深度滤波器推导
测量不确定性
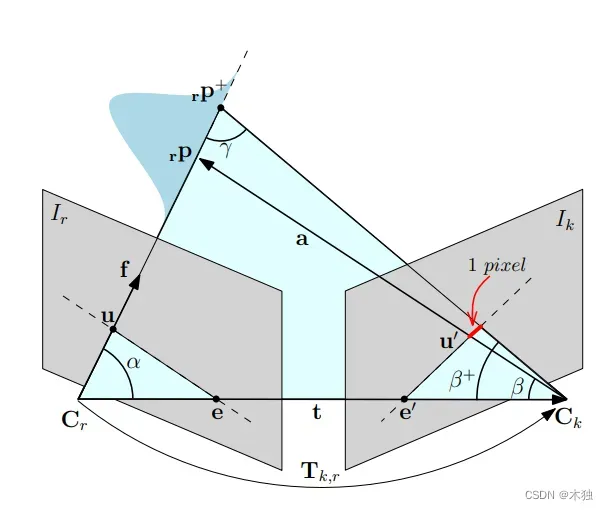
图像与
对应的相机中心分别为
。二者的转换关系为
,并且平移距离为
, 估计场景中的3d点为
.假设匹配误差为一个像素,得到的误差距离为
。
因此有:
角度
因此得到,
最终得到测量不确定度为
代码分析
基本就是一条条公式对应过来
double DepthFilter::computeTau(
const SE3& T_ref_cur,
const Vector3d& f,
const double z,
const double px_error_angle)
{
Vector3d t(T_ref_cur.translation());
Vector3d a = f*z-t;
double t_norm = t.norm();
double a_norm = a.norm();
double alpha = acos(f.dot(t)/t_norm); // dot product
double beta = acos(a.dot(-t)/(t_norm*a_norm)); // dot product
double beta_plus = beta + px_error_angle;
double gamma_plus = PI-alpha-beta_plus; // triangle angles sum to PI
double z_plus = t_norm*sin(beta_plus)/sin(gamma_plus); // law of sines
return (z_plus - z); // tau
}
深度滤波器
采用高斯分布与均匀分布叠加的概率密度函数表达深度信息的分布。
- 好处:提高算法对于错误匹配的鲁棒性
- 坏处:公式推导过程复杂,实现计算量稍大

包含四个参数分别为高斯分布的与均匀分布的
。
迭代更新过程
已知:
上一次的概率分布
当前的测量值
求解更新后的概率分布
计算过程
这里的代表高斯分布
在
位置的概率分布,同理
为均匀分布在x位置处的概率。
更新概率分布
更新均匀分布
代码分析
基本能和上面的公式对应起来
void DepthFilter::updateSeed(const float x, const float tau2, Seed* seed)
{
float norm_scale = sqrt(seed->sigma2 + tau2);
if(std::isnan(norm_scale))
return;
boost::math::normal_distribution<float> nd(seed->mu, norm_scale);
float s2 = 1./(1./seed->sigma2 + 1./tau2);
float m = s2*(seed->mu/seed->sigma2 + x/tau2);
float C1 = seed->a/(seed->a+seed->b) * boost::math::pdf(nd, x);
float C2 = seed->b/(seed->a+seed->b) * 1./seed->z_range;
float normalization_constant = C1 + C2;
C1 /= normalization_constant;
C2 /= normalization_constant;
float f = C1*(seed->a+1.)/(seed->a+seed->b+1.) + C2*seed->a/(seed->a+seed->b+1.);
float e = C1*(seed->a+1.)*(seed->a+2.)/((seed->a+seed->b+1.)*(seed->a+seed->b+2.))
+ C2*seed->a*(seed->a+1.0f)/((seed->a+seed->b+1.0f)*(seed->a+seed->b+2.0f));
// update parameters
float mu_new = C1*m+C2*seed->mu;
seed->sigma2 = C1*(s2 + m*m) + C2*(seed->sigma2 + seed->mu*seed->mu) - mu_new*mu_new;
seed->mu = mu_new;
seed->a = (e-f)/(f-e/f);
seed->b = seed->a*(1.0f-f)/f;
}
理论推导
深度滤波器的公式实现较为简单,但是具体的理论推导较为繁琐,因此放在最后没有特别高的需求的可以直接用上面的结论和代码,而不需要过分深究推导过程。
推导过程分为两步
- 证明分布后验分布的近似表达形式,即
- 推导迭代公式
后验分布的参数近似
参数更新公式
已知:
- 当前分布
- 新测量值
其中为gamma函数[1],存在如下性质
因此得到性质如下
此外,推导过程中用到高斯分布乘积的性质如下[2]:
设有高斯分布及
,则
其中,
得到后验分布为:
将常量替换成单一变量
得到如下分布
计算对变量求一阶矩和二阶矩
计算对变量求一阶矩和二阶矩
最后化简即得到更新公式。
参考资料
[1] Gamma 函数 https://zh.m.wikipedia.org/wiki/%CE%93%E5%87%BD%E6%95%B0
[2] 高斯分布的乘积推导 https://www.zhihu.com/question/46458824
文章出处登录后可见!
已经登录?立即刷新