


交互式多模型IMM算法实现难点——模型维数不同
原创不易,路过的各位大佬请点个赞
针对机动目标跟踪的探讨、技术支持欢迎联系,也可以站内私信
WX: ZB823618313
基于IMM机动目标跟踪算法设计最重要的核心部分主要包括:
- IMM框架
- 滤波器选择:(这里基于UKF)
- 目标运动模型:(这里基于CV CT)
1. 难点分析
针对机动目标跟踪问题,如果交互式多模型IMM框架、如模型转移概率、模型集合以及模型概率初始等确定时,IMM算法的实现(设计)主要存在两大难点:
1- 非线性滤波器的选择和集成
2- 模型集合多样、不统一
在IMM算法设计中,模型多样最直接的一个问题就是戈尔戈模型的状态维数不同,而IMM 的总体(混合)估计却只存在一个统一的状态维数,因此这就导致了很多模型组合不能直接适用于IMM 算法中。
以二维目标为例,CV模型的状态维数4,而CA模型的状态维数6,CT模型的状态维数存在两种情形4和5,singer模型状态维数为6,Jerk模型的状态维数为8,等等。这直接导致IMM滤波器状态失配。
2. 设计思路/解决方案
以典型组合
模型1:匀速运动CV(4维)
模型2:匀速转弯运动CT(4维)
模型3:匀加速运动CA(6维)
为例,进行分析。
其它不同维数的模型组合可以基于该思想,很容易的推广。哈哈哈哈哈哈啊哈哈哈,一学就会,…
2.1 CV模型: 

其中
定义矩阵
2.2 CT模型:
其中
或者为(两种形式都可以用,下面一代码形式给出)
Qk= q2*[2*(w1*T-sin(w1*T))/w1^3 0 (1-cos(w1*T))/w1^2 (w1*T-sin(w1*T))/w1^2 ;
0 2*(w1*T-sin(w1*T))/w1^3 -(w1*T-sin(w1*T))/w1^2 (1-cos(w1*T))/w1^2 ;
(1-cos(w1*T))/w1^2 -(w1*T-sin(w1*T))/w1^2 T 0 ;
(w1*T-sin(w1*T))/w1^2 (1-cos(w1*T))/w1^2 0 T;];
定义矩阵
2.3 CA模型 :
其中
Qk3=q3^2*[T^5/20 0 T^4/8 0 T^3/6 0;
0 T^5/20 0 T^4/8 0 T^3/6;
T^4/8 0 T^3/3 0 T^2/2 0;
0 T^4/8 0 T^3/3 0 T^2/2;
T^3/6 0 T^2/2 0 T 0
0 T^3/6 0 T^2/2 0 T];
定义矩阵
2.4 IMM滤波器状态维数设计
滤波状态设计为:
目标真实航迹生成方程:
第一阶段:
第二阶段:
第三阶段:
代码:
%% 产生真实轨迹
for k=1:t1
X=Fk_cv*X+Gk_cv*sqrtm(Qk1)*randn(4,1); %产生真实轨迹
X_true(:,k,index)=X;
end
for k=t1+1:t2
X=Fk_ct*X+Gk_ct*sqrtm(Qk2)*randn(4,1);
X_true(:,k,index)=X;
end
for k=t2+1:steps
X=Fk3*X+Gk_ca*sqrtm(Qk3)*randn(6,1);
X_true(:,k,index)=X;
end
这样目标状态统一为
6维,实际上在CV和CT运动模型中, 和 最后两行均为0,因此CVCT模型对加速并没有产生任何作用,加速度的引入只是为了满足状态维数。 同样,
和 最后两行均为0,为6×4的矩阵,为了让CVCT的4路噪声满足6维状态。
存在的问题:这样用0对齐维数,直接导致CV和CT的过程噪声方差奇异、进而导致滤波估计协方差奇异,使得矩阵分解失败、没办法产生采样点。(目标大多数非线性滤波器都是基于矩近似的采样滤波,e.g.,UKF,CKF,DDF,QKF…)
2.5 IMM各模型滤波器设计
思路:采用变维思想。针对不同模型的局部滤波器,只对该模型真实包含的状态进行滤波更新,其余状态保持不变。
CV模型局部滤波:
注意:滤波中采用的参数矩阵为
CT模型局部滤波:
注意:滤波中采用的参数矩阵为
CA模型局部滤波:
注意:滤波中采用的参数矩阵为
代码实现:
%filer1
[xk_UKF1,Pk_UKF1,A_UKF1] = fun_2UKF_cvct(X_update_hat1,P_update_hat1,Fk1,Gk1,Z_true(:,k,index),Qk1,sigma_r,sigma_b,xp(:,1));
%filer2
[xk_UKF2,Pk_UKF2,A_UKF2] = fun_2UKF_cvct(X_update_hat2,P_update_hat2,Fk2,Gk2,Z_true(:,k,index),Qk2,sigma_r,sigma_b,xp(:,1));
%filer3
[xk_UKF3,Pk_UKF3,A_UKF3] = fun_2UKF(X_update_hat3,P_update_hat3,Fk3,Gk3,Z_true(:,k,index),Qk3,sigma_r,sigma_b,xp(:,1));
3. IMM-UKF仿真实现
3.1. 仿真参数
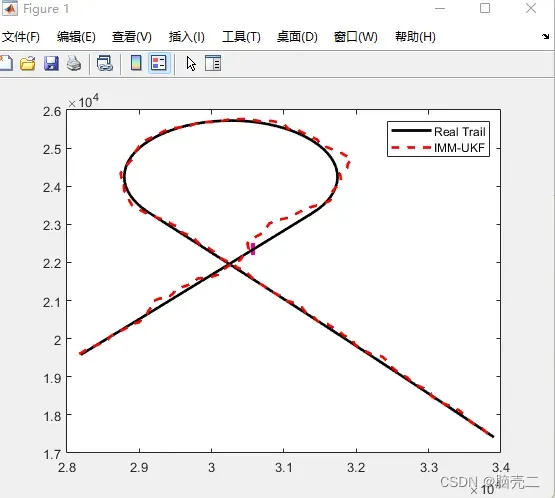
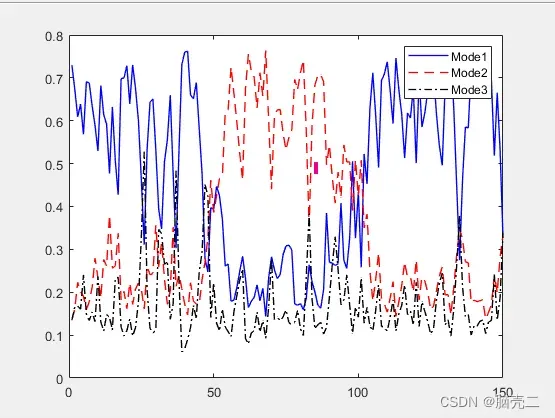
一、目标模型:CV CT CA
第一阶段:1:39s,匀速运动CV
第二阶段:40:91s,匀速圆周运动CT,角速度:
第三阶段:92:150s,匀加速运动CA
t1=39; t2=91; t3=steps;
%% 产生真实轨迹
for k=1:t1
X=Fk_cv*X+Gk_cv*sqrtm(Qk1)*randn(4,1); %产生真实轨迹
X_true(:,k,index)=X;
end
for k=t1+1:t2
X=Fk_ct*X+Gk_ct*sqrtm(Qk2)*randn(4,1);
X_true(:,k,index)=X;
end
for k=t2+1:steps
X=Fk3*X+Gk_ca*sqrtm(Qk3)*randn(6,1);
X_true(:,k,index)=X;
end
二、测量模型:2D主动雷达
在二维情况下,雷达量测为距离和角度
其中
三、性能评估
RMSE(Root mean-squared error):蒙塔卡罗次数
ANEES(average normalized estimation error square),
3.2. 跟踪轨迹

3.3. 位置/速度RMSE


4.4. 模型概率



4.5. 部分代码
原创不易,路过的各位大佬请点个赞
文章出处登录后可见!