1.Allan方差公式推导
IMU噪声参数辨识-艾伦方差 – 知乎前言在统计学中描述随机变量的两个经典参数是均值和方差,早期在定量表征原子钟的频率稳定度时采用的就是经典方差方法。1996年,学者D.W.Allan在分析铯原子钟频标的频率稳定度时发现经典方差随着时间的增长而发散… https://zhuanlan.zhihu.com/p/158927004 见上文,该博主详细推导了IMU噪声参数辨识公式,并给出了几种应用实例。非常实用,本文主要结合Allan方差图,对零偏稳定性与角度/速度随机游走系数进行读图验证,并提出自己的观点。
https://zhuanlan.zhihu.com/p/158927004 见上文,该博主详细推导了IMU噪声参数辨识公式,并给出了几种应用实例。非常实用,本文主要结合Allan方差图,对零偏稳定性与角度/速度随机游走系数进行读图验证,并提出自己的观点。
2.实测数据分析
2.1 ADIS16488
ADIS16488是ADI公司的经典IMU产品,其手册精度指标能达到5°/hr左右,价格近年来也愈来愈高,而且溢价严重。
以100Hz采样ADIS16488原始数据并进行Allan方差分析:
零偏稳定性的读数即为Allan方差曲线下沿弧线最低点水平切线所对应的纵坐标读数。
而角度随机游走系数则为最与Allan方差曲线相切的斜率为-1/2直线在对数曲线坐标为1时纵坐标的读数。
如下图为x轴16488采样2小时Allan方差曲线,可以读出该陀螺仪在此次量测下零偏稳定性为5.5°/hr,角度随机游走系数为0.6°/sqrt(hr)
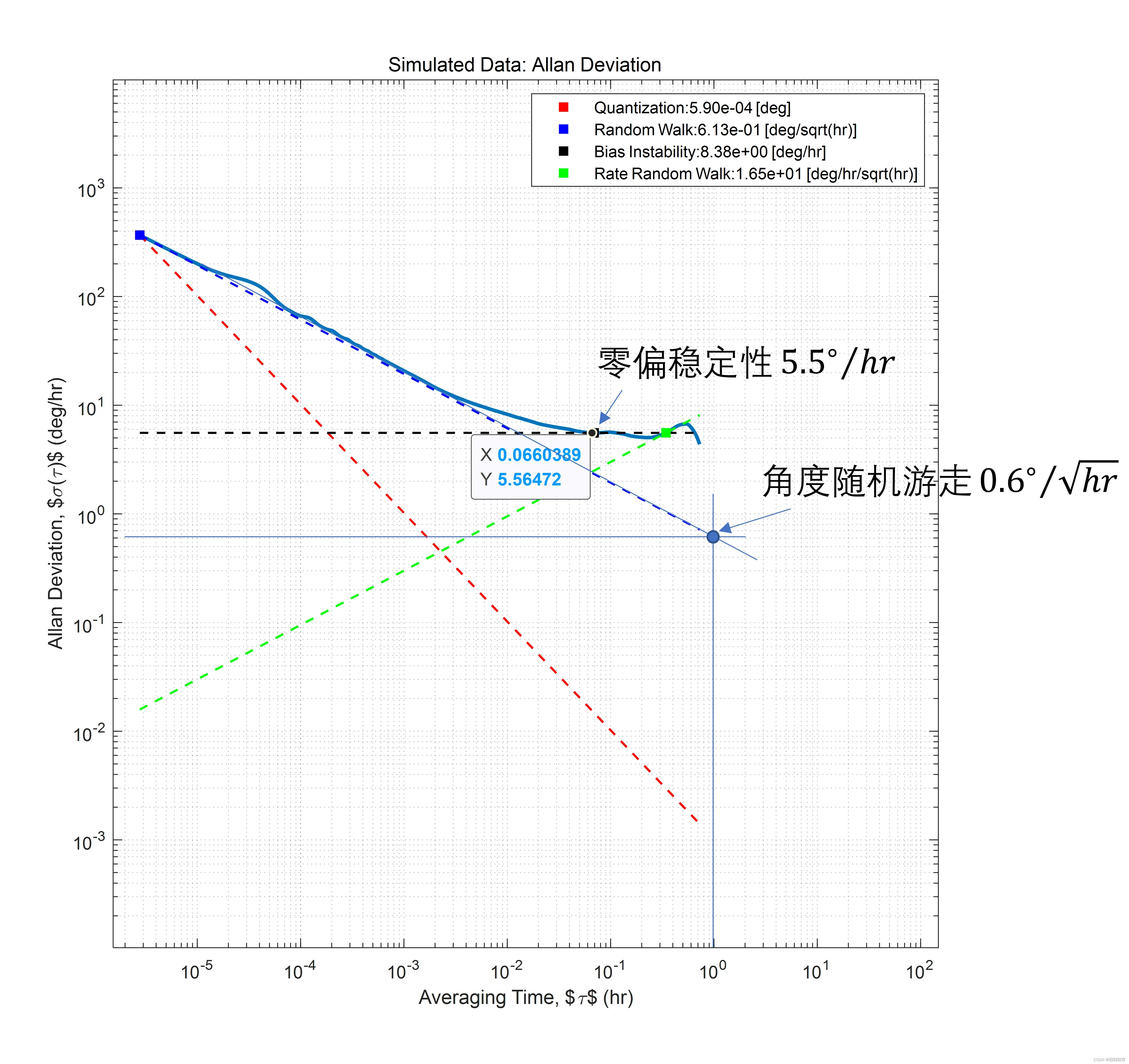
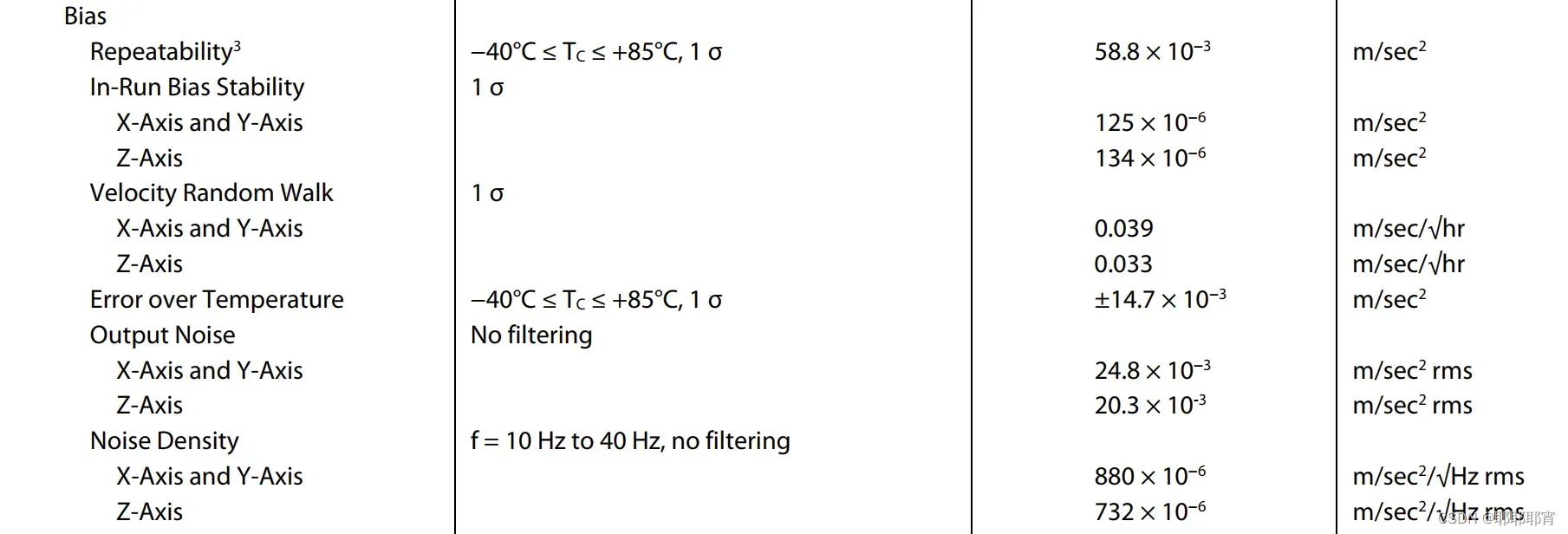
对比一下手册的指标:
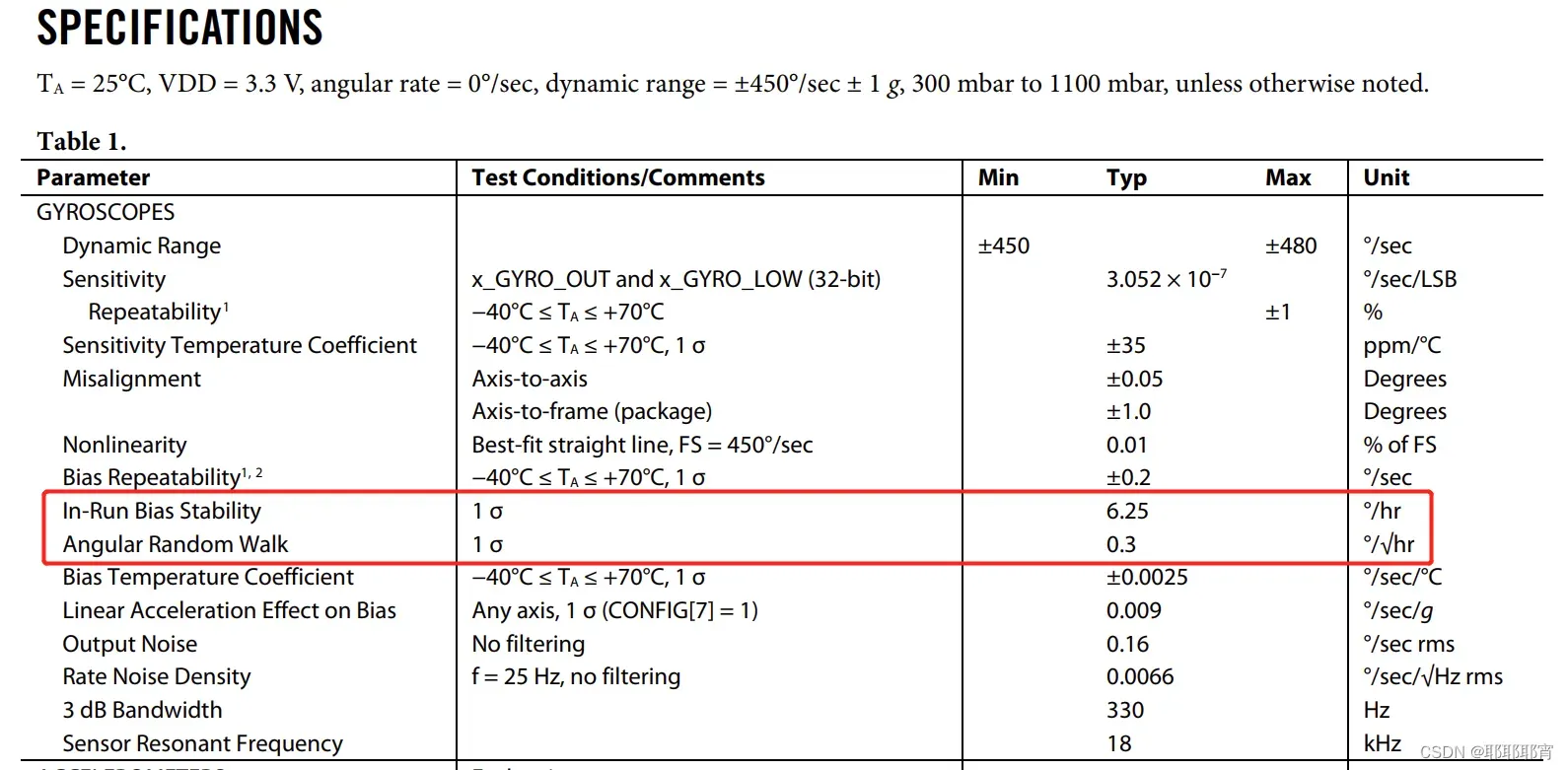
可以看出与手册上指标基本接近。
2.2 CNS16488
由于ADI公式16488溢价严重,而且国内很多家单位都出了国产替代方案,并指标比ADI的更出色,我们选取了一种,进行数据实测。
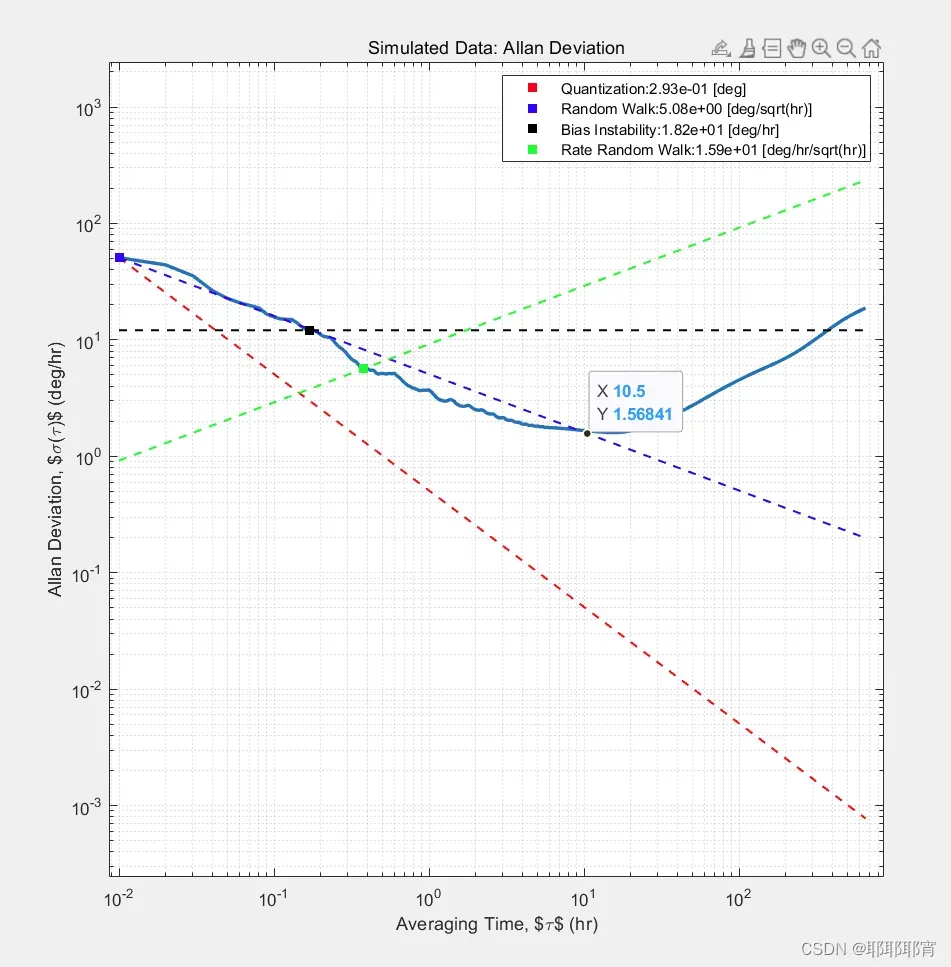
上图ALLAN方差画图设置的横坐标单位为秒,可以看出零偏稳定性为1.56°/h左右,按照GJB来算零偏稳定性(10s平滑)也接近这个值。静态性能还是比较出色的。对比ADIS16488,10s平滑的值接近11°/h,还是有不少优势。
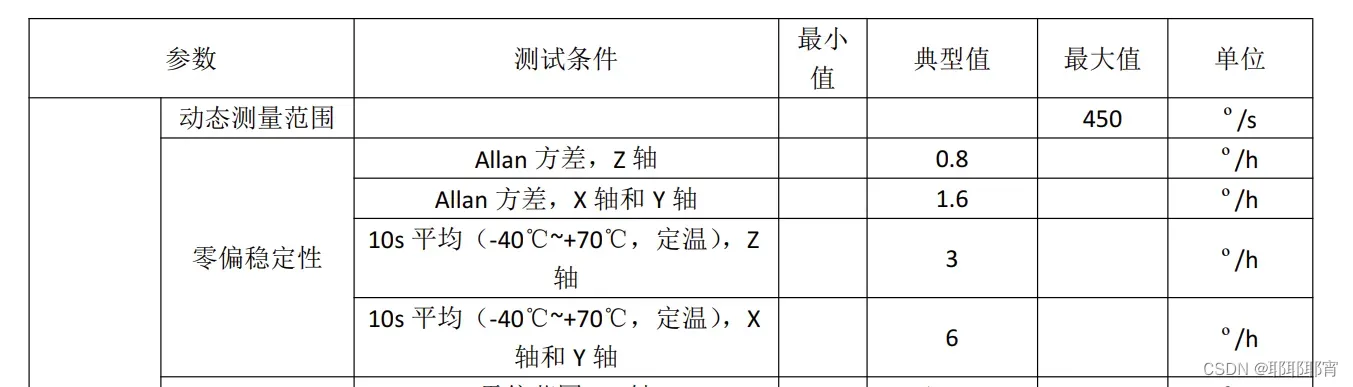
对比手册上的值也十分接近。
3.2 ADIS16507-2
ADIS近些年推出的小体积的嵌入式IMU产品,体积十分小,性能也不错。100Hz采样x轴角速度原始数据并分析ALLAN方差。
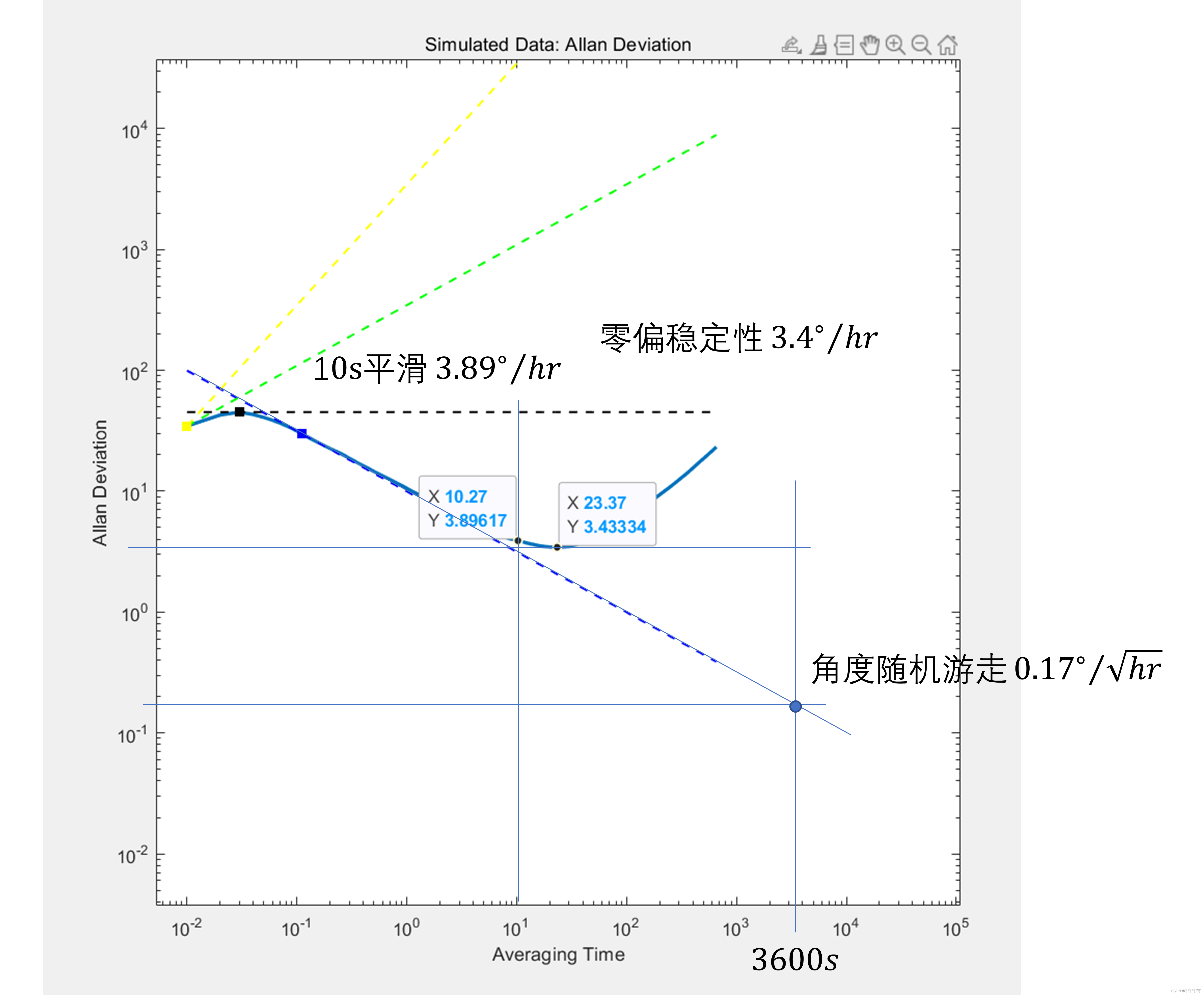
由于上图横坐标为s,所以在计算角度随机游走的时候找出近似找到3600s位置即可估计出角度随机游走系数。
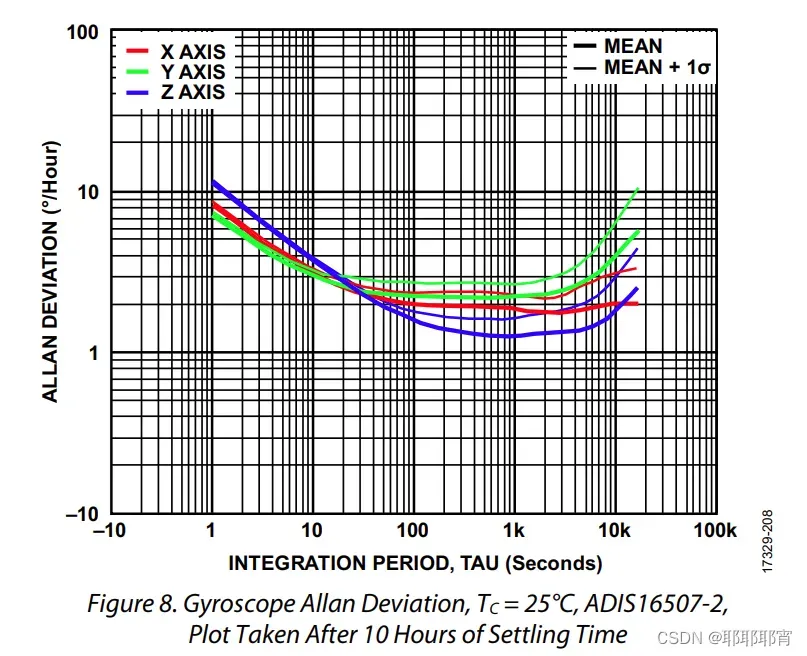
这是手册上给出的ALLAN方差曲线以及标称值。
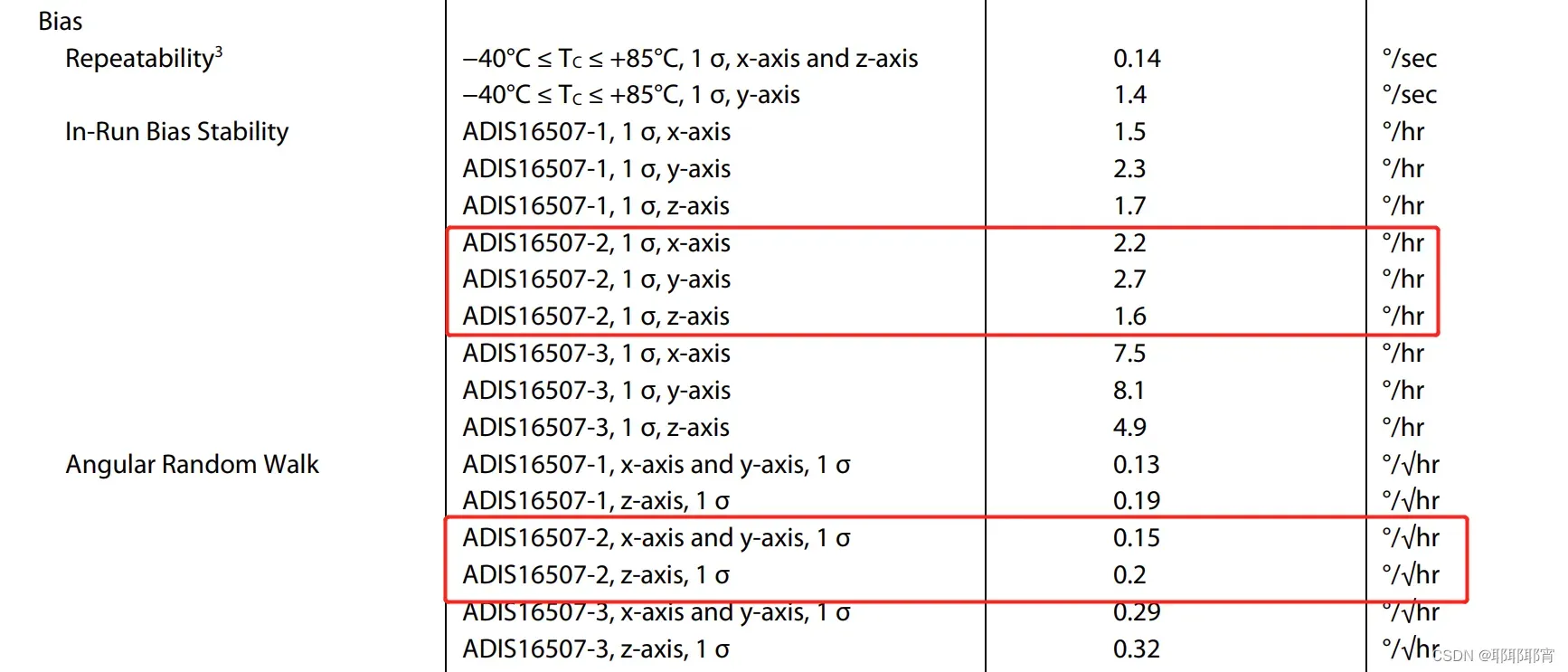
和手册也比较接近,比手册稍差一点
类似,分析加速度计的ALLAN方差图
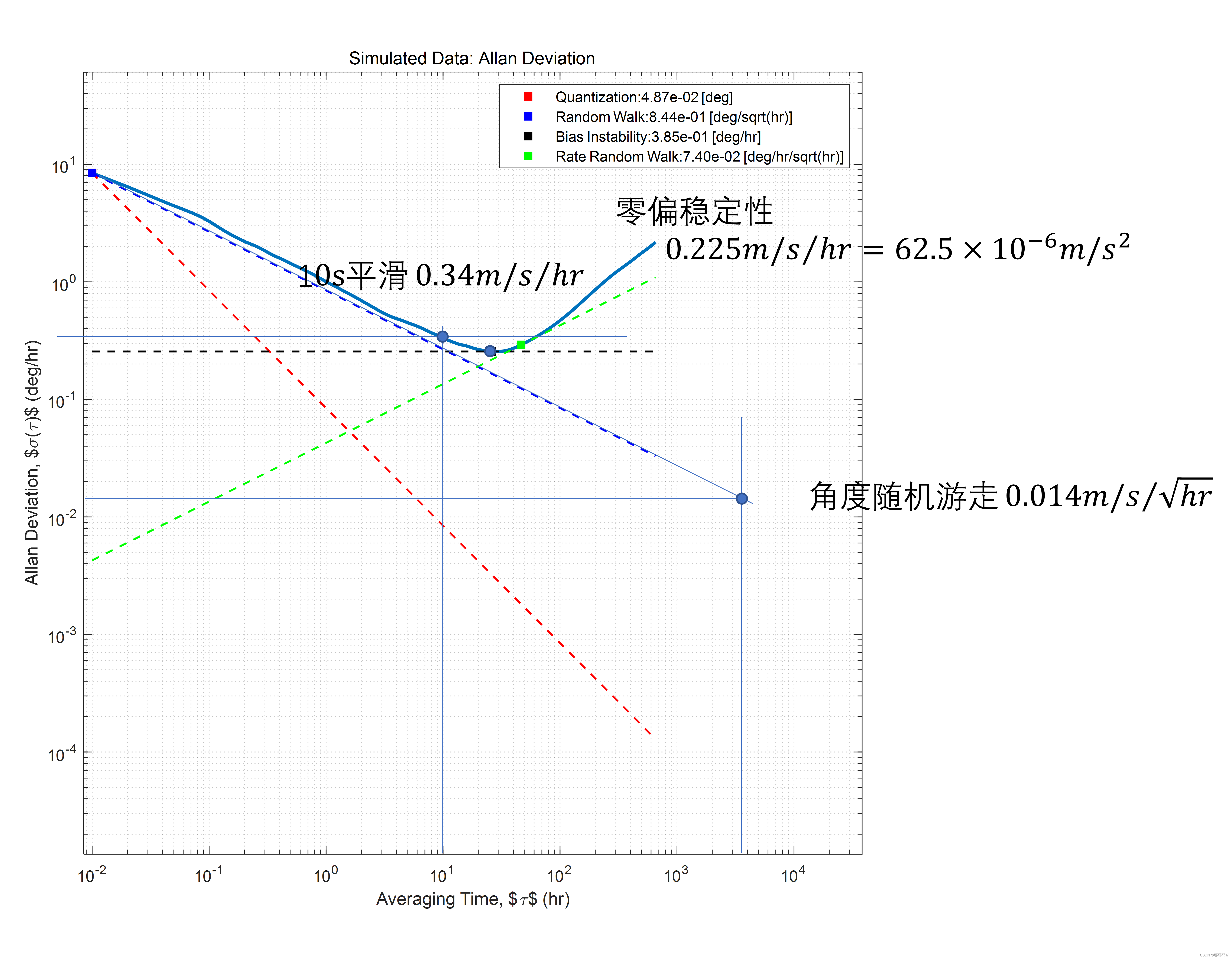
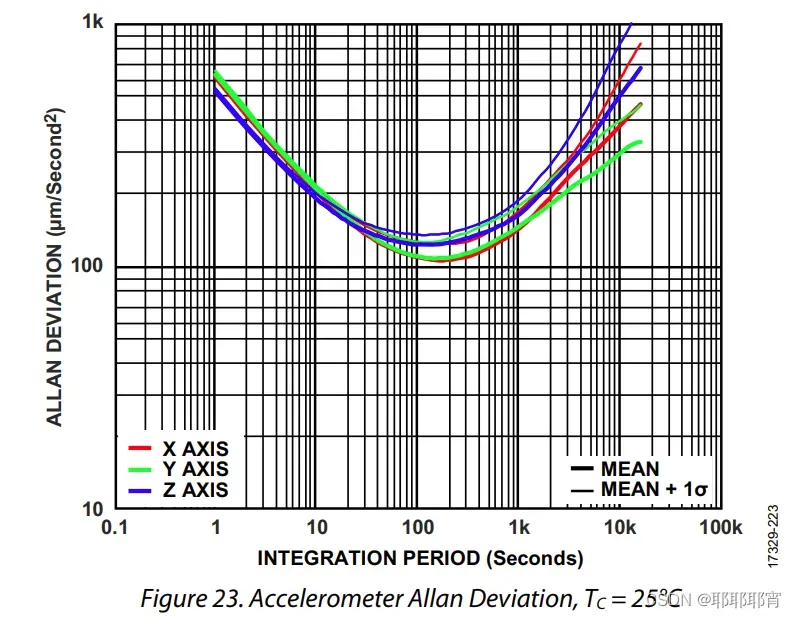
这是手册上给出的ALLAN方差曲线以及标称值。本次实验数据稍微优于手册上的标称值。
 3.总结
3.总结
Allan方差分析的使用要点-高精度捷联惯导算法
1.Allan方差分析的一个用途是分析陀螺的性能或对比不同陀螺的性能,如前3所述,相比于其它分析法Allan法还是很好用的,比较全面。另一个用途是获得噪声参数,用于组合导航的Kalman滤波噪声参数设置。不是所有的Allan方差噪声系数都有用,主要有用的是角度随机游走系数(用于设置Q阵)和零偏不稳定性系数(用于设置一阶马氏过程的方差),其实这两个系数量级大小差不多就行了,太精细也没用,毕竟Allan方差分析得出的陀螺静态性能,鬼知道实际应用动态的时候陀螺误差会变化多大,存在数量级差别都很有可能。
ALLAN方差只是大概判断陀螺仪/加速度计精度的一种手段,只是表现了静态性能,动态性能还得看振动对陀螺偏置影响系数Vibration Rectified Error (VRE)更为重要。
2.采用“三段论”大概读图计算角度随机游走系数、零偏不稳定性和角速率随机游走(或速率斜坡)即可,完全可满足实际应用。试图提取精确的陀螺仪指标是没有意义的。
分享ADI的一个视频,对IMU原理以及误差参数的讲解十分细致。
文章出处登录后可见!