矩阵的迹,trace中的三个矩阵为Nx3,3×3,3xN,相乘结果为NxN的矩阵,只有对角线上式对应某点的
。
所以问题转化为(问题向量化?):
根据trace(AB)=trace(BA):
之前令 ,即
,并对H进行SVD分解可以得到
其中V、R、U都是正交矩阵,所以也是正交矩阵。
令,则:
SVD拓展:一个mxn的矩阵A,分解为
,
SVD分解之后,
UV均为单位正交阵
根据奇异值非负的性质和正交矩阵的性质,容易证得只有当 M 为单位阵时 trace(ΣM) 最大,即:
所以最优的R为:
最后还需要进行 Orientation rectification,即验证 R∗ 是不是一个旋转矩阵(检查是否有 |R|=1)
因为存在 |R|=−1 的可能,此时 R 表示的不是旋转而是一个 reflection,所以我们还要给上述优化求解加上一个 |R|=1 的约束。
在该约束下,M的行列式为:
如果,则
,此时
就是最优解。
如果,则
,我们需要求解此时的R,也就是求解
时 什么样的M能让trace(ΣM)最大。 https://www.math.pku.edu.cn/teachers/yaoy/Fall2011/arun.pdf(详细讨论),链接中的结论为:让trace(ΣM)最大的M为:
将上面两种情况综合起来:
可以保证最优的R*行列式始终为1
总结:最优变换步骤
- 计算源点云和目标点云质心;
- 将源点云和目标点云转换到质心坐标系;
- 计算矩阵 H(形式类似“协方差矩阵”);
- 对 H 求 SVD 分解,根据公式求得 R∗;
- 根据公式计算 t∗。
ICP算法关键点:
(1)原始点集的采集
均匀采样、随机采样和法矢采样
(2)确定对应点集
点到点、点到投影、点到面
(3)计算变化矩阵
四元数法、SVD奇异值分解法
迭代
每一次迭代都会得到当前的最优变换参数
然后把这个变换作用于源点云,产生新的临时变换目标点云,继续找源点云和目标点云之间的最近对应点
“找最近对应点”和“求解最优变换”这两步不停迭代进行,
直到满足迭代终止条件(阈值判断),常用的终止条件有:
的变化量小于一定值
- loss 变化量小于一定值
- 达到最大迭代次数
优缺点和改进
ICP 优点:
- 简单,不必对点云进行分割和特征提取
- 初值较好情况下,精度和收敛性都不错
ICP 缺点:
- 找最近对应点的计算开销较大
- 只考虑了点与点距离,缺少对点云结构信息的利用
原始的 ICP 算法采用最小二乘估计变换矩阵,原理简单,精度较好,但是由于采用迭代计算,计算开销大,速度较慢,对初始变换敏感(依赖于初始的变换,初始变换找的好坏,会很大程度影响结果),容易陷入局部最优解。
原始的ICP可以看做为Point-to-Point ICP
自 ICP 提出以来,有相当多的 ICP 改进算法
- Point-to-Plane ICP,原始 ICP 算法的代价函数中使用的 point-to-point 距离,point-to-plane 则是考虑源顶点到目标顶点所在面的距离,比起直接计算点到点距离,考虑了点云的局部结构,精度更高,不容易陷入局部最优;但要注意 point-to-plane 的优化是一个非线性问题,速度比较慢,一般使用其线性化近似;
- Plane-to-Plane ICP,point-to-plane 只考虑目标点云局部结构, plane-to-plane 顾名思义就是也考虑源点云的局部结构,计算面到面的距离;
- Generalized ICP (GICP),综合考虑 point-to-point、point-to-plane 和 plane-to-plane 策略,精度、鲁棒性都有所提高;
- Normal Iterative Closest Point (NICP),考虑法向量和局部曲率,更进一步利用了点云的局部结构信息,其论文中实验结果比 GICP 的性能更好。
注意事项
- ICP 比较依赖于变换初值,平移比较简单,直接用点云质心来估计;旋转初值的话可以手动调一个粗略值,或者沿每个轴的旋转进行采样、组合来尝试(不适合实时性应用);
- 点太多的话可以先降采样;
- 找到一些 anchor 点对(比如先用特征点匹配),可以帮助加速收敛;
- 对应用场景引入一些合理假设,比如限制旋转、平移的范围,变换自由度数量等。
ICP变种
普通的ICP在计算点与点之间的误差、代价函数时,使用点对点的距离作为误差。
PL-ICP(Point-to-Line):
相对于PP-ICP最大的区别就是改进了误差方程。
将点对点的距离 改成 点到其最近两个点连线的距离。精度更高。
Point-to-Plane ICP
误差方程中考虑的是源顶点到目标顶点所在面的距离,考虑目标点云的局部结构
Plane-to-Plane ICP,
point-to-plane 只考虑目标点云局部结构, plane-to-plane 顾名思义就是也考虑源点云的局部结构,计算面到面的距离;
GICP(Generalized ICP )
综合考虑 point-to-point、point-to-plane 和 plane-to-plane 策略,精度、鲁棒性都有所提高;
NICP(Normal)
考虑在误差方程中加入法向量和曲率
粗配准
ICP算法的基本原理。它需要一个旋转平移矩阵的初值。这个初值如果不太正确,那么由于它的greedy优化的策略,会使其目标函数下降到某一个局部最优点(当然也是一个错误的旋转平移矩阵)。因此,我们需要找到一个比较准确的初值,这也就是粗配准需要做的。
粗配准目前来说还是一个难点。针对于不同的数据,有许多不同的方法被提出。
配准的评价标准:
比较通用的一个是LCP(Largetst Common Pointset)
给定两个点集P,Q,找到一个变换T§,使得变换后的P与Q的重叠度最大。
在变换后的P内任意一点,如果在容差范围内有另外一个Q的点,则认为该点是重合点。
重合点占所有点数量的比例就是重叠度。
解决上述LCP问题,最简单粗暴的方法就是遍历。
假设点集P,Q的大小分别为m,n。
而找到一个刚体变换需要3对对应点。那么brute force 搜索的需要
的复杂度。对于动辄几百万个点的点云,这种时间复杂度是不可接受的。
因此,许多搜索策略被提出。
搜索策略
比较容易想到的是RANSAC之类的搜索方法。而对于不同的场景特点,可以利用需配准点云的特定信息加快搜索。(例如知道点云是由特定形状的面构成的)这里先介绍一个适用于各种点云,不需要先验信息的搜索策略,称为4PC(4 Point Congruent)。
4PC(4 Point Congruent):
4PC搜索策略是在P,Q中找到四个共面的对应点。
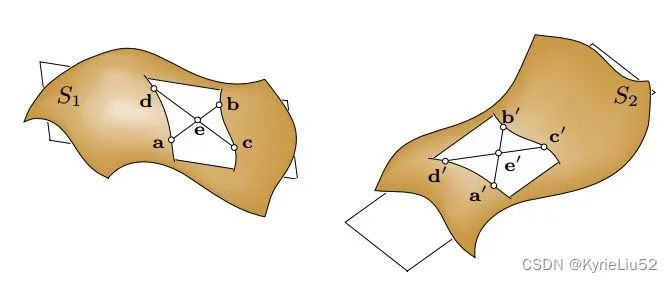
有两个比例在刚体变化下是不变的。 和
(实际上在仿射变换下也是不变的。)
4PC将对于三个点的搜索转换为对e,e’的搜索,从而将复杂度降低到了。这四个点的距离越远,计算得到的转换越稳健。但是这里的四个点的搜索依赖于两个点云的重叠度。
4PC算法通用性较好,但是对于重叠度较小、或是噪声较大的数据也会出现配准错误或是运行时间过长的问题。
具体的算法:4-Points Congruent Sets for Robust Pairwise Surface Registration
参考:
https://www.zhihu.com/question/34170804
文章出处登录后可见!