👉👉👉**无人机硬件,提供全程指导**👈👈👈
文章目录
前言
QGC地面站版本:
V4.0.8
Ubuntu 18.04
PX4固件
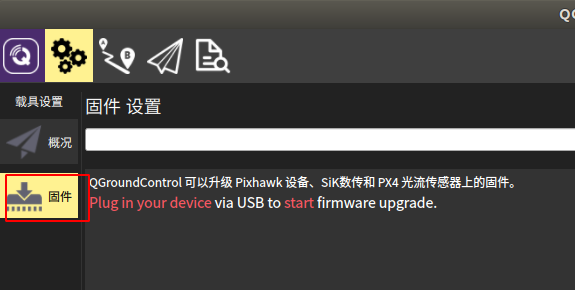
一、下载固件
先不连接飞控,点击如下页面,然后用USB将飞连接电脑,注意飞控不要用电池或其他USB以外的设备供电
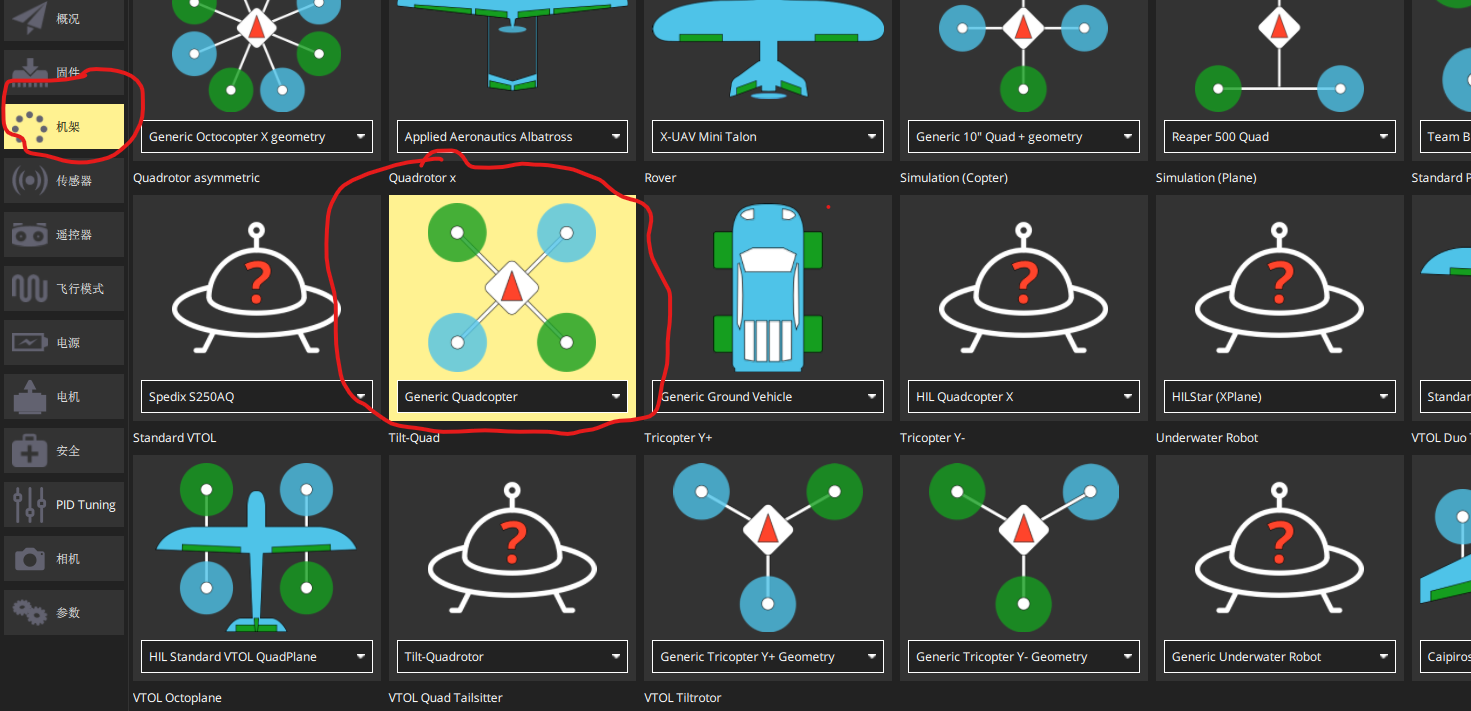
二、选择机型
将飞控连接至地面站,将机架设置为自己想设置的机型
然后电机右上方“应用并重启”
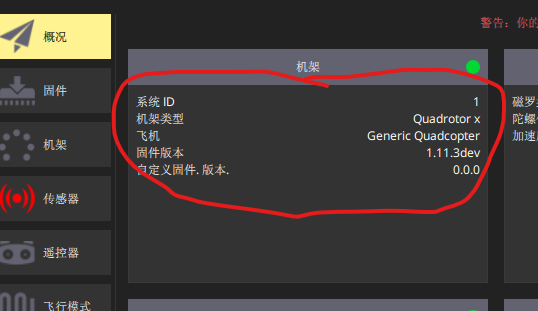
重启后如图:
三、校准
将飞控通过数传链接QGC地面站
1.校准罗盘
选择传感器->罗盘->确定,开始校准
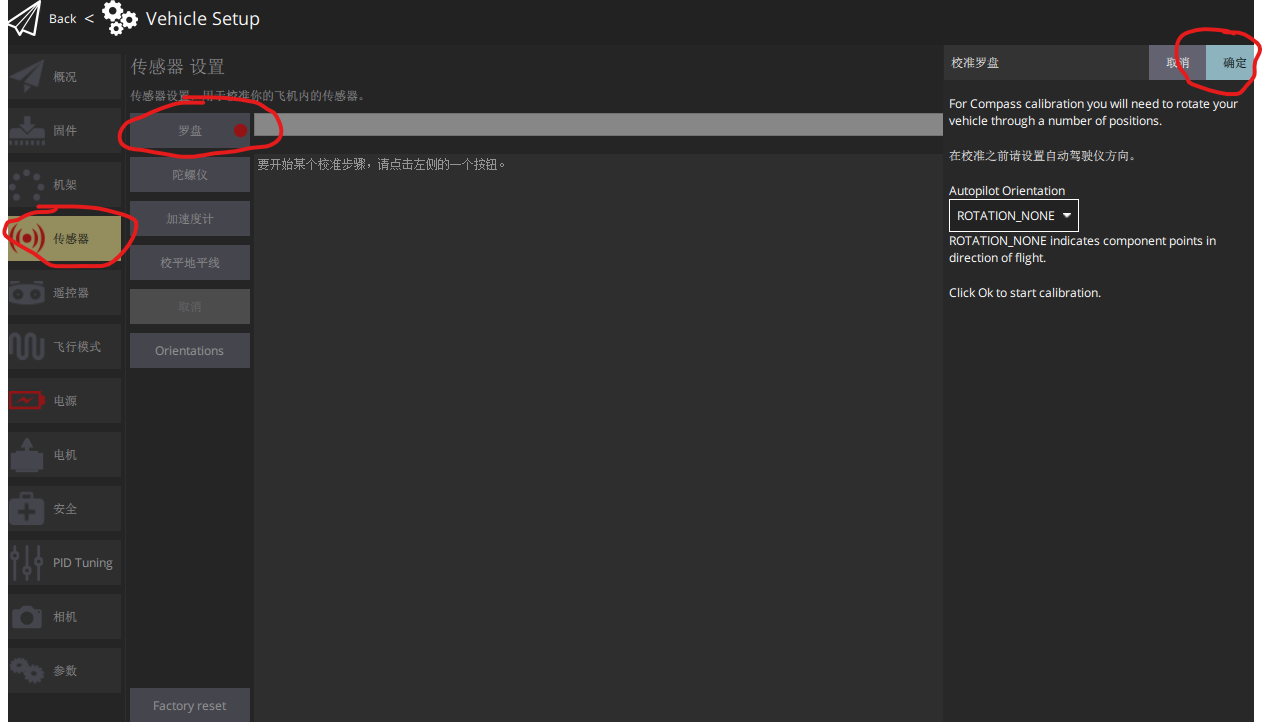
将无人机置于红色所示的任何方向,并保持静止。出现提示后(方向图像变为黄色),沿任意/两个方向绕指定轴旋转车辆。当前方向校准完成后,屏幕上的相关图像将变为绿色。
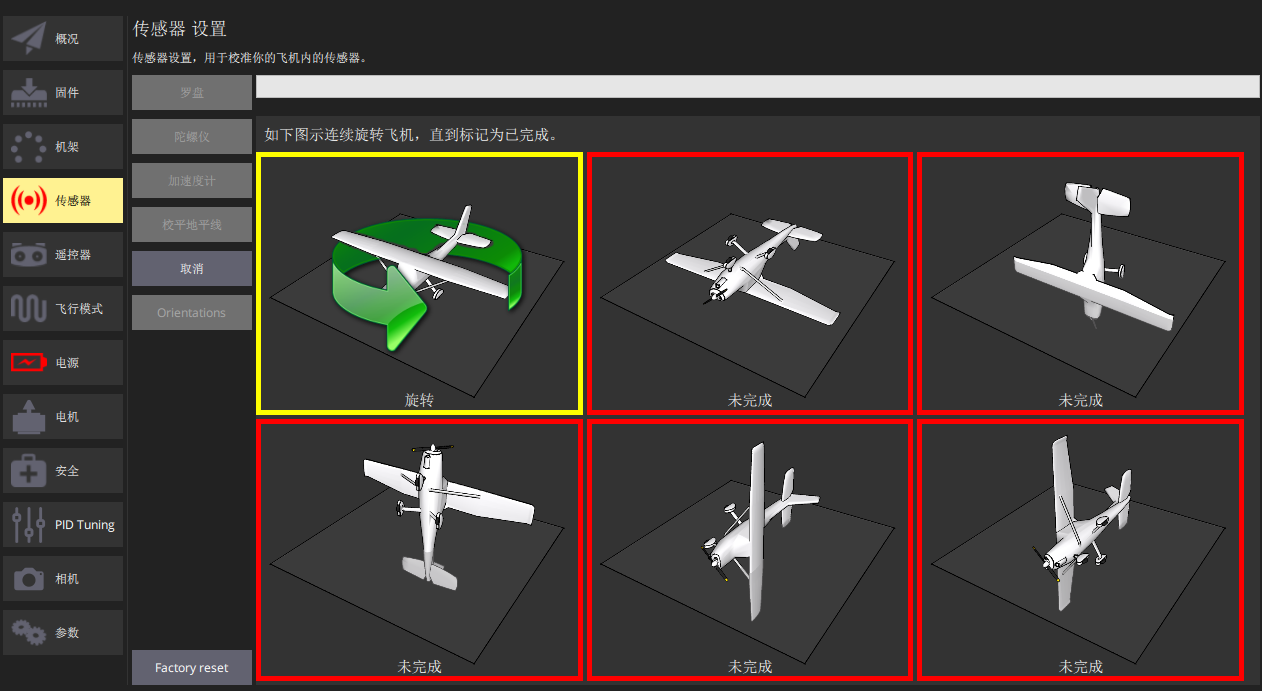
对所有方向重复校准过程。
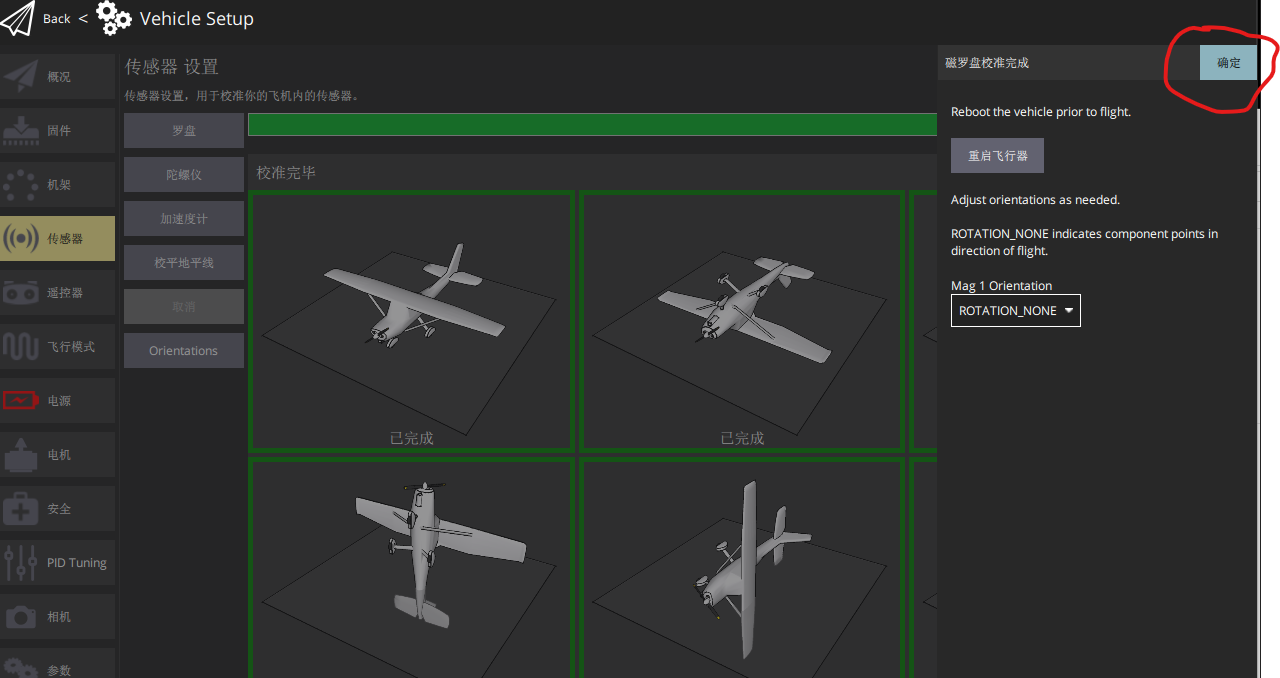
在所有方向校准完毕后,QGroundControl将显示Calibration complete(校准完成)(所有方向图像将显示为绿色,进度条将完全填满)。然后可以继续下一个传感器。
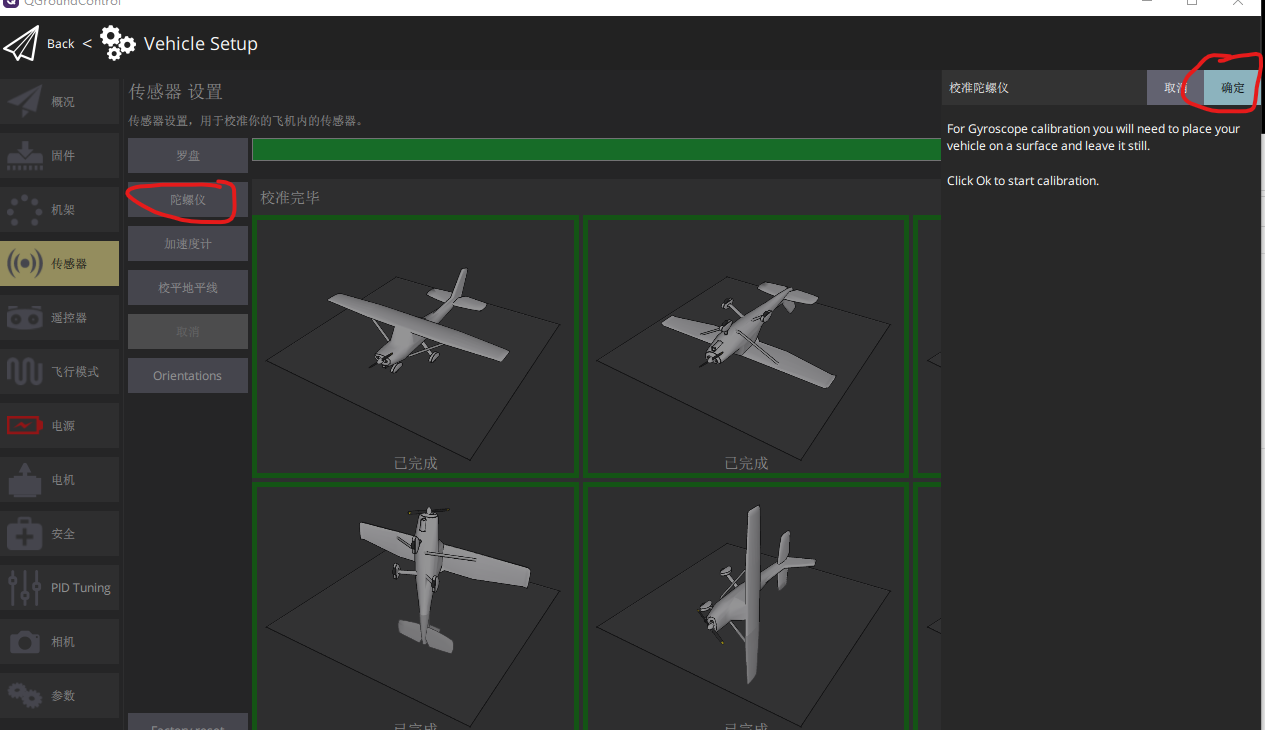
2.校准陀螺仪
单击陀螺仪传感器按钮,将无人机水平放在地面上,保持静止。单击“确定”开始校准。顶部的条形图满代表校准成功
3.校准加速度计
单击加速计传感器按钮,单击“确定”开始校准。
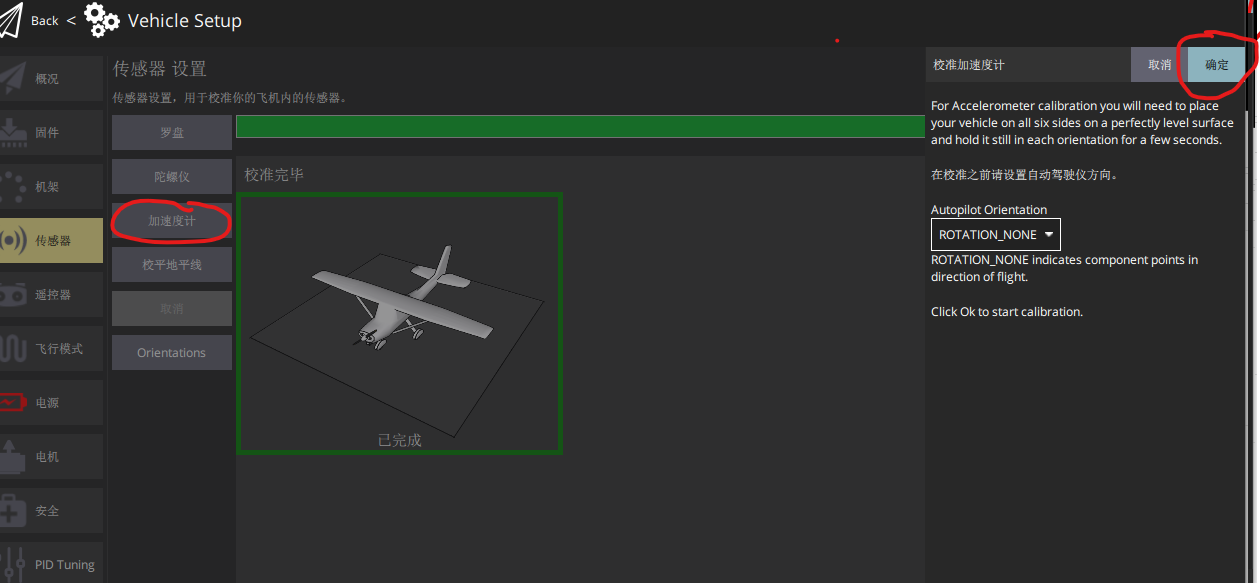
根据屏幕上的方向提示,当方向图像变为黄色,保持无人机静止。当前方向校准完成后,屏幕上的相关图像将变为绿色。
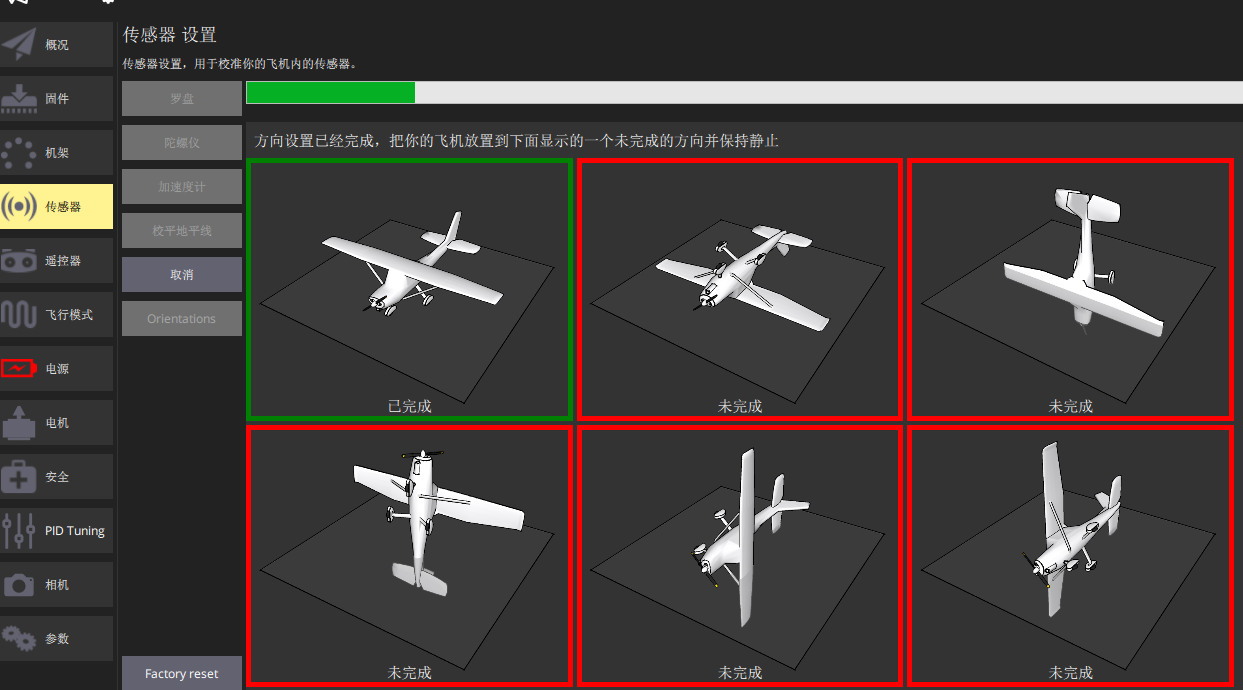
对所有向重复校准过程。在所有位置校准车辆后,QGroundControl将显示Calibration complete(校准完成)(所有方向图像将显示为绿色,进度条将完全填满)。
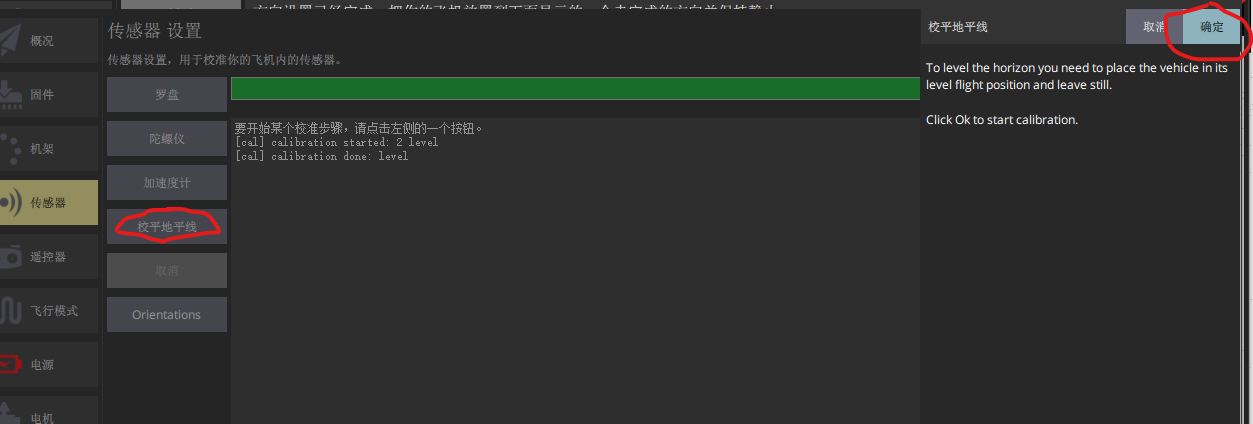
4.校准地平线
如果不校准地平线,无人机在非定点飞行中位置可能持续的漂移。
将无人机置于水平面上,点击校平地平线->OK,然后保持静止,直到绿色进度条满
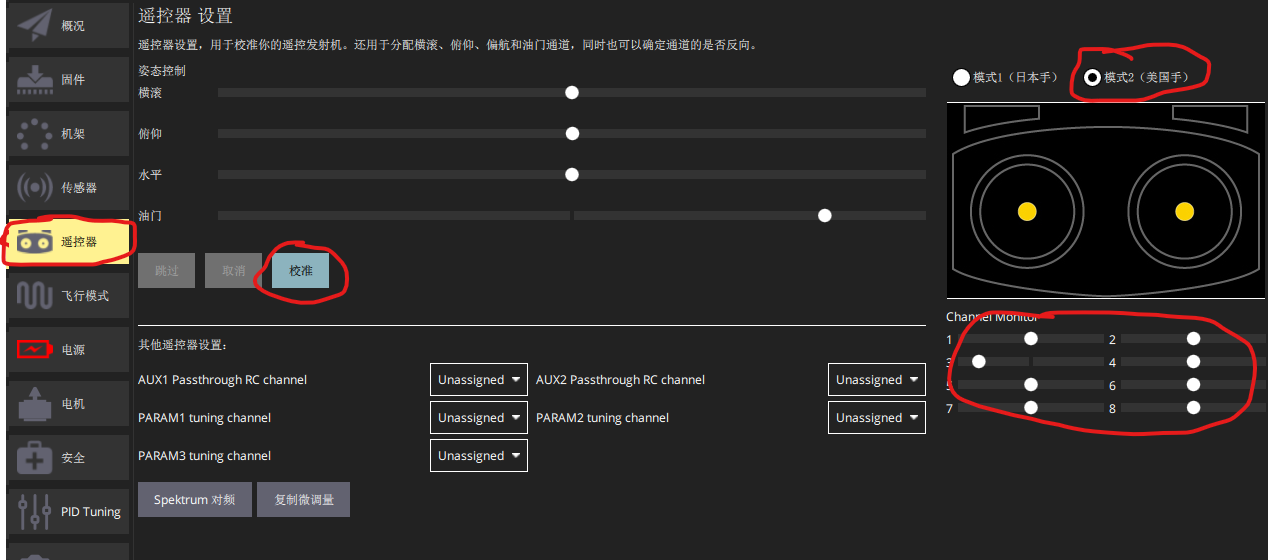
5.校准遥控器
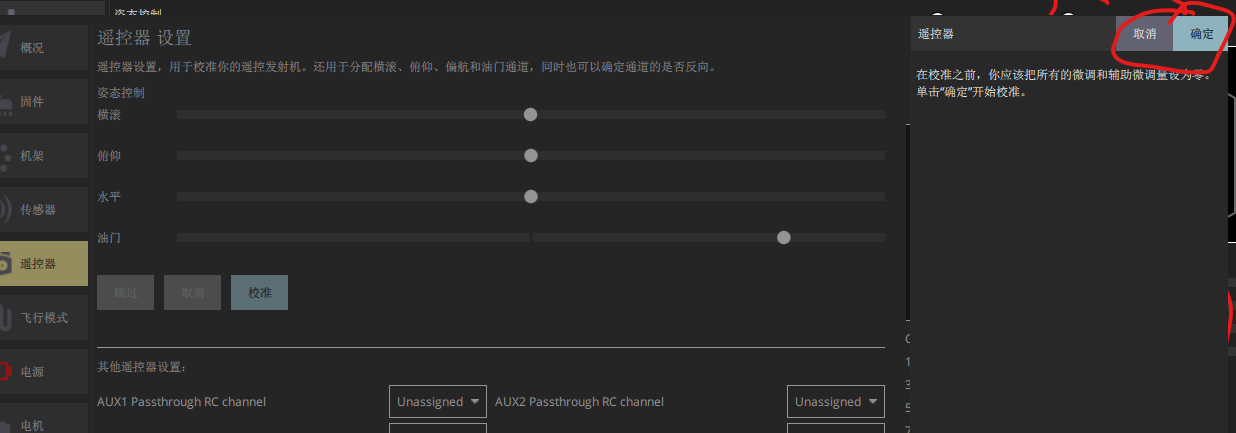
打开遥控器,切换到遥控器页面,检查右下角是否能识别到通道,如果能识别到通道,就可以进行校准,选择右上角的操作方式,然后点击校准
然后点击“确定”
再点击“下一步”
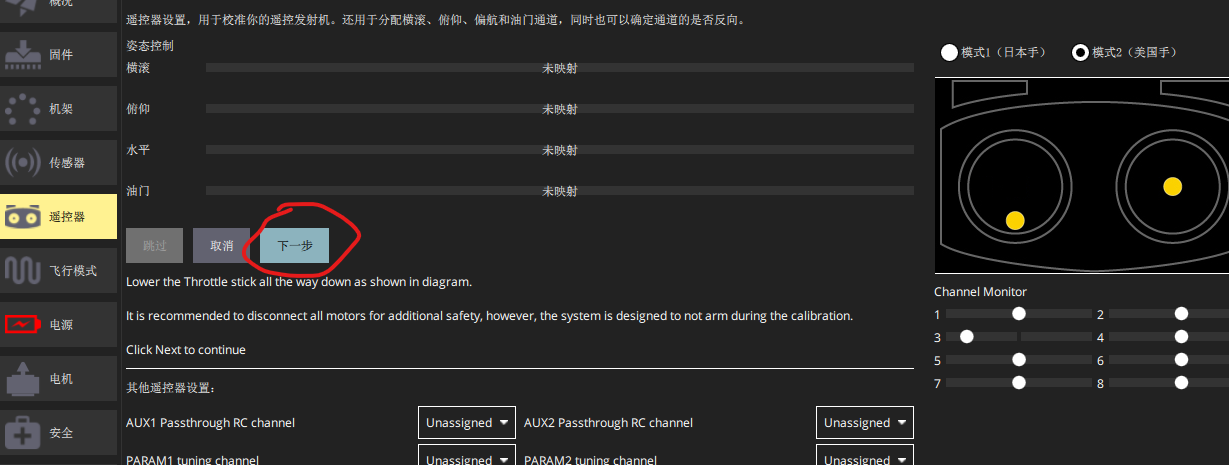
将遥控器摇杆移动到下图中指示的位置。
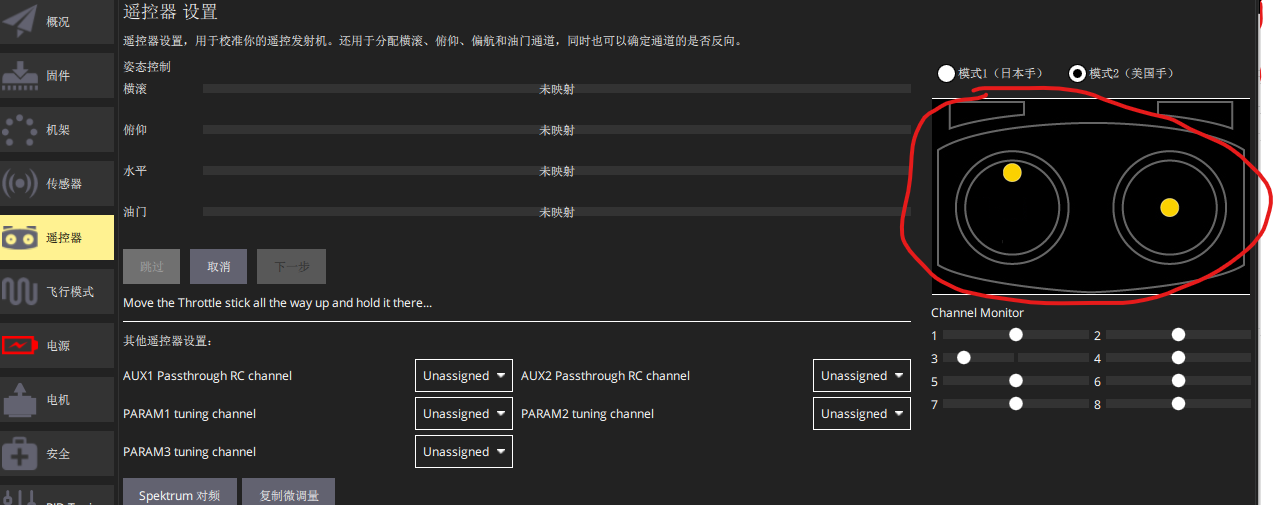
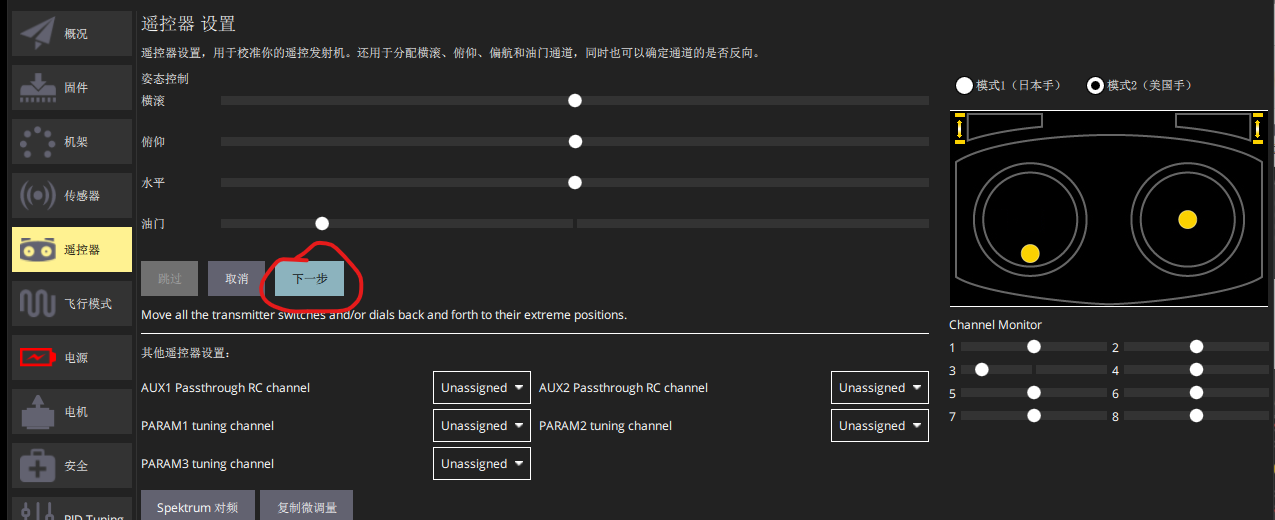
当杆就位时,地面站会提示下一个需要拨的位置,拨完所有位置后,按两次“下一步”保存设置。
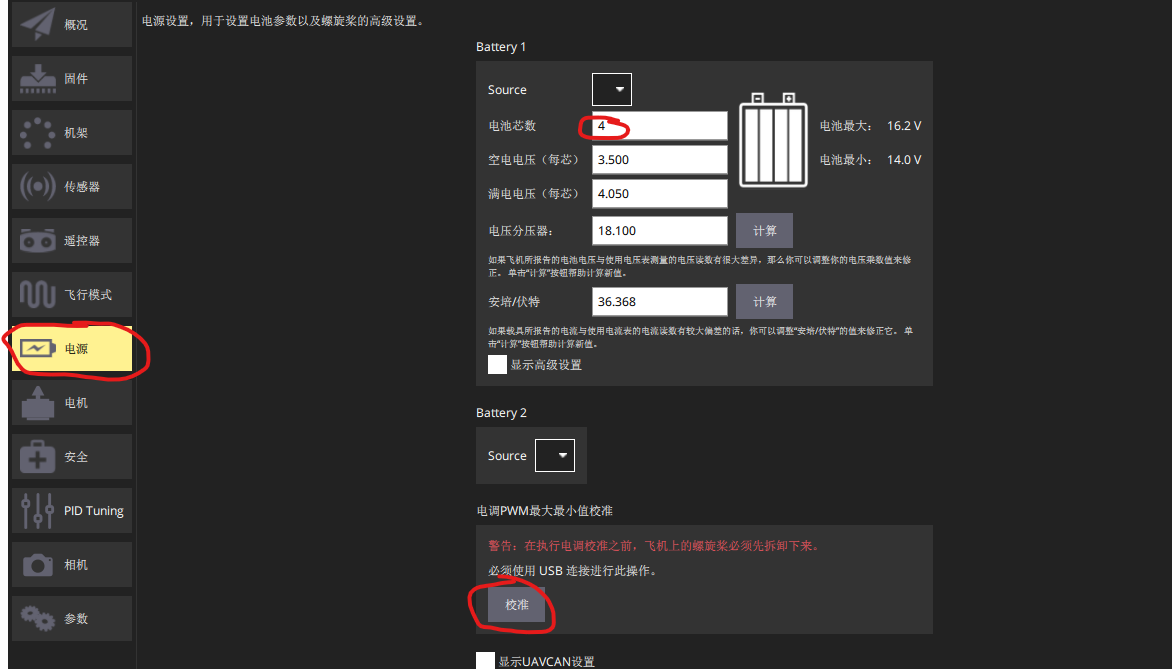
6.校准电调
校准电调时,用USB将飞控连接到地面站,不接电池,不装浆叶,电调的信号线接到飞控上。
切换到“电源”页面,输入电池芯数并回车,点击“校准”,然后插上电池即可校准。
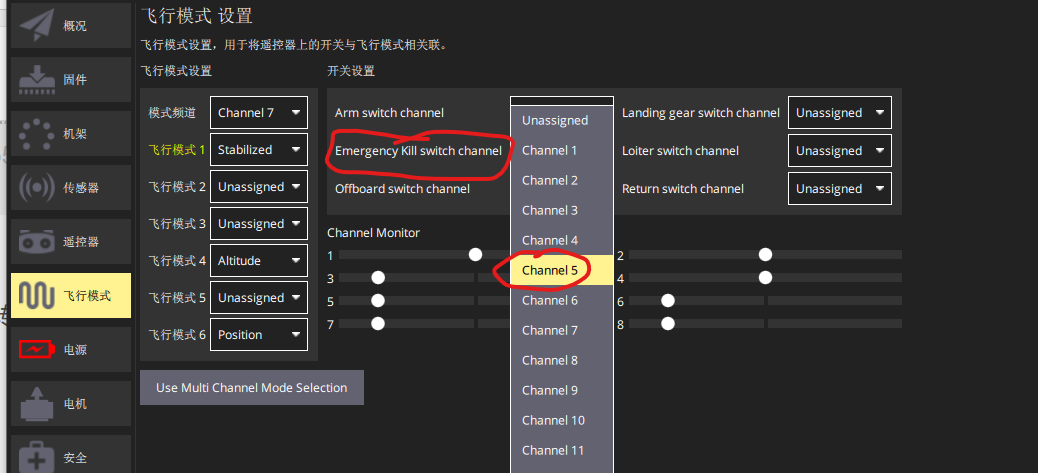
四、设置遥控器拨码开关
切换到飞行模式页面,可以先拨一下需要设置的遥控器拨码开关,看其在地面站中对应的是哪个通道。
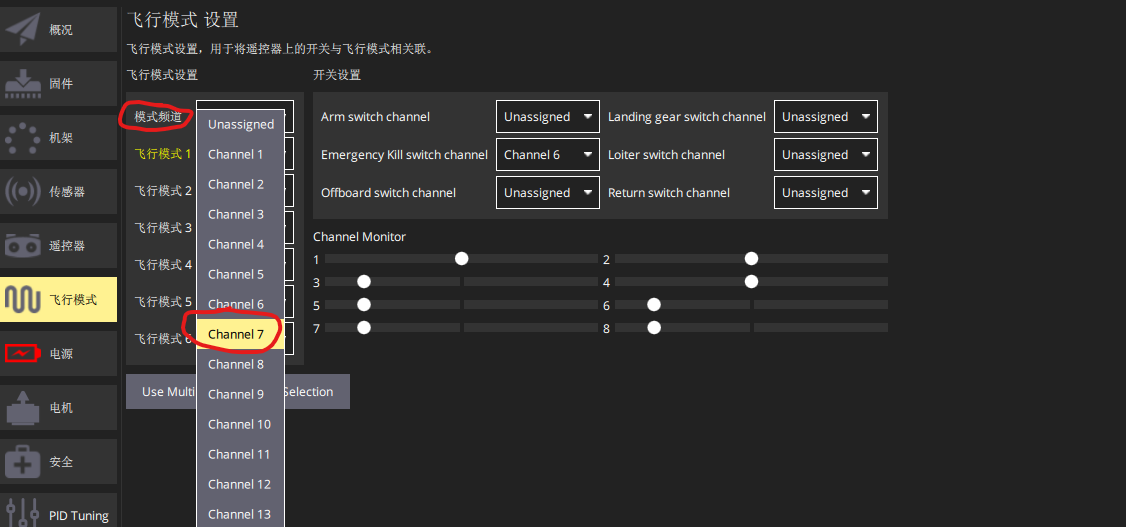
1.设置飞行模式切换开关
点击“模式频道”右侧的复选框,设置相应的遥控器拨码开关通道。
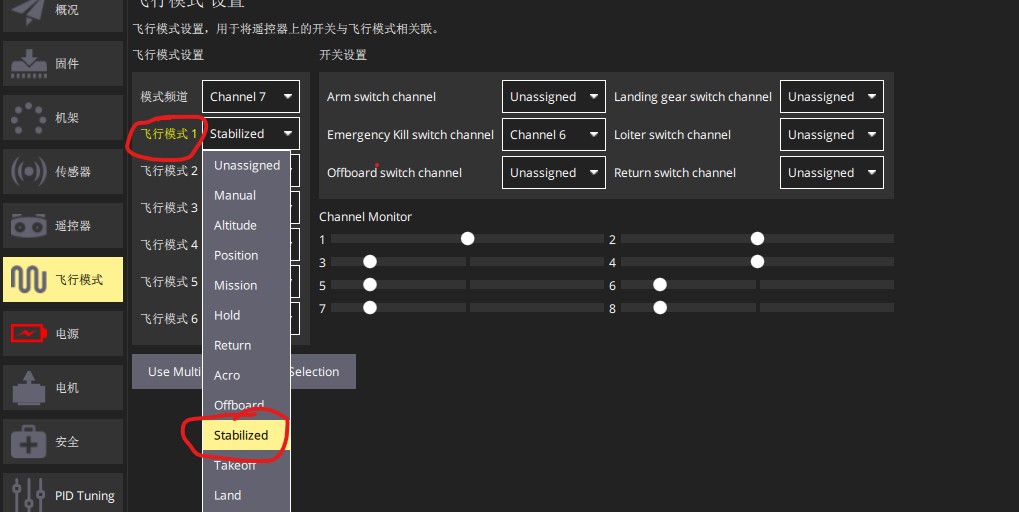
然后分别设置三档对应的飞行模式。
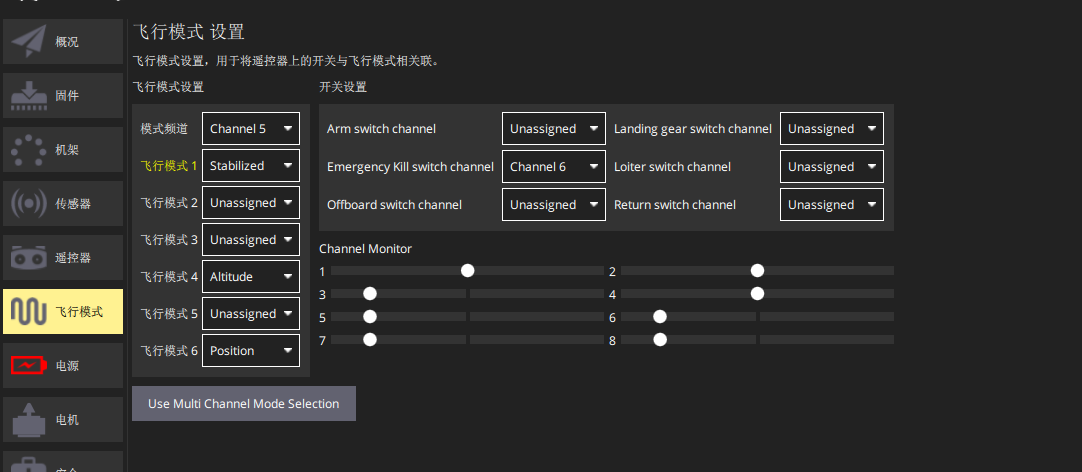
2.设置其他切换开关
其他的开关通道在飞行模式右侧,如下,需要设置哪个,就把这个开关右侧的遥控器通道进行设置即可,我这里设置了一个刹车(Kill switch),通道为遥控器的第五个通道。刹车的作用是使电机直接停转,可根据需要进行设置
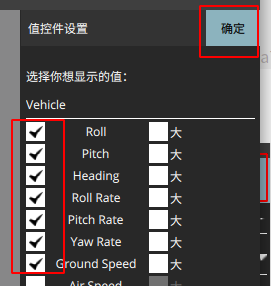
五、飞行视图页面设置
设置飞行页面需要显示的值,点击下图图标

需要显示什么,就在相应的左边打勾,最后点确定
六、航路规划
注意航路规划时,设置完航点后,页面左下角有一个“地形高度”那一栏,标红的航点说明对应的航点高度不可达。默认的高度是相对于起飞点的高度,例如起飞点的高度是5米,那么每个航点的高度至少要大于5米才不会标红,如果小于5米就会标红,标红的话就无法执行任务模式了。
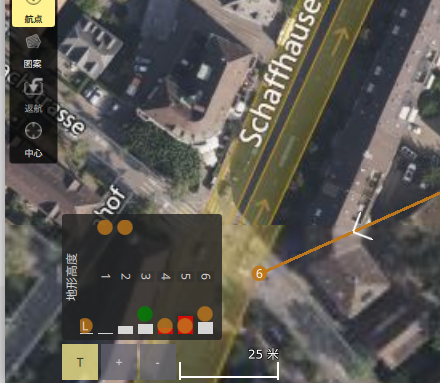
如果标红的话,可以把高度改高一点,或者改成相对于地形的高度,如下。

1.手动打点
点击文件-》空白

默认必须先设置takeoff点,才能设置其他航点

如果想不设置takeoff点直接设置航点(例如无人船等载具),可以在地面站常规设置中勾选下图选项:
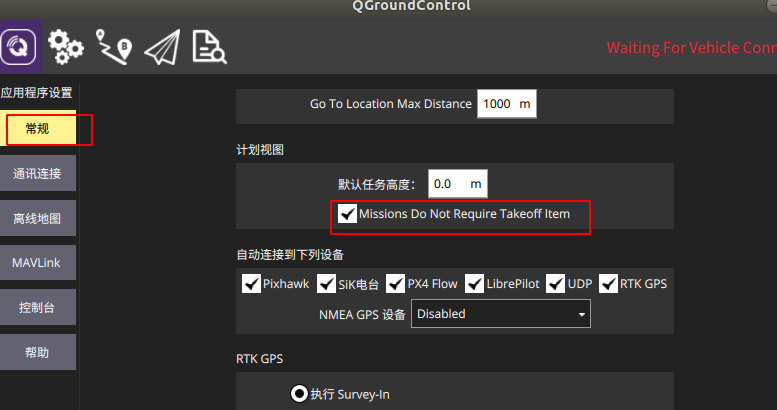
然后就可以不用设置起飞点直接设置航点了。

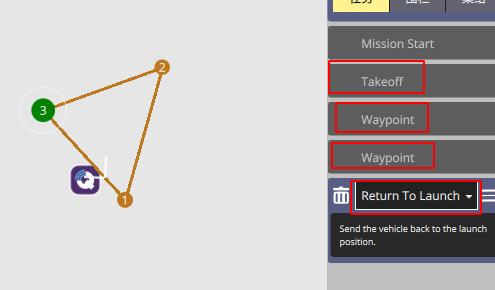
点击“takeoff”后,会在无人机当前位置生成起飞点,然后再点击“航点”按钮,然后在地图上点击即可设置航点位置。设置完的航点也可以鼠标左键选中后进行拖动改变其位置。
我这里在点击起飞点后,继续设置了三个航点,一共四个点,如下图,地图右侧有每个行点的设置页面。
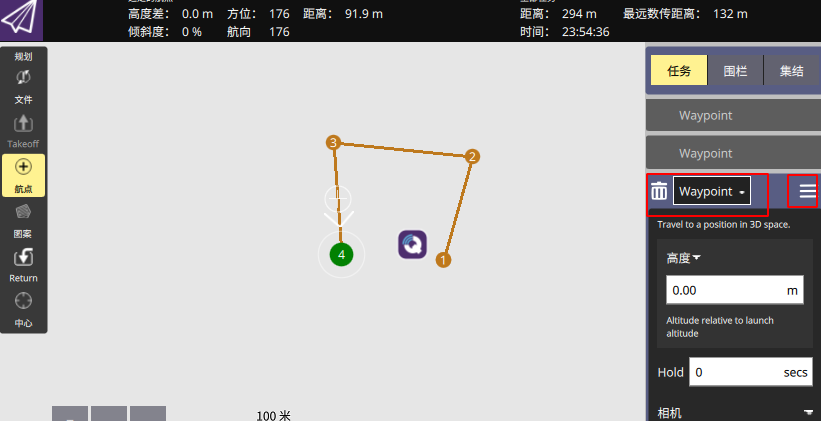
点击相应航点左侧的小垃圾桶图标可以删除航点。
点击小垃圾桶图标右侧的Waypoint可以设置点的类型,默认是Basic类别,下面有Waypoint(航点)、Return To Launch(返回起飞点)、Land(降落)、Takeoff(起飞)四种,分别对应到达该航点后执行的动作。
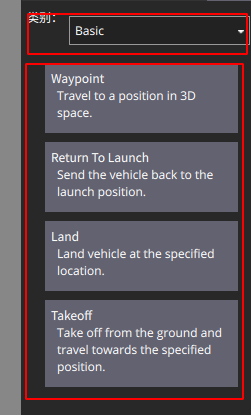
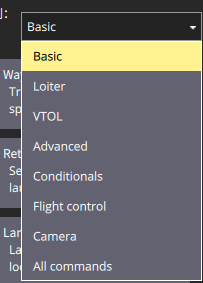
上面四种点对于普通四旋翼的使用来說已经够了,但是如果需要执行一些高级一些的动作(如垂起模式切换),需要在下面的其他类别中去找。
我这里将第一个点设置为起飞点、第二和第三个点设置为航点,第四个点设置为返航点,这样的话无人机会起飞并先飞到第二个点,再飞到第三个点,在到达第三个点后返航到起飞点。
在Mission Start那一栏可以设置航点高度和飞行速度等值,这一栏的设置会对所有任务点都有效。
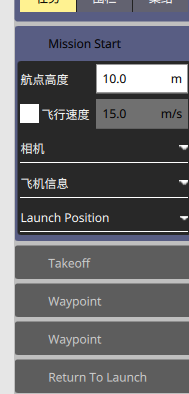
在每个任务点里面也可以设置高度和停留时间等值,但这里的设置只对该任务点有效,在每个任务点的右侧有一个三道杠的图标,可以点击该图标设置该任务点的更多信息
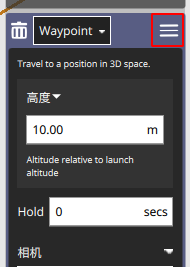
如下图:
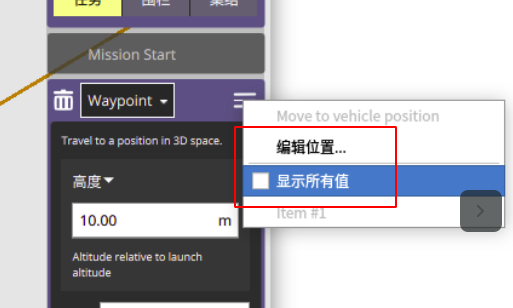
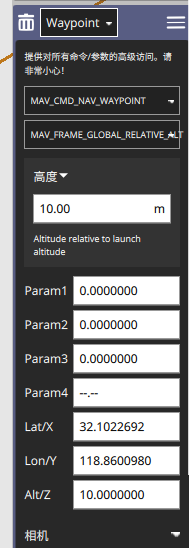
“编辑位置”可以对位置进行详细编辑

“显示所有值”可以对任务点的所有参数进行编辑
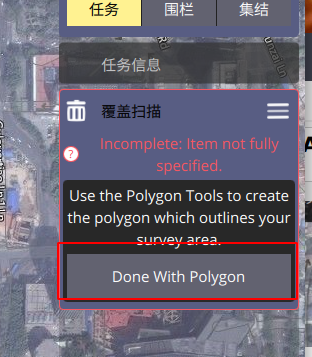
2.矩形波式测绘规划
点击图案-》测绘

点击勾画,然后在地图上点多边形的顶点

点完后点勾画完毕
点击下图进行编辑
可以设置间隔,角度,转弯距离等

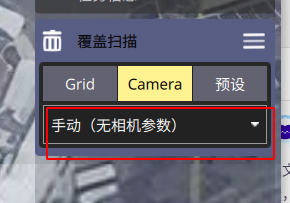
如果想把下图设置航线距离的单位换成米

可以把相机禁用就行了

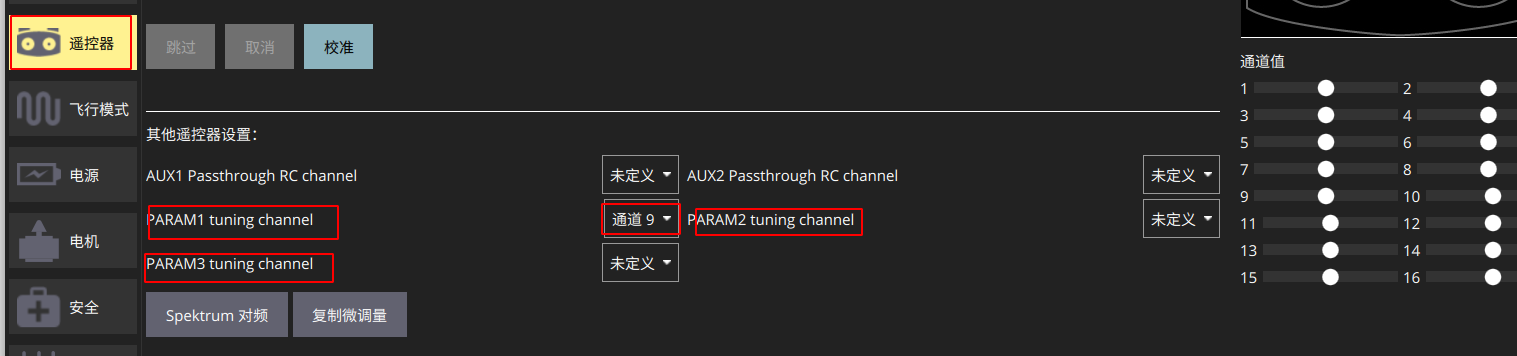
五、设置遥控器调参通道
通过设置调参通道,可以将遥控器的某一个通道(如旋钮)映射到PX4的一个参数当中,从而可以通过遥控器旋钮实时的调整PX4参数的值。
在下图先设置参数对应的遥控器通道,最多可以同时设置三个参数通道。
例如我这里遥控旋钮对应的是通道9,我将参数1的调参通道设置为遥控器的通道9.
然后将内环俯仰角速率映射到参数1上,点击下面的高级设置-》将遥控设到参数…
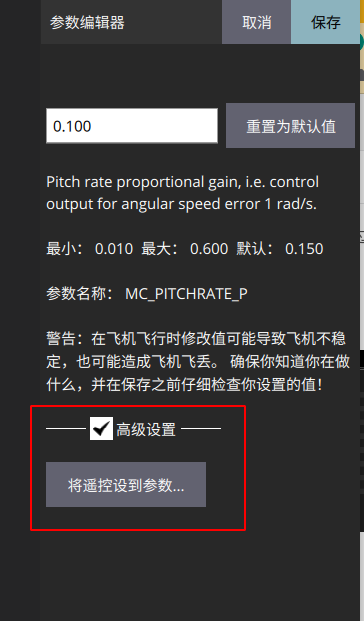
然后设置缩放倍数即可。设置完毕后可以动一下旋钮看看参数变化是否正常
文章出处登录后可见!