终于把相关滤波的目标跟踪算法写完了,其实还有其他的相关滤波算法,暂时也不写了。从今天开始写写深度学习跟踪算法,其实不太想写深度学习跟踪算法,担心写不好,挺复杂的,写不好莫要见怪哈。这一篇主要写写深度学习跟踪算法中的C-COT的目标跟踪算法。
1.什么是C-COT目标跟踪算法
C-COT目标跟踪算法,即连续域卷积操作跟踪算法,目前主流的相关滤波器跟踪方法之一,其特点在于,不需要重采样即可整合多分辨率 的特征,且预测分数是连续域函数。
2.C-COT目标跟踪算法的原理
C-COT目标跟踪算法比较复杂,主要步骤为:
(1)构造连续域插值函数;
(2)构造置信函数;
(3)期望泛函;
(4)训练连续分类器;
(5)正规方程的构造
构造连续域插值函数,这一步一般主要定义一个图像的训练样本,构造差值函数,可以用方程表示为:

式中,bd 是差值函数,t是连续域变量,T是连续域支撑空间长度。
构造置信函数,这一步主要是定义卷积算子,可以表示为:
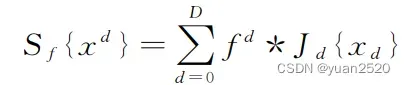
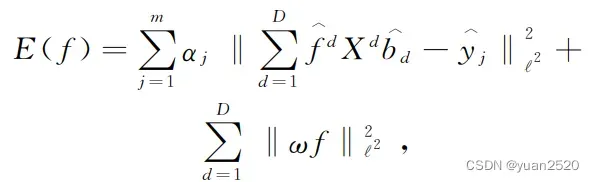
期望泛函,这一步主要构造损失函数,可以表示为:

权重αj ≥0控制着每个训练样本的影响力,惩罚系数ω由特征点在整幅图像中的位置决定。
训练连续分类器,这一步主要通过最小化损失函数进行分类器训练。其对应的算法方程可表示为:
最后,进行正规方程的构造,可表示为:

方程中AH ΓA+WHW为对称正定方程,可以用共轭梯度迭代法求解。
3.C-COT目标跟踪算法的优缺点
优点:可实现更精确的亚像素级别定位。
缺点:如使用深度网络所提取的特征会导致算法跟踪速度很慢,以及采用网格搜索的方法使得跟踪结果容易陷入局部最优值。
好了,今天写到这,有点伤脑。
文章出处登录后可见!
已经登录?立即刷新