



在FireFly RK3588开发板上烧录了Ubuntu20.04系统,在此基础上线部署下简单的Python版本yolov5代码,目前博主已全部转为C++版本了,并且转化了pt模型为rknn模型,调用npu进行推理,置信度和速度都比原先Python代码好很多。本篇主要介绍如何部署和运行yolov5官方的目标检测代码。
🍉1、安装anaconda
Anaconda是流行的Python/R数据科学和机器学习平台,用于大规模数据处理,预测分析和科学计算。Anaconda附带了250个开源数据包,并且可以从Anaconda存储库中安装超过7500个其他包。 它还包括conda命令行工具和称为Anaconda Navigator的桌面图形用户界面。
1、进入Anaconda官网,下载安装包,注意文件后缀是你的系统架构,比如x86、amd64或者aarch64,可以通过下面命令查看。


2、cd到你的下载目录,然后bash Anaconda3-2022.05-Linux-aarch64.sh,进行安装,会看到以下画面:
Welcome to Anaconda3 2022.05
In order to continue the installation process, please review the license
agreement.
Please, press ENTER to continue
>>>
3、按ENTER继续。要滚动浏览许可证,请使用ENTER键。审查完许可后,将要求您批准许可条款:
Do you approve the license terms? [yes|no]
4、键入yes接受许可,系统将提示您选择安装位置:
Anaconda3 will now be installed into this location:
/home/firefly/anaconda3
- Press ENTER to confirm the location
- Press CTRL-C to abort the installation
- Or specify a different location below
5、默认位置对于我们大多数用户来说已经就可以,按ENTER确认安装位置。安装可能需要一些时间,完成后,脚本将询问您是否要运行conda init,键入yes。
Installation finished.
Do you wish the installer to initialize Anaconda3
by running conda init? [yes|no]
6、这会将命令行工具conda添加到系统的PATH中。要激活Anaconda安装,您可以关闭并重新打开终端,或者通过键入以下命令来将新的PATH环境变量加载到当前的shell会话中:
source ~/.bashrc
7、这样就是成功了安装了Anaconda,现在我们创建一个python3.8的名称为yolo的环境。打开终端,输入conda create -n yolo python=3.8回车,输入y确定,等待创建成功即可。

如果你是Windows系统,可以看下win10的anaconda安装配置教程
🍑2、配置yolov5环境
1、从github官网或者gitee镜像网站下载yolov5的代码,我这里下载的是v6.0版本,如果你直接下载的话默认的是最新版(latest),为了保证能顺利运行,建议和我下载一样的版本。然后下载它对应的预训练模型weights,weights分为s,m,l,x四个尺寸的模型文件,我这里就下载了yolov5s.pt,保证模型的运行速度更快。然后把它放在根目录下,如下图所示:


2、进入我们在第一步安装好的anaconda环境,输入下面命令创建名为yolo的python3.8环境:
conda create -n yolo python=3.8
创建完成之后,输入命令激活环境:
onda activate yolo
看到终端前面的括号变为yolo即可。
3、在volov5-6.0下的requirements.txt,把numpy == 1.17的 ==1.17删去,然后到该文件夹下的终端中输入
pip3 install -U -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple
即可全自动安装前十一个依赖项(-i 选项指定了清华源,速度很快)。

4、安装COCOAPI
进入github,clone下来,在子文件夹PythonAPI下打开终端,输入make或者python setup.py --user即可安装。如果有报错则可能是缺少依赖或者版本不对,那么用pip安装指定版本即可。

至此,yolo所需的环境配置完成,是不是非常简单,毕竟这些操作都应该是大学生必备技能!
🍦3、运行yolov5算法
1、为了看起来更加舒服,我们安装个VS Code作为我们的IDE,进入VS Code官网:
我们拖到最下面,根据自己ubuntu的架构选择,比如我是x86_64,点击Linux的64bit的deb然后下载。


下载成功后,右击压缩包安装即可,或者输入命令进行安装:

sudo dpkg -i xxx.deb
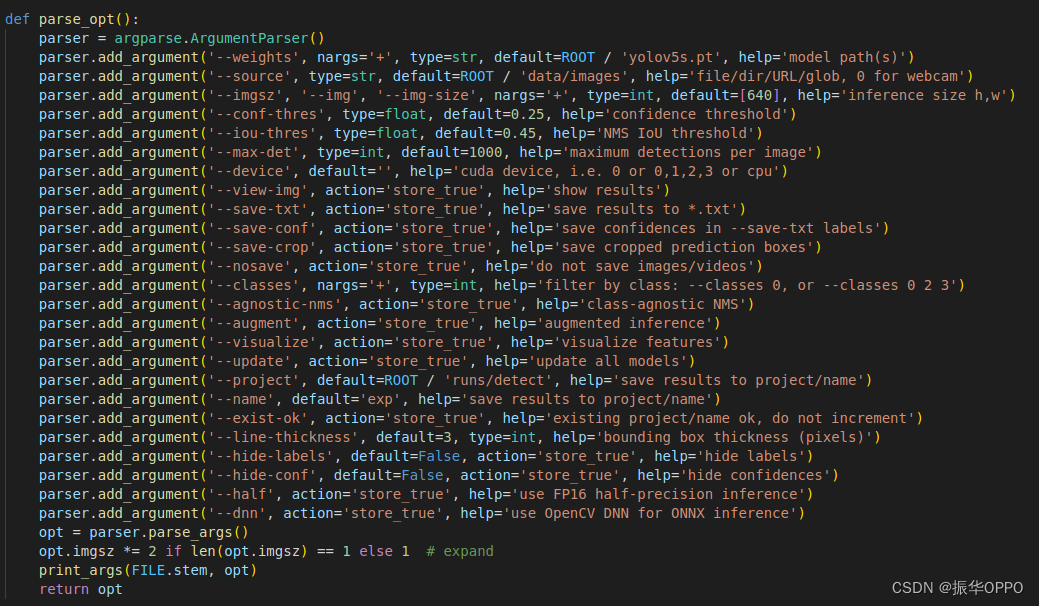
2、找到detect.py,可以在source这里修改输入源参数,可以是图像、文件夹、网络视频、rtsp视频流等,或者0调用自带摄像头。

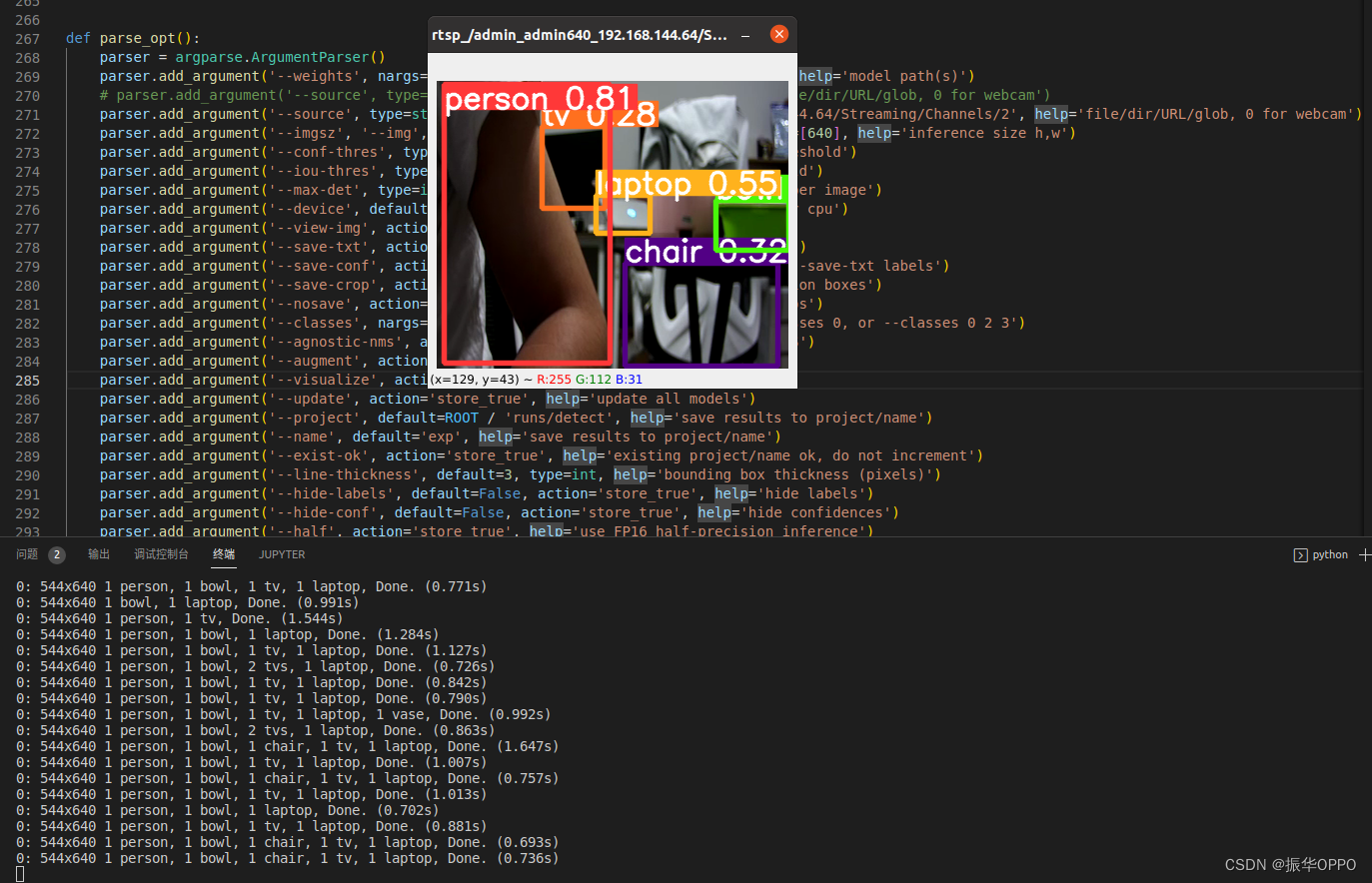
3、然后终端进入我们创建的yolo环境,输入python detect.py即可运行。可以看到窗口中是我的IP相机的rtsp流,每个不同类别的目标都有不同颜色的检测框,上面是目标的类别和置信度(预测概率),控制台是每一帧检测情况的日志。
输入命令也可以加上很多参数,比如–source指定输入源,–weights指定权重文件等。

至此,你已经成功运行出yolov5算法了,是不是很简单直接呢~作为目标检测最经典的算法,是我们计算机视觉研究者必会算法之一,关于yolov5的网络结构,可以看下它的论文和网上视频。目前yolov7已经出来了,算法更新速度真的非常快。
文章出处登录后可见!