


安装和使用系统环境如下
支持Ubuntu+Windows等:

其实现在Ubuntu+Windows一家亲,如下,♥。
DDS依据项目需要安装合适版本。

基本上啥都支持,何止ubuntu,移动端很多APP都直接用。

回归主题!ROS2 Humble基础
环境:
Ubuntu source /opt/ros/humble/setup.bash
Windows call C:\dev\ros2\local_setup.bat
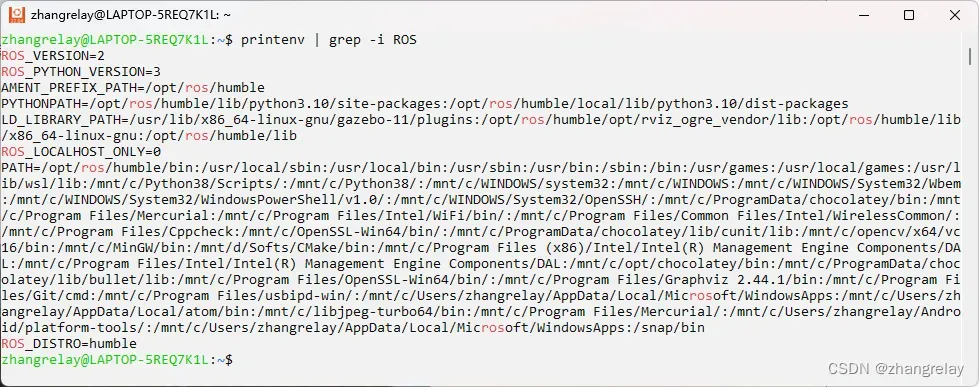
显示环境变量:
U:printenv | grep -i ROS

W:set | findstr -i ROS
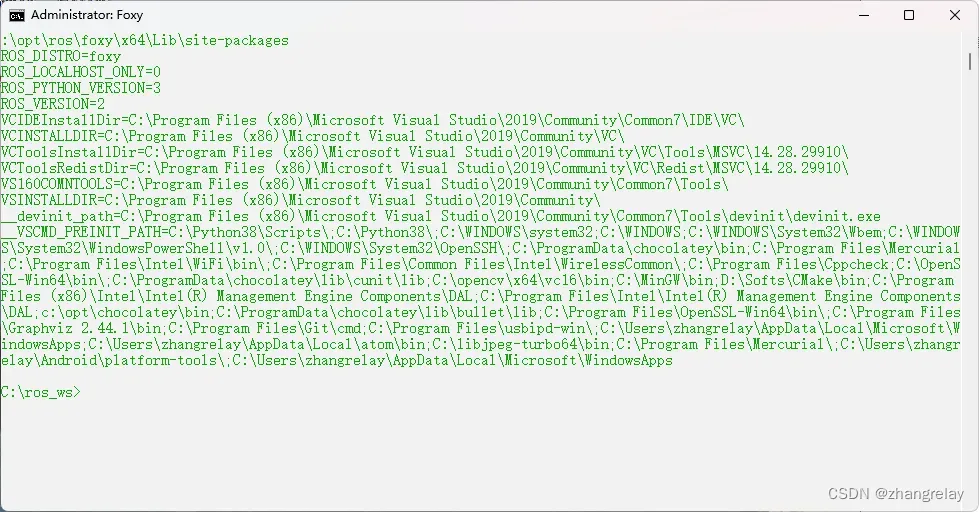

设置 ROS_DOMAIN_ID 网络相关
U: export ROS_DOMAIN_ID=<your_domain_id>
W: set ROS_DOMAIN_ID=<your_domain_id>
使用前需要正确配置ROS 2开发环境。 这可以通过两种方式完成:在打开的每个新 shell 中获取设置文件,或者将 source 命令添加到启动脚本中。
如果在定位或使用 ROS 2 软件包时遇到任何问题,应该做的第一件事是检查环境变量并确保它们设置为想要的版本和发行版。
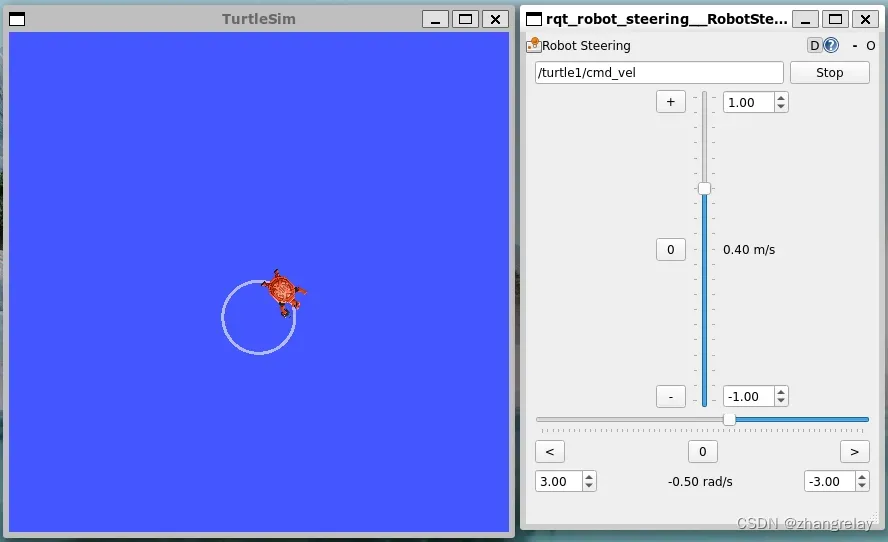
turtlesim
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()


如上是ROS2吉祥物全集
ros2 pkg executables turtlesim


重命名
ros2 run turtlesim turtle_teleop_key –ros-args –remap turtle1/cmd_vel:=turtle2/cmd_vel
图形化工具rqt
sudo apt install ros-humble-rqt-robot-*
安装包日期220520
Setting up ros-humble-rqt-robot-monitor (1.0.5-2jammy.20220520.023300) …
Setting up ros-humble-rqt-robot-steering (1.0.0-4jammy.20220520.023302) …
Setting up ros-humble-rqt-robot-dashboard (0.6.1-3jammy.20220520.023534) …
zhangrelay@LAPTOP-5REQ7K1L:~$ ros2 run rqt_robot_steering rqt_robot_steering
qt_gui_main() found no plugin matching “rqt_robot_steering.robot_steering.RobotSteering”
try passing the option “–force-discover”
[ros2run]: Process exited with failure 1
zhangrelay@LAPTOP-5REQ7K1L:~$ ros2 run rqt_robot_steering rqt_robot_steering –force-discover

核心功能包,源码地址如下,需要切换为humble:
repositories:
ament/ament_cmake:
type: git
url: https://github.com/ament/ament_cmake.git
version: master
ament/ament_index:
type: git
url: https://github.com/ament/ament_index.git
version: master
ament/ament_lint:
type: git
url: https://github.com/ament/ament_lint.git
version: master
ament/ament_package:
type: git
url: https://github.com/ament/ament_package.git
version: master
ament/google_benchmark_vendor:
type: git
url: https://github.com/ament/google_benchmark_vendor.git
version: main
ament/googletest:
type: git
url: https://github.com/ament/googletest.git
version: ros2
ament/uncrustify_vendor:
type: git
url: https://github.com/ament/uncrustify_vendor.git
version: master
eProsima/Fast-CDR:
type: git
url: https://github.com/eProsima/Fast-CDR.git
version: master
eProsima/Fast-DDS:
type: git
url: https://github.com/eProsima/Fast-DDS.git
version: master
eProsima/foonathan_memory_vendor:
type: git
url: https://github.com/eProsima/foonathan_memory_vendor.git
version: master
eclipse-cyclonedds/cyclonedds:
type: git
url: https://github.com/eclipse-cyclonedds/cyclonedds.git
version: releases/0.9.x
eclipse-iceoryx/iceoryx:
type: git
url: https://github.com/eclipse-iceoryx/iceoryx.git
version: release_2.0
ignition/ignition_cmake2_vendor:
type: git
url: https://github.com/ignition-release/ignition_cmake2_vendor.git
version: main
ignition/ignition_math6_vendor:
type: git
url: https://github.com/ignition-release/ignition_math6_vendor.git
version: main
osrf/osrf_pycommon:
type: git
url: https://github.com/osrf/osrf_pycommon.git
version: master
osrf/osrf_testing_tools_cpp:
type: git
url: https://github.com/osrf/osrf_testing_tools_cpp.git
version: master
ros-perception/image_common:
type: git
url: https://github.com/ros-perception/image_common.git
version: ros2
ros-perception/laser_geometry:
type: git
url: https://github.com/ros-perception/laser_geometry.git
version: ros2
ros-planning/navigation_msgs:
type: git
url: https://github.com/ros-planning/navigation_msgs.git
version: ros2
ros-tooling/keyboard_handler:
type: git
url: https://github.com/ros-tooling/keyboard_handler.git
version: main
ros-tooling/libstatistics_collector:
type: git
url: https://github.com/ros-tooling/libstatistics_collector.git
version: master
ros-tracing/ros2_tracing:
type: git
url: https://gitlab.com/ros-tracing/ros2_tracing.git
version: master
ros-visualization/interactive_markers:
type: git
url: https://github.com/ros-visualization/interactive_markers.git
version: ros2
ros-visualization/python_qt_binding:
type: git
url: https://github.com/ros-visualization/python_qt_binding.git
version: main
ros-visualization/qt_gui_core:
type: git
url: https://github.com/ros-visualization/qt_gui_core.git
version: main
ros-visualization/rqt:
type: git
url: https://github.com/ros-visualization/rqt.git
version: ros2
ros-visualization/rqt_action:
type: git
url: https://github.com/ros-visualization/rqt_action.git
version: ros2
ros-visualization/rqt_bag:
type: git
url: https://github.com/ros-visualization/rqt_bag.git
version: ros2
ros-visualization/rqt_console:
type: git
url: https://github.com/ros-visualization/rqt_console.git
version: ros2
ros-visualization/rqt_graph:
type: git
url: https://github.com/ros-visualization/rqt_graph.git
version: galactic-devel
ros-visualization/rqt_msg:
type: git
url: https://github.com/ros-visualization/rqt_msg.git
version: foxy-devel
ros-visualization/rqt_plot:
type: git
url: https://github.com/ros-visualization/rqt_plot.git
version: foxy-devel
ros-visualization/rqt_publisher:
type: git
url: https://github.com/ros-visualization/rqt_publisher.git
version: foxy-devel
ros-visualization/rqt_py_console:
type: git
url: https://github.com/ros-visualization/rqt_py_console.git
version: crystal-devel
ros-visualization/rqt_reconfigure:
type: git
url: https://github.com/ros-visualization/rqt_reconfigure.git
version: dashing
ros-visualization/rqt_service_caller:
type: git
url: https://github.com/ros-visualization/rqt_service_caller.git
version: crystal-devel
ros-visualization/rqt_shell:
type: git
url: https://github.com/ros-visualization/rqt_shell.git
version: crystal-devel
ros-visualization/rqt_srv:
type: git
url: https://github.com/ros-visualization/rqt_srv.git
version: crystal-devel
ros-visualization/rqt_topic:
type: git
url: https://github.com/ros-visualization/rqt_topic.git
version: foxy-devel
ros-visualization/tango_icons_vendor:
type: git
url: https://github.com/ros-visualization/tango_icons_vendor.git
version: master
ros/class_loader:
type: git
url: https://github.com/ros/class_loader.git
version: ros2
ros/kdl_parser:
type: git
url: https://github.com/ros/kdl_parser.git
version: ros2
ros/pluginlib:
type: git
url: https://github.com/ros/pluginlib.git
version: ros2
ros/resource_retriever:
type: git
url: https://github.com/ros/resource_retriever.git
version: ros2
ros/robot_state_publisher:
type: git
url: https://github.com/ros/robot_state_publisher.git
version: ros2
ros/ros_environment:
type: git
url: https://github.com/ros/ros_environment.git
version: rolling
ros/ros_tutorials:
type: git
url: https://github.com/ros/ros_tutorials.git
version: rolling-devel
ros/urdfdom:
type: git
url: https://github.com/ros/urdfdom.git
version: master
ros/urdfdom_headers:
type: git
url: https://github.com/ros/urdfdom_headers.git
version: master
ros2/ament_cmake_ros:
type: git
url: https://github.com/ros2/ament_cmake_ros.git
version: master
ros2/common_interfaces:
type: git
url: https://github.com/ros2/common_interfaces.git
version: master
ros2/console_bridge_vendor:
type: git
url: https://github.com/ros2/console_bridge_vendor.git
version: master
ros2/demos:
type: git
url: https://github.com/ros2/demos.git
version: master
ros2/eigen3_cmake_module:
type: git
url: https://github.com/ros2/eigen3_cmake_module.git
version: master
ros2/example_interfaces:
type: git
url: https://github.com/ros2/example_interfaces.git
version: master
ros2/examples:
type: git
url: https://github.com/ros2/examples.git
version: master
ros2/geometry2:
type: git
url: https://github.com/ros2/geometry2.git
version: ros2
ros2/launch:
type: git
url: https://github.com/ros2/launch.git
version: master
ros2/launch_ros:
type: git
url: https://github.com/ros2/launch_ros.git
version: master
ros2/libyaml_vendor:
type: git
url: https://github.com/ros2/libyaml_vendor.git
version: master
ros2/message_filters:
type: git
url: https://github.com/ros2/message_filters.git
version: master
ros2/mimick_vendor:
type: git
url: https://github.com/ros2/mimick_vendor.git
version: master
ros2/orocos_kdl_vendor:
type: git
url: https://github.com/ros2/orocos_kdl_vendor.git
version: main
ros2/performance_test_fixture:
type: git
url: https://github.com/ros2/performance_test_fixture.git
version: main
ros2/pybind11_vendor:
type: git
url: https://github.com/ros2/pybind11_vendor.git
version: master
ros2/python_cmake_module:
type: git
url: https://github.com/ros2/python_cmake_module.git
version: master
ros2/rcl:
type: git
url: https://github.com/ros2/rcl.git
version: master
ros2/rcl_interfaces:
type: git
url: https://github.com/ros2/rcl_interfaces.git
version: master
ros2/rcl_logging:
type: git
url: https://github.com/ros2/rcl_logging.git
version: master
ros2/rclcpp:
type: git
url: https://github.com/ros2/rclcpp.git
version: master
ros2/rclpy:
type: git
url: https://github.com/ros2/rclpy.git
version: master
ros2/rcpputils:
type: git
url: https://github.com/ros2/rcpputils.git
version: master
ros2/rcutils:
type: git
url: https://github.com/ros2/rcutils.git
version: master
ros2/realtime_support:
type: git
url: https://github.com/ros2/realtime_support.git
version: master
ros2/rmw:
type: git
url: https://github.com/ros2/rmw.git
version: master
ros2/rmw_connextdds:
type: git
url: https://github.com/ros2/rmw_connextdds.git
version: master
ros2/rmw_cyclonedds:
type: git
url: https://github.com/ros2/rmw_cyclonedds.git
version: master
ros2/rmw_dds_common:
type: git
url: https://github.com/ros2/rmw_dds_common.git
version: master
ros2/rmw_fastrtps:
type: git
url: https://github.com/ros2/rmw_fastrtps.git
version: master
ros2/rmw_implementation:
type: git
url: https://github.com/ros2/rmw_implementation.git
version: master
ros2/ros2cli:
type: git
url: https://github.com/ros2/ros2cli.git
version: master
ros2/ros2cli_common_extensions:
type: git
url: https://github.com/ros2/ros2cli_common_extensions.git
version: master
ros2/ros_testing:
type: git
url: https://github.com/ros2/ros_testing.git
version: master
ros2/rosbag2:
type: git
url: https://github.com/ros2/rosbag2.git
version: master
ros2/rosidl:
type: git
url: https://github.com/ros2/rosidl.git
version: master
ros2/rosidl_dds:
type: git
url: https://github.com/ros2/rosidl_dds.git
version: master
ros2/rosidl_defaults:
type: git
url: https://github.com/ros2/rosidl_defaults.git
version: master
ros2/rosidl_python:
type: git
url: https://github.com/ros2/rosidl_python.git
version: master
ros2/rosidl_runtime_py:
type: git
url: https://github.com/ros2/rosidl_runtime_py.git
version: master
ros2/rosidl_typesupport:
type: git
url: https://github.com/ros2/rosidl_typesupport.git
version: master
ros2/rosidl_typesupport_fastrtps:
type: git
url: https://github.com/ros2/rosidl_typesupport_fastrtps.git
version: master
ros2/rpyutils:
type: git
url: https://github.com/ros2/rpyutils.git
version: master
ros2/rviz:
type: git
url: https://github.com/ros2/rviz.git
version: ros2
ros2/spdlog_vendor:
type: git
url: https://github.com/ros2/spdlog_vendor.git
version: master
ros2/sros2:
type: git
url: https://github.com/ros2/sros2.git
version: master
ros2/system_tests:
type: git
url: https://github.com/ros2/system_tests.git
version: master
ros2/test_interface_files:
type: git
url: https://github.com/ros2/test_interface_files.git
version: master
ros2/tinyxml2_vendor:
type: git
url: https://github.com/ros2/tinyxml2_vendor.git
version: master
ros2/tinyxml_vendor:
type: git
url: https://github.com/ros2/tinyxml_vendor.git
version: master
ros2/tlsf:
type: git
url: https://github.com/ros2/tlsf.git
version: master
ros2/unique_identifier_msgs:
type: git
url: https://github.com/ros2/unique_identifier_msgs.git
version: master
ros2/urdf:
type: git
url: https://github.com/ros2/urdf.git
version: ros2
ros2/yaml_cpp_vendor:
type: git
url: https://github.com/ros2/yaml_cpp_vendor.git
version: master文章出处登录后可见!