Dataset: https://data.caltech.edu/records/20099
目录
动机
在这篇文章中,作者为了解决面部关键点估计时的遮挡和形状的差异问题,提出了一种名为RCPR( Robust Cascaded Pose Regression)的方法,在RCPR方法训练时需要用到每一个关键点是否被遮挡的ground-truth信息,因此作者就以一种较小成本的制作方法在训练集中为每一个landmark 添加了一个 flag 用来编码这个关键点的可见度(visibility)信息。作者将这个添加关键点可见度信息的数据集成为Caltech Occluded Faces in the Wild(COFW)数据集。
本篇博客的重点不在RCPR方法上,读者若感兴趣可以通过上面原文的链接自行了解,下面我们将重点关注数据集的内容和使用方法上。
COFW数据集介绍
为每张图片的关键点添加了是否被遮挡的标注后,可视化效果如下,红色代表被遮挡,绿色代表未遮挡。
可见度信息添加方式其实很简单,就是在原先关键点的标注信息![]() 之后,为每个关键点添加第三维度的信息
之后,为每个关键点添加第三维度的信息![]() ,也就是每个关键点的标注变成了
,也就是每个关键点的标注变成了![]() 。作者使用RCPR方法对着三个维度同时预测
。作者使用RCPR方法对着三个维度同时预测
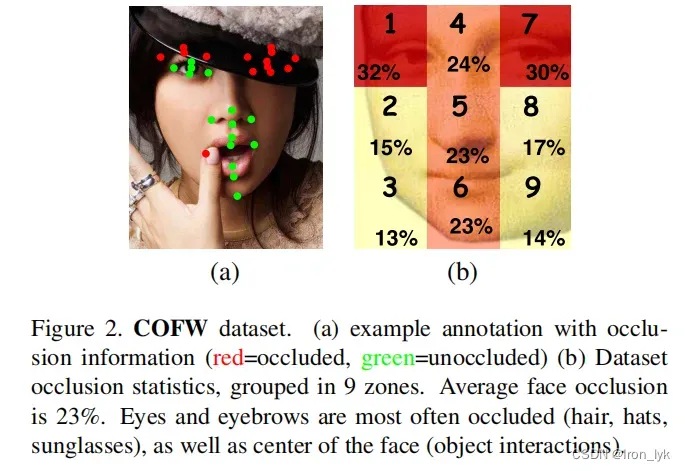
正如名字一样,作者提出COFW数据集的初衷是为了呈现现实世界条件下的人脸,因此COFW数据集中的数据在遮挡和姿态上都更加具有挑战性。COFW数据集共包含1007张images,收集于各种各样的来源,所有的图片被手工标注了与LFPW[1]数据集中一样的29个关键点。数据集中的面部被不同程度的遮挡,平均遮挡率为28%,并且遮挡类型的差异很大。
COFW数据集使用(代码)
通过上面的官方链接下载后,有三个文件:COFW、COFW_color、documentation。
COFW文件夹对应的是灰度数据,COFW_color对应的是RGB数据,documentation是文档的其他相关内容。下面我们主要以COFW文件夹进行讲解。 在”./COFW/common/xpburgos/behavior/code/pose/”文件夹下放置了三个文件:COFW_test.mat,COFW_train.mat 和 loadCOFW.m。前两个是存放测试集、训练集数据的mat格式文件。loadCOFW.m是官方给的数据格式及读取说明,下面是对数据格式的介绍。
%Specify files containing training/testing images, load data
trFile='COFW_train.mat';testFile='COFW_test.mat';
load(trFile,'phisTr','IsTr','bboxesTr');
load(testFile,'phisT','IsT','bboxesT');
%% CONTENTS of files
%IsTr = training images = cell(1345,1)
%IsT = testing images = cell(507,1)
%phisTr = training ground truth = [1345 x 87] where 1..29 is X position, 30..58 Y position, 59..87 occlusion bit
%phisT = testing ground truth = [507 x 87] where 1..29 is X position, 30..58 Y position, 59..87 occlusion bit
%bboxesTr = training face bounding boxes = [1345 x 4] (left, top, width, height)
%bboxesT = testing face bounding boxes = [507 x 4] (left, top, width, height)
%
% NOTE 1: First 845 training images belong to LFPW dataset (unoccluded), only remaining 500 images are from COFW
% NOTE 2: Face bounding boxes are not perfect, as they simulate a real face detector由上可以看出,COFW_test.mat和COFW_train.mat中分别有三个cell:‘phisTr’,’IsTr’,’bboxesTr’。以训练集为例:‘phisTr’的size为[1345, 87],第一个维度1345表示有1345张图像,其中前845张是来自于LFPW数据集(unoccluded),后500张图像来自COFW数据集,第二个维度87的前29个值表示关键点x坐标,中间29个值表示y坐标,最后29个值表示关键点是否被遮挡(0或1); ‘IsTr’的size是[1345,1],表示1345张图片的ref,可以通过它来获取原始图像的数据;‘bboxesTr’的size是[1345,4],第二个维度4表示每张图片中人脸bounding box 的左上角的(x,y)坐标值以及框的宽和高,(xmin,ymin,weight,height).
下面是使用python对COFW_test.mat文件读取,并显示第二张图片的代码:
import numpy as np
import h5py
import cv2
# import scipy
# test = scipy.io.loadmat("COFW_test.mat")
# 用scio.io.loadmat读取时报错:NotImplementedError: Please use HDF reader for matlab v7.3 files
test = h5py.File('COFW_test.mat',"r")
print(test.keys()) # <KeysViewHDF5 ['#refs#', 'IsT', 'bboxesT', 'phisT']>
print(test["IsT"]) # <HDF5 dataset "IsT": shape (1, 507), type "|O">
print(test["bboxesT"]) # <HDF5 dataset "bboxesT": shape (4, 507), type "<f8">
print(test["phisT"]) # <HDF5 dataset "phisT": shape (87, 507), type "<f8">
print(type(test["IsT"])) # <class 'h5py._hl.dataset.Dataset'>
images = np.transpose(test['IsT']) # 所有测试集图像的ref
num = 1
img_name = images[num][0] # 获取第 num 个图像的ref
img = test[img_name] # 读取第 num 个图像的数据
print(img) # <HDF5 dataset "b": shape (239, 179), type "|u1">
print(type(img)) # <class 'h5py._hl.dataset.Dataset'>
img = np.transpose(test[img_name]) # 转换为np数组,并对维度进行转置
print(type(img)) # <class 'numpy.ndarray'>
print(img.shape) # (179, 239)
cv2.imshow("test_img_0",img)
cv2.waitKey(0)
该图片的bbox真实值读取和可视化代码如下:
# 可视化人脸 bounding box
img = np.expand_dims(img,2).repeat(3,2) # 将img的格式变为(w,h,3),否则cv2.rectangle会报错
print(img.shape) # (244, 326, 3)
boxes = test["bboxesT"]
box = boxes[:,num]
print(box)
cv2.rectangle(img, (int(box[0]),int(box[1])), (int(box[0]+box[2]),int(box[1]+box[3])), (0, 0, 255), 2)
cv2.imshow("test_img_0_rect",img)
cv2.waitKey(0)
PS: 官方文档说给出的人脸bounding boxes可能不是很精确,想使用的小伙伴需谨慎
提取人脸关键点坐标及其能见度,并可视化(红色的点表示被遮挡,绿色的点表示可见),代码如下:
# 可视化关键点及其对应的能见度
ph = np.array(test["phisT"])
x_y_v = ph[:,num]
x = x_y_v[0:29]
y = x_y_v[29:58]
v = x_y_v[58:]
for i in range(len(x)):
temp_x, temp_y, temp_v = int(x[i]), int(y[i]), int(v[i])
if temp_v == 1:
cv2.circle(img, (int(temp_x),int(temp_y)), 1, (0, 0, 255), 2)
else:
cv2.circle(img, (int(temp_x),int(temp_y)), 1, (80, 200, 120), 2)
cv2.imshow("test_img_0_landmark",img)
cv2.waitKey(0)
[1] P. Belhumeur, D. Jacobs, D. Kriegman, and N. Kumar. Localizing parts of faces using a concensus of exemplars. In CVPR, 2011.
文章出处登录后可见!