Pytorch从零构建ResNet
第一章 从零构建ResNet18
前言
-
ResNet 目前是应用很广的网络基础框架,所以有必要了解一下,并且resnet结构清晰,适合练手
-
pytorch就更不用多说了。(
坑自坑) 懂自懂 -
本文使用以下环境构筑
torch 1.11 torchvision 0.12.0 python 3.9
一、ResNet是什么?
深度残差网络(Deep residual network, ResNet)的提出是CNN图像史上的一件里程碑事件,具体多牛,大家自己某度咯。ResNet的作者何恺明也因此摘得CVPR2016最佳论文奖,当然何博士的成就远不止于此,感兴趣的也可以去搜一下他后来的辉煌战绩。下面简单讲述ResNet的理论及实现。
1. 残差学习
深度网络的退化问题至少说明深度网络不容易训练。但是我们考虑这样一个事实:现在你有一个浅层网络,你想通过向上堆积新层来建立深层网络,一个极端情况是这些增加的层什么也不学习,仅仅复制浅层网络的特征,即这样新层是恒等映射(Identity mapping)。在这种情况下,深层网络应该至少和浅层网络性能一样,也不应该出现退化现象。
这个有趣的假设让何博士灵感爆发,他提出了残差学习来解决退化问题。对于一个堆积层结构(几层堆积而成)。对于一个堆积层结构(几层堆积而成)当输入为 x时其学习到的特征记为F(x), 现在再加一条分支,直接跳到堆积层的输出,则此时最终输出H(x) = F(x) + x
如下图
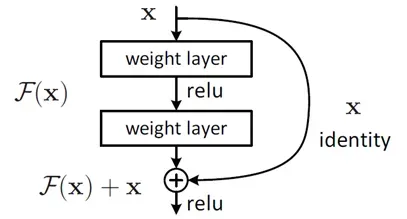
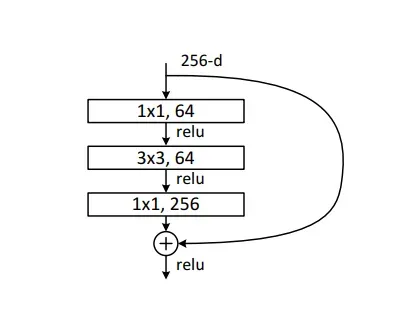
这种跳跃连接就叫做shortcut connection(类似电路中的短路)。具体原理这边不展开叙说,感兴趣的可以去看原论文。上面这种两层结构的叫BasicBlock,一般适用于ResNet18和ResNet34,而ResNet50以后都使用下面这种三层的残差结构叫Bottleneck
2. ResNet具体结构
上面简单说了以下残差网络与普通卷积的区别,接下来用图来看一下网络的结构
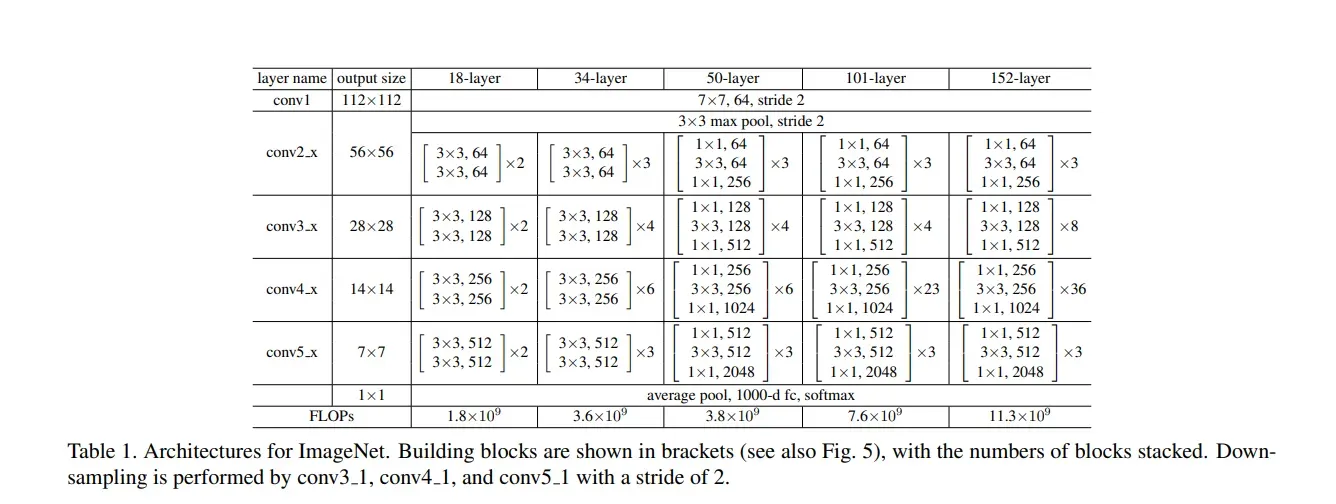
可以看到,18层的网络有五个部分组成,从conv2开始,每层都有两个有残差块,并且每个残差块具有2个卷积层。接下来再具体看看18层以及50层的具体结构
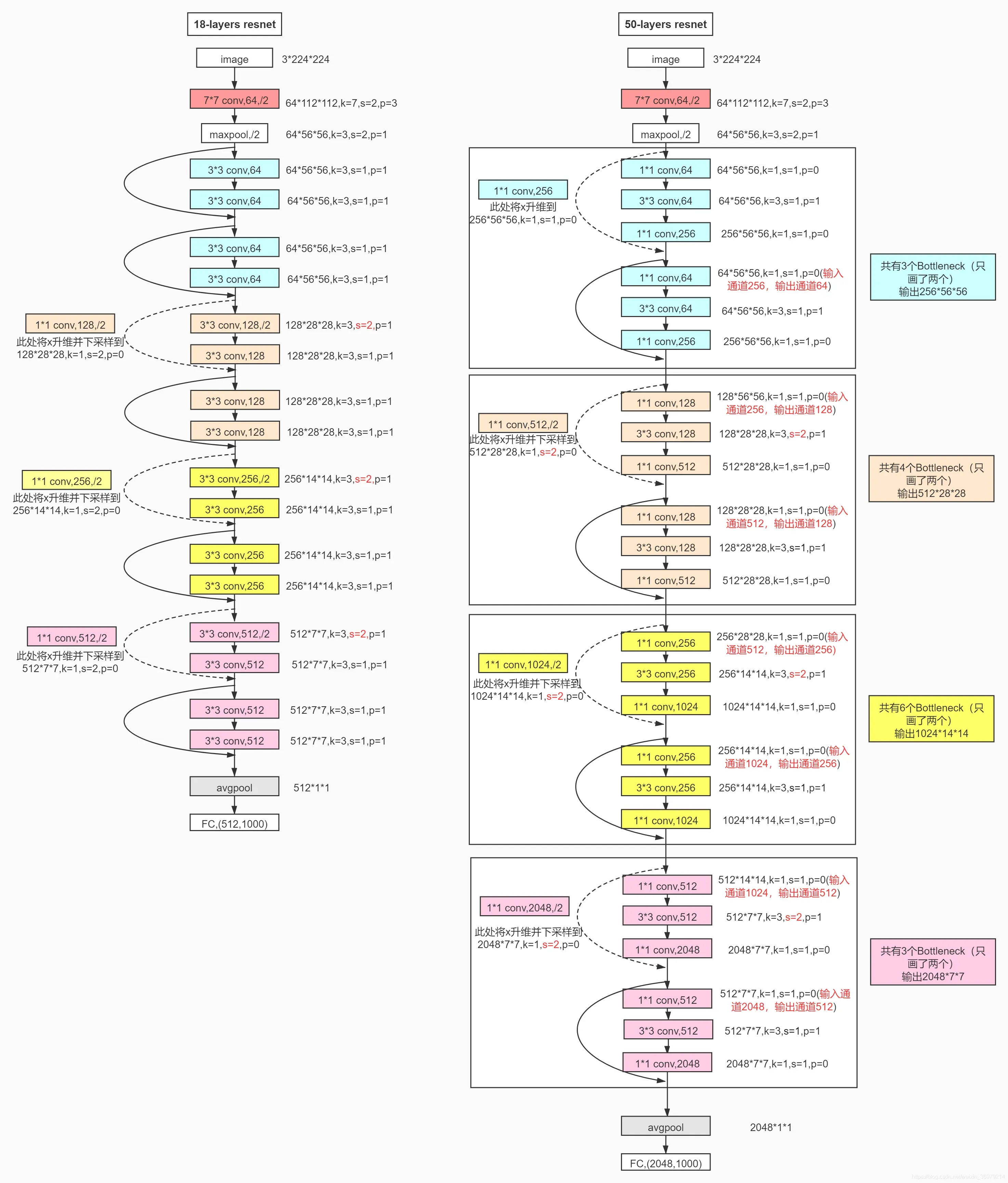
其中,蓝色部分为conv2,然后往下依次按颜色划分为conv3、conv4,conv5。需要注意的是,从conv3开始,第一个残差块的第一个卷积层的stride为2,这是每层图片尺寸变化的原因。另外,stride为2的时候,每层的维度也就是channel也发生了变化,这这时候,残差与输出不是直接相连的,因为维度不匹配,需要进行升维,也就是上图中虚线连接的残差块,实线部分代表可以直接相加.
二、ResNet分步骤实现
首先实现残差块:
class BasicBlock(nn.Module):
def __init__(self,in_channels,out_channels,stride=[1,1],padding=1) -> None:
super(BasicBlock, self).__init__()
# 残差部分
self.layer = nn.Sequential(
nn.Conv2d(in_channels,out_channels,kernel_size=3,stride=stride[0],padding=padding,bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU(inplace=True), # 原地替换 节省内存开销
nn.Conv2d(out_channels,out_channels,kernel_size=3,stride=stride[1],padding=padding,bias=False),
nn.BatchNorm2d(out_channels)
)
# shortcut 部分
# 由于存在维度不一致的情况 所以分情况
self.shortcut = nn.Sequential()
if stride[0] != 1 or in_channels != out_channels:
self.shortcut = nn.Sequential(
# 卷积核为1 进行升降维
# 注意跳变时 都是stride==2的时候 也就是每次输出信道升维的时候
nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=stride[0], bias=False),
nn.BatchNorm2d(out_channels)
)
def forward(self, x):
out = self.layer(x)
out += self.shortcut(x)
out = F.relu(out)
return out
接下来是ResNet18的具体实现
# 采用bn的网络中,卷积层的输出并不加偏置
class ResNet18(nn.Module):
def __init__(self, BasicBlock, num_classes=10) -> None:
super(ResNet18, self).__init__()
self.in_channels = 64
# 第一层作为单独的 因为没有残差快
self.conv1 = nn.Sequential(
nn.Conv2d(3,64,kernel_size=7,stride=2,padding=3,bias=False),
nn.BatchNorm2d(64),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
)
# conv2_x
self.conv2 = self._make_layer(BasicBlock,64,[[1,1],[1,1]])
# conv3_x
self.conv3 = self._make_layer(BasicBlock,128,[[2,1],[1,1]])
# conv4_x
self.conv4 = self._make_layer(BasicBlock,256,[[2,1],[1,1]])
# conv5_x
self.conv5 = self._make_layer(BasicBlock,512,[[2,1],[1,1]])
self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
self.fc = nn.Linear(512, num_classes)
#这个函数主要是用来,重复同一个残差块
def _make_layer(self, block, out_channels, strides):
layers = []
for stride in strides:
layers.append(block(self.in_channels, out_channels, stride))
self.in_channels = out_channels
return nn.Sequential(*layers)
def forward(self, x):
out = self.conv1(x)
out = self.conv2(out)
out = self.conv3(out)
out = self.conv4(out)
out = self.conv5(out)
# out = F.avg_pool2d(out,7)
out = self.avgpool(out)
out = out.reshape(x.shape[0], -1)
out = self.fc(out)
return out
可以输出网络结构看一下
res18 = ResNet18(BasicBlock)
print(res18)
ResNet18(
(conv1): Sequential(
(0): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)
(1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
)
(conv2): Sequential(
(0): BasicBlock(
(layer): Sequential(
(0): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(4): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(shortcut): Sequential()
)
(1): BasicBlock(
(layer): Sequential(
(0): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(4): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(shortcut): Sequential()
)
)
(conv3): Sequential(
(0): BasicBlock(
(layer): Sequential(
(0): Conv2d(64, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(4): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(shortcut): Sequential(
(0): Conv2d(64, 128, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(layer): Sequential(
(0): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(4): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(shortcut): Sequential()
)
)
(conv4): Sequential(
(0): BasicBlock(
(layer): Sequential(
(0): Conv2d(128, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(4): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(shortcut): Sequential(
(0): Conv2d(128, 256, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(layer): Sequential(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(4): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(shortcut): Sequential()
)
)
(conv5): Sequential(
(0): BasicBlock(
(layer): Sequential(
(0): Conv2d(256, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(4): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(shortcut): Sequential(
(0): Conv2d(256, 512, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(layer): Sequential(
(0): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(4): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(shortcut): Sequential()
)
)
(avgpool): AdaptiveAvgPool2d(output_size=(1, 1))
(fc): Linear(in_features=512, out_features=10, bias=True)
)
至此,Resnet18就构建好了
三、完整例子+测试
import torch
from torch import nn
from torch.utils.data import DataLoader
from torchvision import datasets, utils
from torchvision.transforms import ToTensor
import matplotlib.pyplot as plt
import numpy as np
from torch.utils.data.dataset import Dataset
from torchvision.transforms import transforms
from pathlib import Path
import cv2
from PIL import Image
import torch.nn.functional as F
%matplotlib inline
%config InlineBackend.figure_format = 'svg' # 控制显示
transform = transforms.Compose([ToTensor(),
transforms.Normalize(
mean=[0.5,0.5,0.5],
std=[0.5,0.5,0.5]
),
transforms.Resize((224, 224))
])
training_data = datasets.CIFAR10(
root="data",
train=True,
download=True,
transform=transform,
)
testing_data = datasets.CIFAR10(
root="data",
train=False,
download=True,
transform=transform,
)
class BasicBlock(nn.Module):
def __init__(self,in_channels,out_channels,stride=[1,1],padding=1) -> None:
super(BasicBlock, self).__init__()
# 残差部分
self.layer = nn.Sequential(
nn.Conv2d(in_channels,out_channels,kernel_size=3,stride=stride[0],padding=padding,bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU(inplace=True), # 原地替换 节省内存开销
nn.Conv2d(out_channels,out_channels,kernel_size=3,stride=stride[1],padding=padding,bias=False),
nn.BatchNorm2d(out_channels)
)
# shortcut 部分
# 由于存在维度不一致的情况 所以分情况
self.shortcut = nn.Sequential()
if stride != 1 or in_channels != out_channels:
self.shortcut = nn.Sequential(
# 卷积核为1 进行升降维
nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=stride[0], bias=False),
nn.BatchNorm2d(out_channels)
)
def forward(self, x):
# print('shape of x: {}'.format(x.shape))
out = self.layer(x)
# print('shape of out: {}'.format(out.shape))
# print('After shortcut shape of x: {}'.format(self.shortcut(x).shape))
out += self.shortcut(x)
out = F.relu(out)
return out
# 采用bn的网络中,卷积层的输出并不加偏置
class ResNet18(nn.Module):
def __init__(self, BasicBlock, num_classes=10) -> None:
super(ResNet18, self).__init__()
self.in_channels = 64
# 第一层作为单独的 因为没有残差快
self.conv1 = nn.Sequential(
nn.Conv2d(3,64,kernel_size=7,stride=2,padding=3,bias=False),
nn.BatchNorm2d(64),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
)
# conv2_x
self.conv2 = self._make_layer(BasicBlock,64,[[1,1],[1,1]])
# self.conv2_2 = self._make_layer(BasicBlock,64,[1,1])
# conv3_x
self.conv3 = self._make_layer(BasicBlock,128,[[2,1],[1,1]])
# self.conv3_2 = self._make_layer(BasicBlock,128,[1,1])
# conv4_x
self.conv4 = self._make_layer(BasicBlock,256,[[2,1],[1,1]])
# self.conv4_2 = self._make_layer(BasicBlock,256,[1,1])
# conv5_x
self.conv5 = self._make_layer(BasicBlock,512,[[2,1],[1,1]])
# self.conv5_2 = self._make_layer(BasicBlock,512,[1,1])
self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
self.fc = nn.Linear(512, num_classes)
#这个函数主要是用来,重复同一个残差块
def _make_layer(self, block, out_channels, strides):
layers = []
for stride in strides:
layers.append(block(self.in_channels, out_channels, stride))
self.in_channels = out_channels
return nn.Sequential(*layers)
def forward(self, x):
out = self.conv1(x)
out = self.conv2(out)
out = self.conv3(out)
out = self.conv4(out)
out = self.conv5(out)
# out = F.avg_pool2d(out,7)
out = self.avgpool(out)
out = out.reshape(x.shape[0], -1)
out = self.fc(out)
return out
# 保持数据集和测试机能完整划分
batch_size=100
train_data = DataLoader(dataset=training_data,batch_size=batch_size,shuffle=True,drop_last=True)
test_data = DataLoader(dataset=testing_data,batch_size=batch_size,shuffle=True,drop_last=True)
images,labels = next(iter(train_data))
print(images.shape)
img = utils.make_grid(images)
img = img.numpy().transpose(1,2,0)
mean=[0.5,0.5,0.5]
std=[0.5,0.5,0.5]
img = img * std + mean
print([labels[i] for i in range(64)])
plt.imshow(img)
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
model = res18.to(device)
cost = torch.nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(model.parameters())
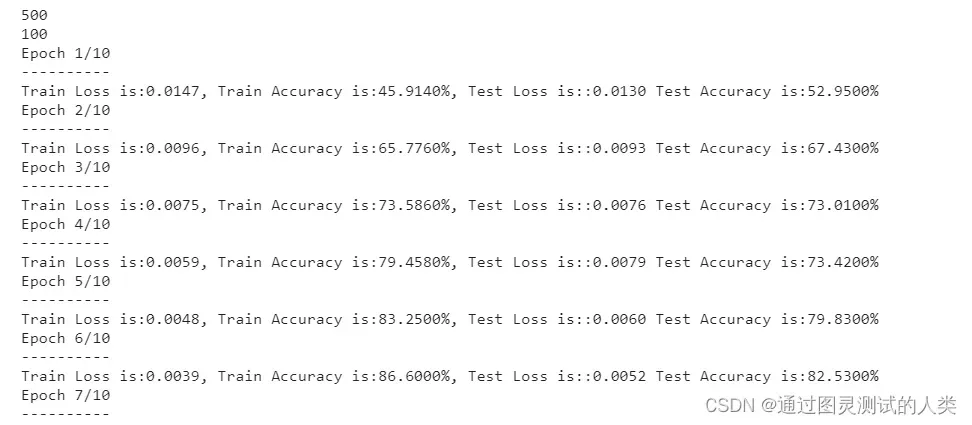
print(len(train_data))
print(len(test_data))
epochs = 10
for epoch in range(epochs):
running_loss = 0.0
running_correct = 0.0
model.train()
print("Epoch {}/{}".format(epoch+1,epochs))
print("-"*10)
for X_train,y_train in train_data:
# X_train,y_train = torch.autograd.Variable(X_train),torch.autograd.Variable(y_train)
X_train,y_train = X_train.to(device), y_train.to(device)
outputs = model(X_train)
_,pred = torch.max(outputs.data,1)
optimizer.zero_grad()
loss = cost(outputs,y_train)
loss.backward()
optimizer.step()
running_loss += loss.item()
running_correct += torch.sum(pred == y_train.data)
testing_correct = 0
test_loss = 0
model.eval()
for X_test,y_test in test_data:
# X_test,y_test = torch.autograd.Variable(X_test),torch.autograd.Variable(y_test)
X_test,y_test = X_test.to(device), y_test.to(device)
outputs = model(X_test)
loss = cost(outputs,y_test)
_,pred = torch.max(outputs.data,1)
testing_correct += torch.sum(pred == y_test.data)
test_loss += loss.item()
print("Train Loss is:{:.4f}, Train Accuracy is:{:.4f}%, Test Loss is::{:.4f} Test Accuracy is:{:.4f}%".format(
running_loss/len(training_data), 100*running_correct/len(training_data),
test_loss/len(testing_data),
100*testing_correct/len(testing_data)
))
可以看看结果 还是不错的
到目前为止,pytorch构建resnet18就完成了。接下来会构建50
总结
通过手写网络,可以加深对网络的理解,同时运用pytorch更加熟练。
PS: 此博客同时更新于个人博客
文章出处登录后可见!