目录
1、开源分享
今天终于完成了毕设项目的落地和算法实现,比较感叹这里面的坑,不仅仅是Linux、ROS,还有stm32、树莓派4B,控制,麦克纳姆轮等等一系列的坑。从一年前学SLAM到现在,由于实验室只有我在搞这个东西,所以基本上从0到落地,借助了群众的智慧,终于做成了。
比较感慨,新开一篇专栏:SLAM与导航实战(毕设开源分享)进行所有源码,过程等进行开源,后期改好的镜像和项目会放在Github和Gitee上。(大概5月底开始整理更新)
(由于车子为单雷达传感器,所以实车落地改为Hector和Cartographer算法)
本专栏主要包含:
(1)麦克纳姆轮运动解算,布置。
(2)底盘,客制化硬件开源(CAD、SolidWors自画硬件)。
(3)Gazebo、rviz联合算法仿真。
(4)Gmappping、Hector、Cartographer算法原理。
(5)Gmappping、Hector、Cartographer代码结构。
(6)树莓派4B与底盘通信控制全向运动。
(7)实现ROS节点键控底盘全向运动。
(9)手持雷达Hector、Cartographer建图。(开源改好的Workspace,含使用文档注释)
(10)移植Hector、Cartographer建图,小车实现。
(11)配置ROS分布式通信。(虚拟机+PC)
(12)实现自主导航建图功能。
(13)全局路径规划算法整理。
(14)Dijkstra算法仿真与实车实现。
(内容比较多,5月后还要配第二台多传感融合车,所以更新比较慢,见谅……)
2、建图结果
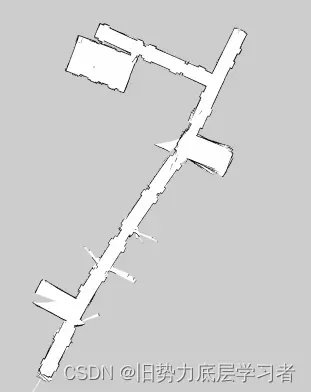
2.1 多观测点环境结果:
Hector-SLAM:
Cartographer-SLAM:

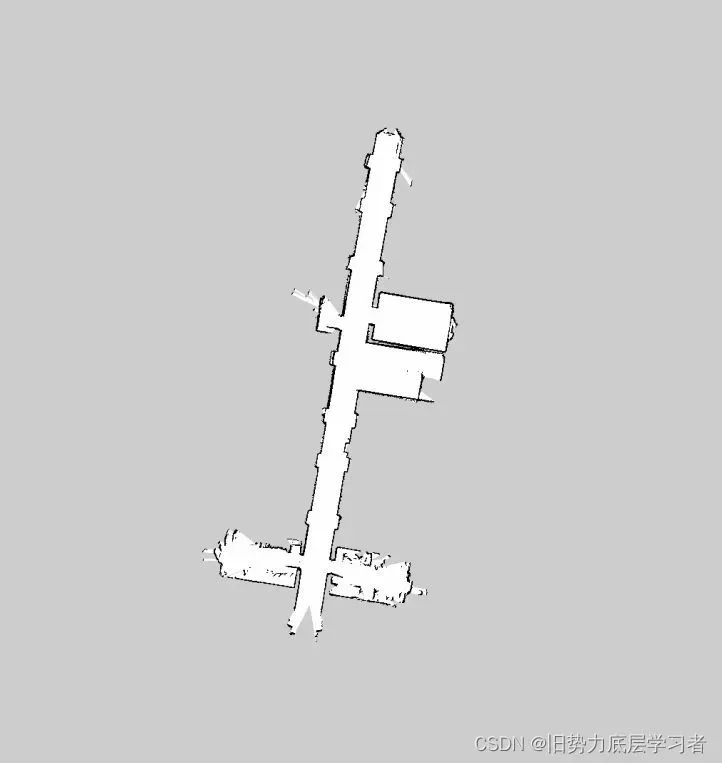
2.2 长廊环境建图结果:
Hector-SLAM:
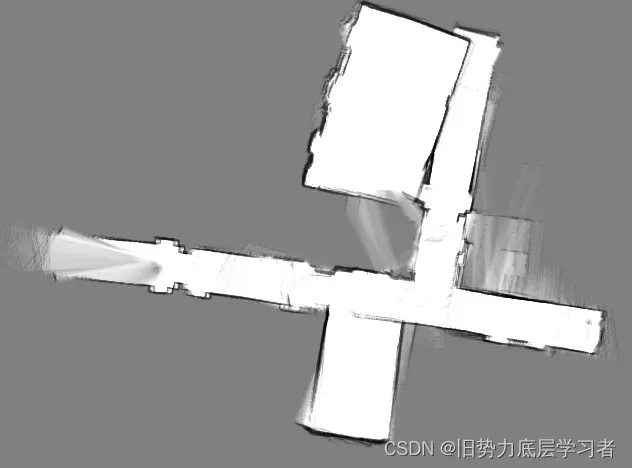
Cartographer-SLAM(单激光下长廊环境中,回环检测雷达粒子太严重就这样):
文章出处登录后可见!