1. 运动学模型线性化
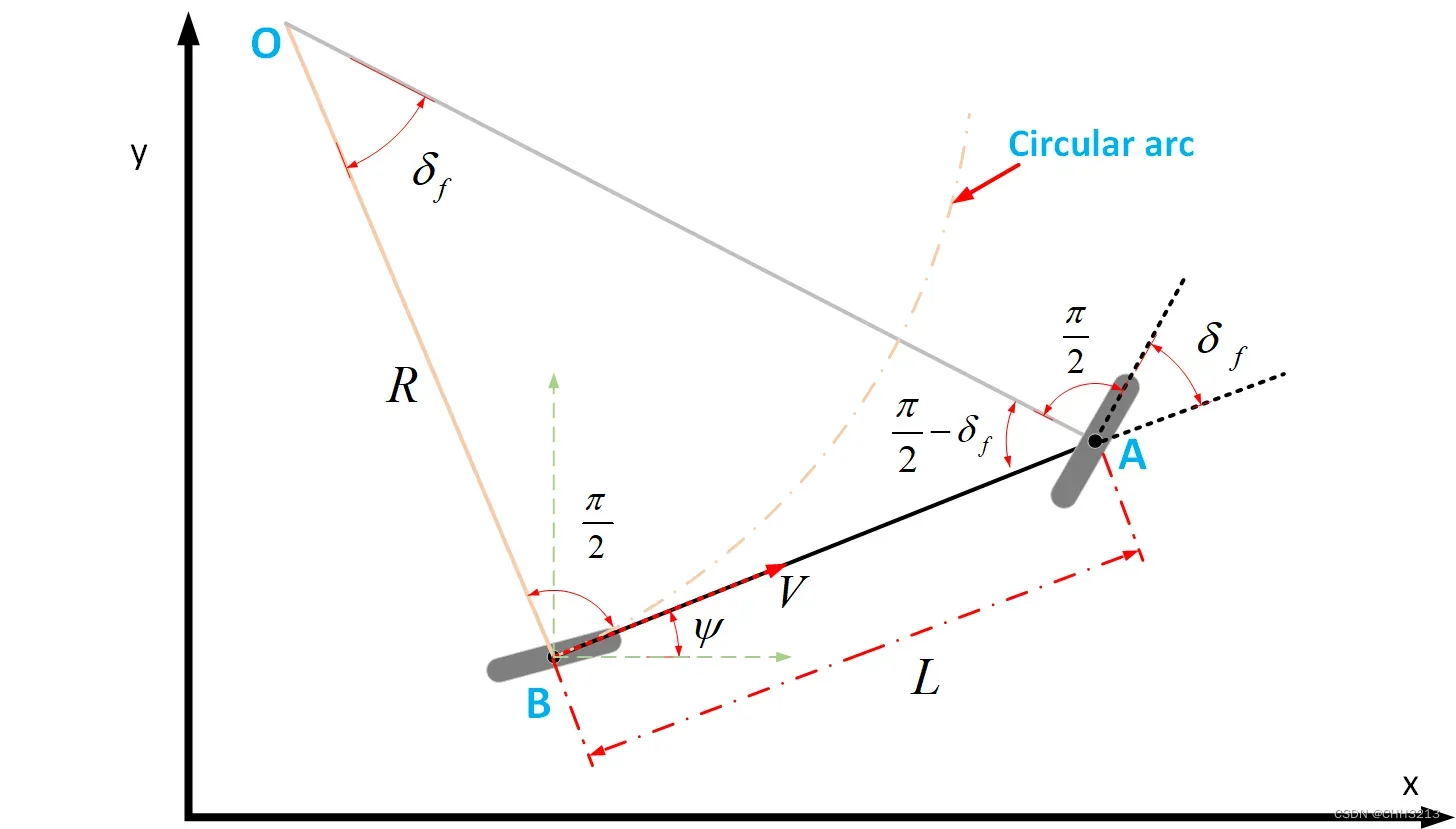
之前讲解了车辆的运动学模型,这边以以后轴中心为车辆中心的单车运动学模型为例进行线性化。
以后轴中心为车辆中心的单车运动学模型如下:
选取状态量为 ,控制量为
,则对于参考轨迹的任意一个参考点,用
表示,上式可以改写为:
其中 。对上式在参考点采用泰勒级数展开,并忽略高阶项:
对 和
求雅克比矩阵,有:
则状态量误差的变化量 表示为 :
上式表明状态误差量可以构成线性状态空间。
2. 线性模型离散化
对等式(6)进行前向欧拉离散化,得到
整理后,得到:
式中,为采样步长,
为单位矩阵,维度与矩阵
一致。
3. python实现
import math
import numpy as np
class KinematicModel_3:
"""假设控制量为转向角delta_f和加速度a
"""
def __init__(self, x, y, psi, v, L, dt):
self.x = x
self.y = y
self.psi = psi
self.v = v
self.L = L
# 实现是离散的模型
self.dt = dt
def update_state(self, a, delta_f):
self.x = self.x+self.v*math.cos(self.psi)*self.dt
self.y = self.y+self.v*math.sin(self.psi)*self.dt
self.psi = self.psi+self.v/self.L*math.tan(delta_f)*self.dt
self.v = self.v+a*self.dt
def get_state(self):
return self.x, self.y, self.psi, self.v
def state_space(self, ref_delta, ref_yaw):
"""将模型离散化后的状态空间表达
Args:
delta (_type_): 参考输入
Returns:
_type_: _description_
"""
A = np.matrix([
[1.0,0.0,-self.v*self.dt*math.sin(ref_yaw)],
[0.0, 1.0, self.v*self.dt*math.cos(ref_yaw)],
[0.0,0.0,1.0]])
B = np.matrix([
[self.dt*math.cos(ref_yaw), 0],
[self.dt*math.sin(ref_yaw), 0],
[self.dt*math.tan(ref_delta), self.v*self.dt/(self.L*math.cos(ref_delta)*math.cos(ref_delta))]
])
return A,B
文章出处登录后可见!
已经登录?立即刷新