



图像的高频信息和低频信息
低频信息指的是颜色缓慢变化,代表着连续渐变的一块区域,这部分为低频信息。对于一副图像来说,除去高频就是低频,也就是边缘以内的内容为低频,而边缘内的内容就是图像的大部分信息,即图像的大致概貌和轮廓,是图像的近似信息。
反之,图像边缘的灰度值变化快,就对应着高频。图像的细节处也就是属于灰度值急剧变化的区域,正是因为灰度值的急剧变化,才会出现细节。另外对于噪声,在一个像素所在的位置,之所以是噪点,是因为它与正常的点颜色不一样了,也就是说该像素点灰度值明显不一样,所以是高频部分。
通常,图像的低频是图像中对象的大致概况内容,高频对应噪声和细节。
ICML2018″On the spectral bias of neural networks”的研究指出,神经网络更倾向于拟合高频信息,而人类主要关注低频信息,然而对低频分量的学习,更有助于网络提高在对抗干扰过程中的鲁棒性。
旋转矩阵和平移向量
旋转矩阵和平移向量描述了一个刚体在三维空间中的运动状态。
平移向量
首先了解平移向量:
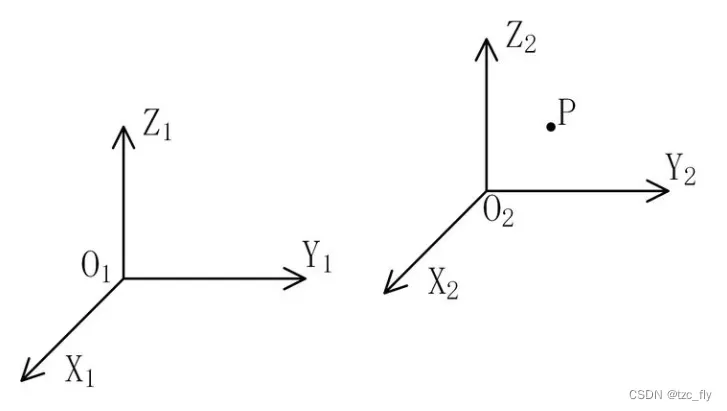
坐标系1和坐标系2平行但不重合,所以空间点从坐标系2到坐标系1的变换只有平移向量,用








其中,

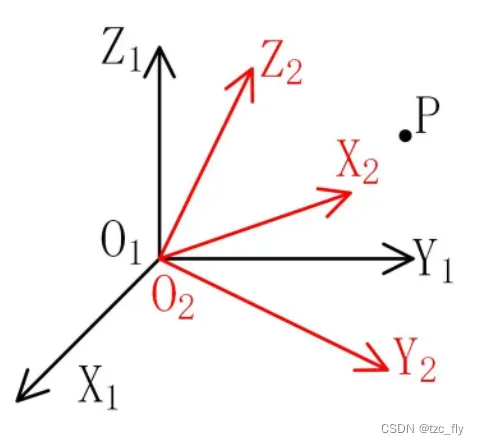
旋转矩阵

相机成像中的四个坐标系
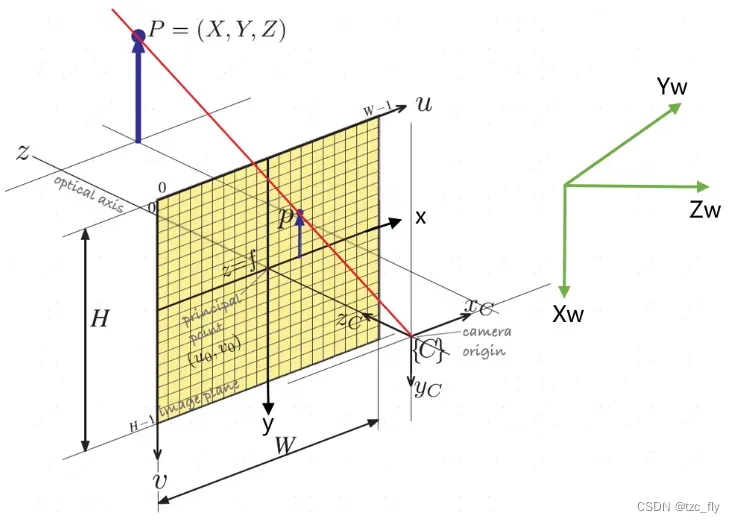

- 图像像素坐标系:表示三维空间物体在图像平面(上图黄色的image plane)上的投影,像素是离散化的,其坐标原点在图像平面的左上角。
- 图像物理坐标系:坐标原点在图像平面中心,
- 相机坐标系:以相机的光心(camera origin)为坐标系原点,
轴平行于图像物理坐标系的



- 世界坐标系:用于表示空间物体的绝对坐标,使用

基于四个坐标系,我们记






令



注意到,

相机内参:从相机坐标系转换到像素坐标系;
相机外参:从世界坐标系转换到相机坐标系;
文章出处登录后可见!