运行环境
- Linux:Ubuntu18.04
- ros:Melodic
1. 新建ROS工程目录文件夹
mkdir catkin_ws
cd catkin_ws
mkdir src
catkin_make
2. 下载相关的源码和相关SDK依赖包
2.1 下载Livox SDK
从从览沃 GitHub 获取览沃 Livox SDK 驱动程序并进行编译安装,安装完成后可以将Livox-SDK文件夹删掉
git clone https://github.com/Livox-SDK/Livox-SDK
cd Livox-SDK
cd build && cmake ..
make
sudo make install
2.2 下载 livox_ros_driver ,并进行编译
cd catkin_ws
cd src
git clone https://github.com/Livox-SDK/livox_ros_driver.git
cd ..
catkin_make
3. 将自己的工控机与雷达连接,修改 ip地址
根据 Livox Avia 用户手册说明,所有的 Livox Avia 出厂默认为静态 IP , IP 地址为 192.168.1.1xx (xx为序列号最后两位数字),子网掩码为 255.255.255.0 ,默认网关为 192.168.1.1 。
- 所以这边只需要将工控机电脑的 IP 设置为192.168.1.xx 的频段,只要不与雷达的 IP 相同即可。这里将工控机设置 IP 为 192.168.1.102 。
- 通过
ifconfig查看网口名字,enp4s0是本人的工控机的网口名字。 - 将本地 ip 地址改为 192.168.1.102,子网掩码设置为 255.255.255.0
- 方法一:使用命令行进行更改
sudo ifconfig enp4s0 192.168.1.102 netmask 255.255.255.0
- 方法二:使用界面方式进行更改
将电脑连接网线,进行有线连接的设置,步骤如下:
选择IPv4,方式调整为手动,然后填入相对应的地址和子网掩码

4. 进行相对应的程序测试
cd ~/catkin_ws
source devel/setup.bash
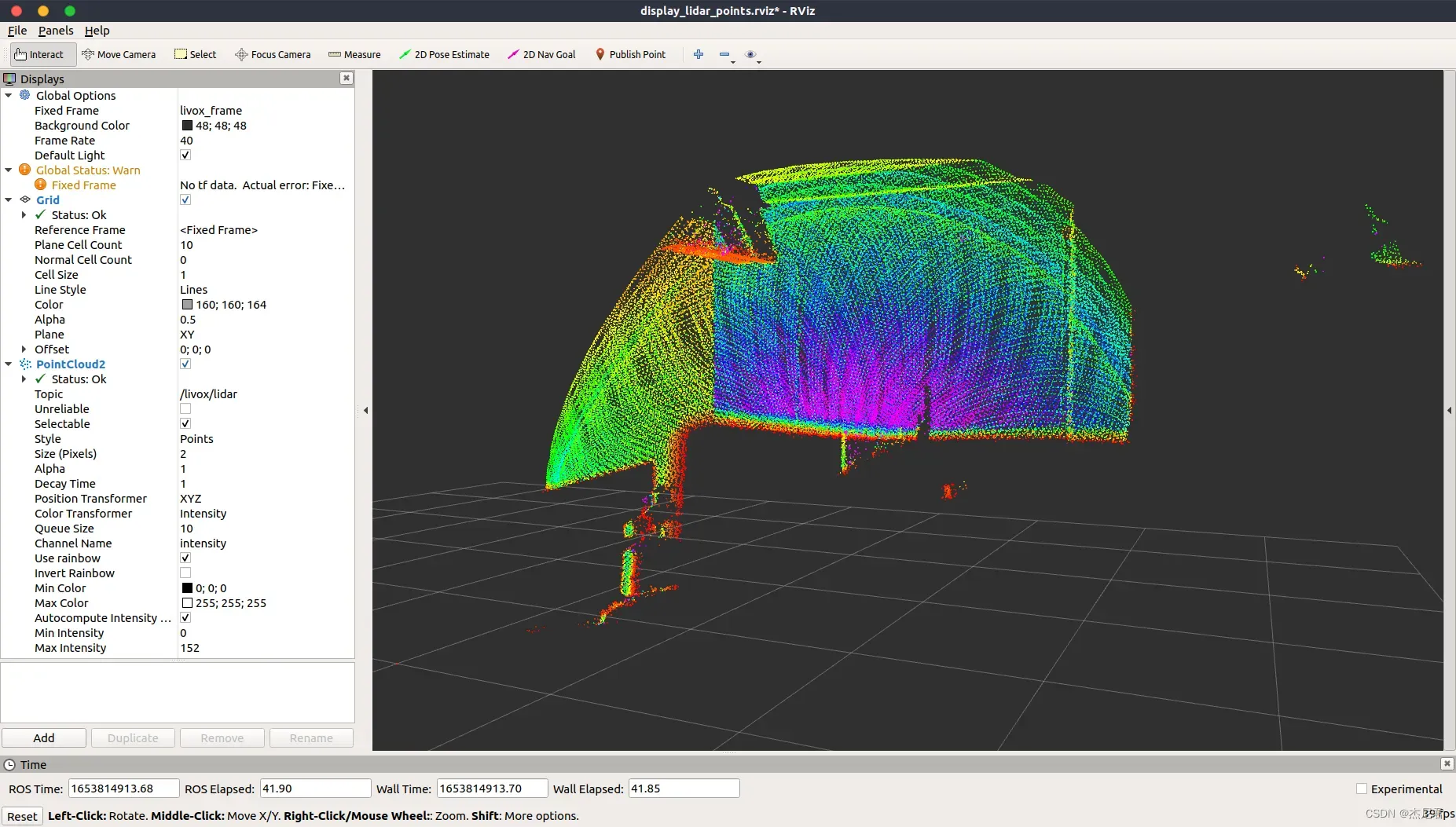
roslaunch livox_ros_driver livox_lidar_rviz.launch
测试成功后,可以通过Rviz可视化进行查看相关的点云图
5. 目前发现的问题
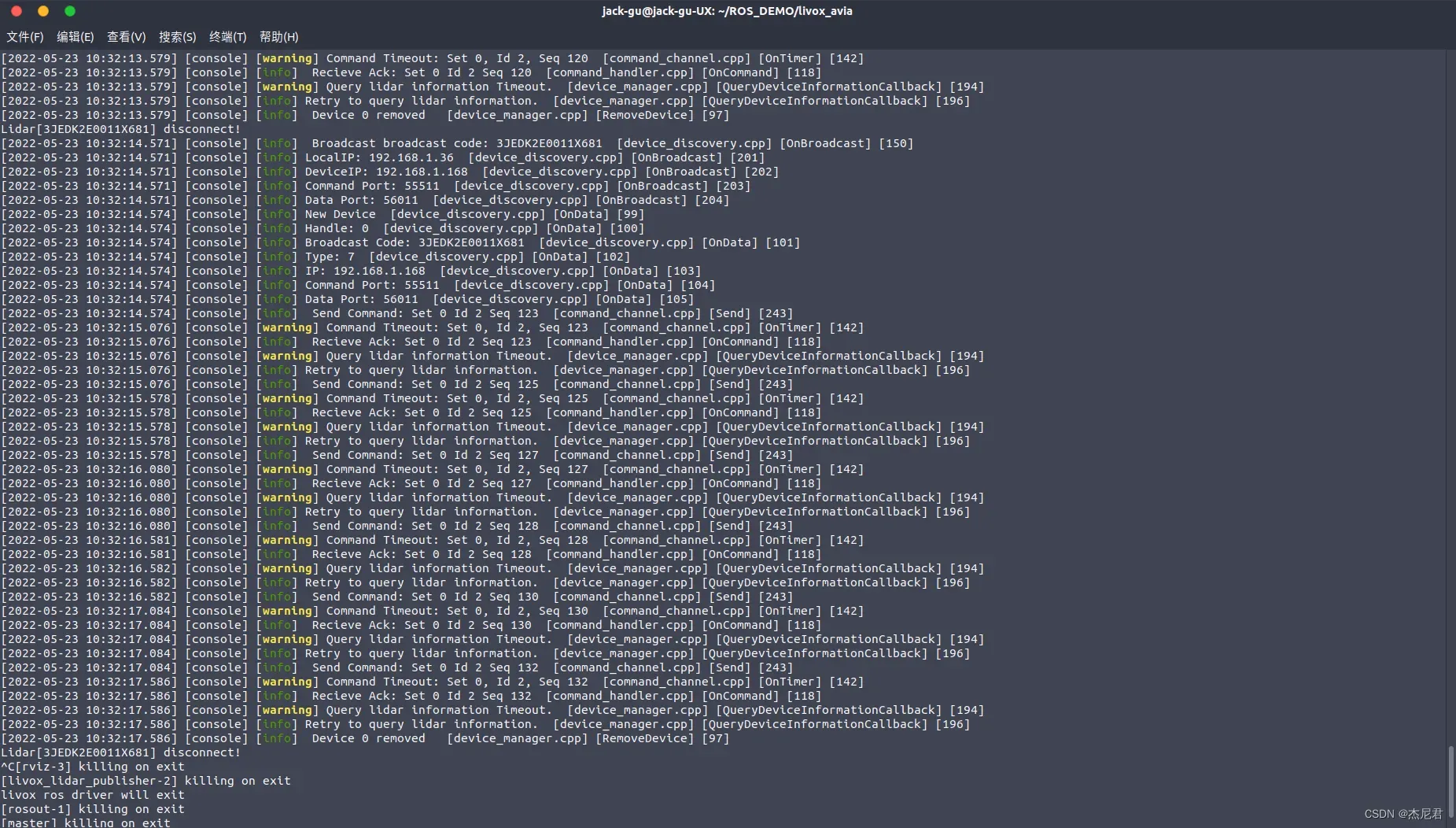
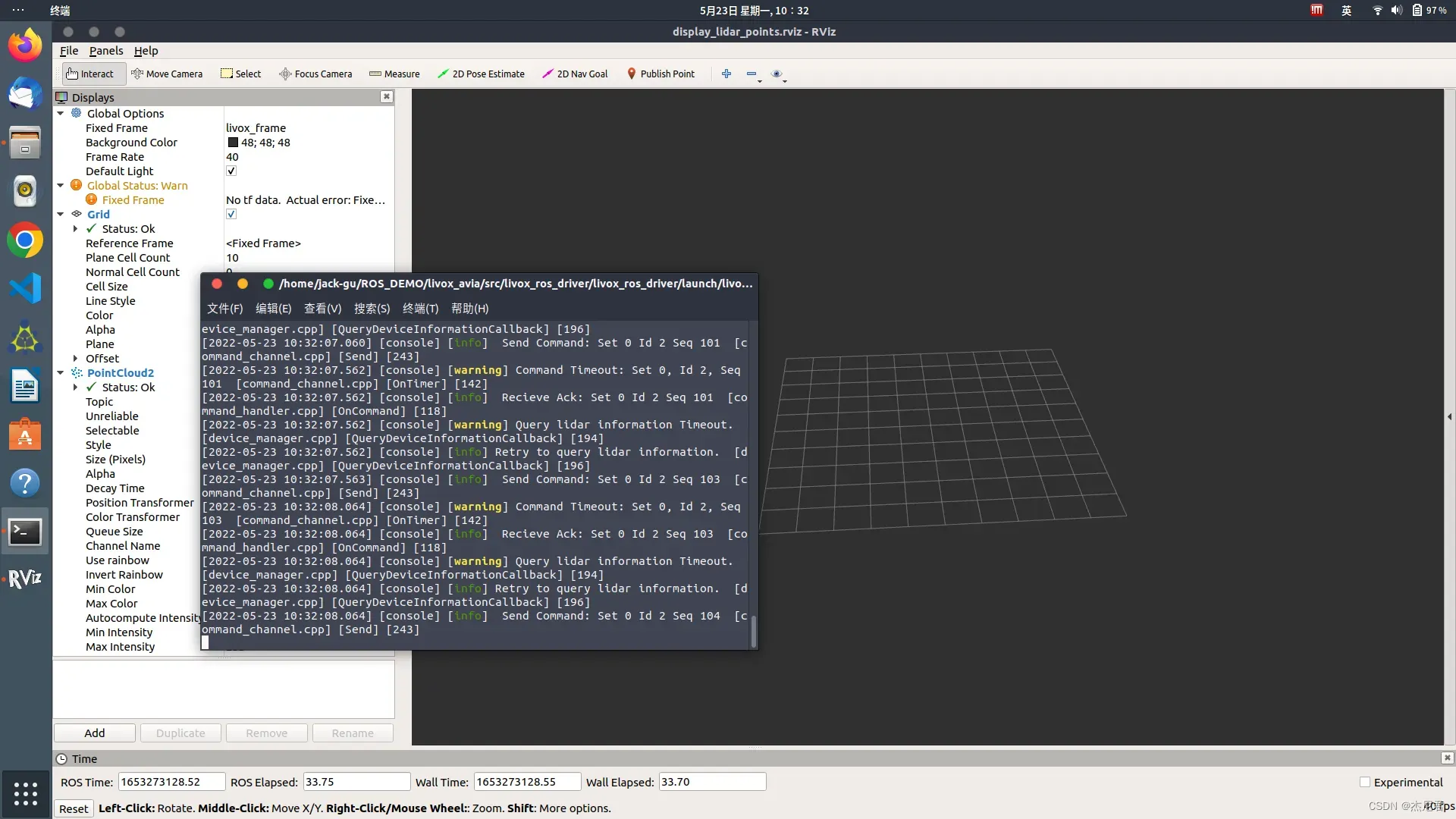
-
目前测试使用时,利用USB转网口的工具连接雷达与工控机进行数据连接时,若是USB转网口工具没有一同与工控机进行开机时,会出现以下雷达无法正常连接的情况。但在官方的viewer软件中可以查看到相关的点云数据。
-
解决方法:连接好硬件链路,
reboot重启工控机。开机后,重新运行相关命令行即可正确读取点云数据。 -
所测试使用的的USB转网口的工具

-
相关报错情况:
文章出处登录后可见!
已经登录?立即刷新