批归一化
数据的规范化也即 可以将数据的不同特征规范到均值为0,方差相同的标准正态分布,这就可以避免大数造成得数据溢出。可以使网络以更高得学习率更快得收敛。
如果仅仅对输入的图片进行归一化,后面其余网络层的输出不进行相关操作,那么随着网络深度得增加,数据得分布会逐渐偏离标准正态分布,由于梯度得反向传播是不同层得梯度不断相乘得结果,数据过小或过大容易造成梯度消失或梯度爆炸。
为了解决上述问题,有人提出了对网络层的中间输出进行规范化得方法,也就是批规范化(Batch Normalization),对某个网络层的批规范化,通常是在加权和与激活函数运算之间进行的。也就是:
但是如果将
规范到
的标准正态分布,那么无论前面的网络如何变化,经过这个这个层后都将服从标准正态分布,批规范化引入了可学习的参数
,将规范到
的标准正态分布变换到
由于
是可学习的,所以就避免了模型能力降低的问题:
其中
BN和卷积层融合
在图像处理过程中,BN经常用于卷积之后,可以考虑将两个融合在在一起 ,简单点就是将是合二为一(融合层通常用测试阶段)。那么合二为一新的网络层的网络权重和偏置该怎么初始化呢?根据卷积层和BN层的相关参数进行计算得到新的权重和偏置,公式入下:
简化公式结构为.
其中
为卷积层的权重和偏置,
为
层的权重、偏置、
对应的参数
pytorch代码
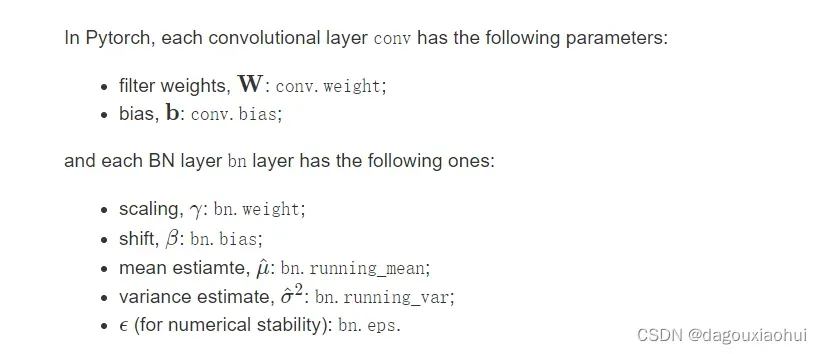
pytorch 中 Conv2 和 BN 层中参数的的具体意义
import torch
def fuse_conv_and_bn(conv, bn):
# 初始化
fusedconv = torch.nn.Conv2d(
conv.in_channels,
conv.out_channels,
kernel_size=conv.kernel_size,
stride=conv.stride,
padding=conv.padding,
bias=True
)
w_conv = conv.weight.clone().view(conv.out_channels, -1)
w_bn = torch.diag(bn.weight.div(torch.sqrt(bn.eps+bn.running_var)))
# 融合层的权重初始化(W_bn*w_conv(卷积的权重))
fusedconv.weight.copy_( torch.mm(w_bn, w_conv).view(fusedconv.weight.size()) )
if conv.bias is not None:
b_conv = conv.bias
else:
b_conv = torch.zeros( conv.weight.size(0) )
b_bn = bn.bias - bn.weight.mul(bn.running_mean).div(torch.sqrt(bn.running_var + bn.eps))
# 融合层偏差的设置
fusedconv.bias.copy_( torch.matmul(w_bn, b_conv) + b_bn )
return fusedconv
那么,融合层计算出来的结果和分层计算出来的结果有多大差距呢??从下面代码可以看到用人家预训练好的相关参数进行融合,融合层和分层计算得出的结果所差无几嘛。
import torchvision
torch.set_grad_enabled(False)
x = torch.randn(32, 3, 256, 256) # batch,channel,w,h
rn18 = torchvision.models.resnet18(pretrained=True)
rn18.eval()
net = torch.nn.Sequential(
rn18.conv1,
rn18.bn1
)
y1 = net.forward(x)
fusedconv = fuse_conv_and_bn(net[0], net[1])
y2 = fusedconv.forward(x)
# torch.norm()是求范数,没有指定维度则是对所有元素求二范数
d = (y1 - y2).norm().div(y1.norm()).item()
print("error: %.8f" % d)
>>>error: 0.00000022
那么问题又出来了,既然所查无几,为什么要费劲的去融合他呢,那我们再想想深度网络运行时间是不是我们担心的问题呢,走起,去验证一下时间上有无改进吧。
这里就假设一次输入32张图片,测试了300次。可以看出,在速度提升上还是蛮大的。
def cal_time(fun):
def inner(*args,**kwargs):
t1 = time.time()
fun(*args,**kwargs)
t2 = time.time()
print(f"运行时间:{t2-t1}")
return inner
@cal_time
def main(net,x):
for i in tqdm(range(300)): # 假设一次输入32张图片,测试了300次。
y = net.forward(x)
main(net,x)
main(fusedconv,x)
>>>93.39383339
>>>69.93862175
那么事在训练的时候融合还是测试的时候融合呢,那肯定是用在测试阶段,前面说过融合层的权重和偏置要根据训练好的卷积、BN层的参数确定。这样测试阶段使用融合后的网络进行推理就可以加快推理速度。对于有些实时检测场所,速度越快岂不是更好。
参考链接: Fusing batch normalization and convolution in runtime
小白一枚,如果有问题,希望大家提出来。谢谢。
文章出处登录后可见!