刚跑完步回来,趁着思路比较清晰,再写一篇吧,平时工作比较忙,也只能趁着周末空余时间写写。上一篇主要讲述的CN跟踪算法,这一篇写写KCF跟踪算法。
1.KCF跟踪算法的主要思想
KCF是一种鉴别式追踪方法。在跟踪目标的过程中训练一个回归器,该回器能计算一个小窗口采样的响应。利用该回归器去计算下一帧预测位置附近的采样点响应,响应最强的采样点为目标位置。
2.KCF跟踪算法的原理
该算法的岭回归函数表达式为:
将 w 用样本的线性组合来表示为:
上面的方程最优化下的变量不再是 w ,而是 α ,可通过最小二乘法求解。

对上式求导,并令导函数为0,可求得:
![]()
以上可以归结为训练分类器,KCF跟踪算法还包括目标检测,其计算响应的公式如下:
其中 κ(z,xi) 为核函数,令 Kz 为训练样本与待测样本之间的核空间的核矩阵 。,因为 Kz 是循环矩阵,根据循环矩阵的性质,可将上面的方程化简为:
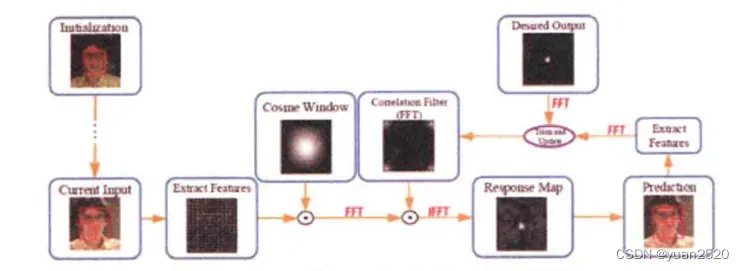
基本框架大概可以总结为:首先初始化输入,然后对当前输入进行特征提取,再进行加窗处理和相关滤波后得到当前响应。 通过响应来预测下一个时刻目标的位置,并对目标位置进行特征提取,并利用得到的结果来更新训练集
3.KCF跟踪算法的优缺点
优点:利用循环矩阵可以傅氏对角化的性质大大降低了分类器训练和检测过程中的运算量。
缺点:当目标受尺度变化、严重遮挡、相似目标干扰和出视野等因素影响时,KCF算法仍会出现目标丢失现象, 一旦目标跟踪丢失,就很难恢复目标跟踪。
文章出处登录后可见!
已经登录?立即刷新