目录
非常详细的相机标定原理、步骤(二)_An efforter的博客-CSDN博客
(2条消息) 非常详细的相机标定原理(三)(张正友相机标定法初见和单应性矩阵)_An efforter的博客-CSDN博客
(2条消息) 非常详细的相机标定原理(四)(张正友相机标定法数学推导求解)_An efforter的博客-CSDN博客
非常详细的相机标定(五)(相机标定代码讲解)_An efforter的博客-CSDN博客
一、什么是相机标定
- 空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型
- 这些几何模型参数就是相机参数
- 这个求解参数的过程就称之为相机标定(或摄像机标定)
二、坐标系
1.世界坐标系(word Coordinate)
由于摄像机与被摄物体可以放置在环境中任意位置,这样就需要在环境中建立一个坐标系,来表示摄像机和被摄物体的位置,这个坐标系就成为世界坐标系。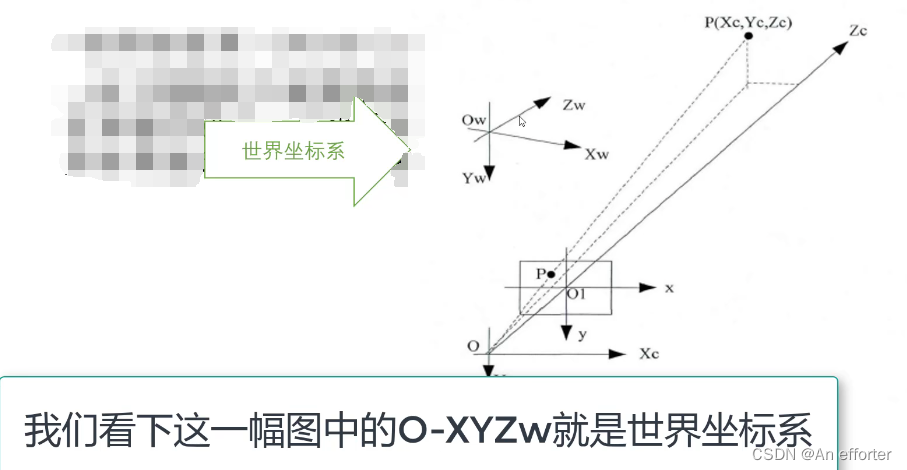
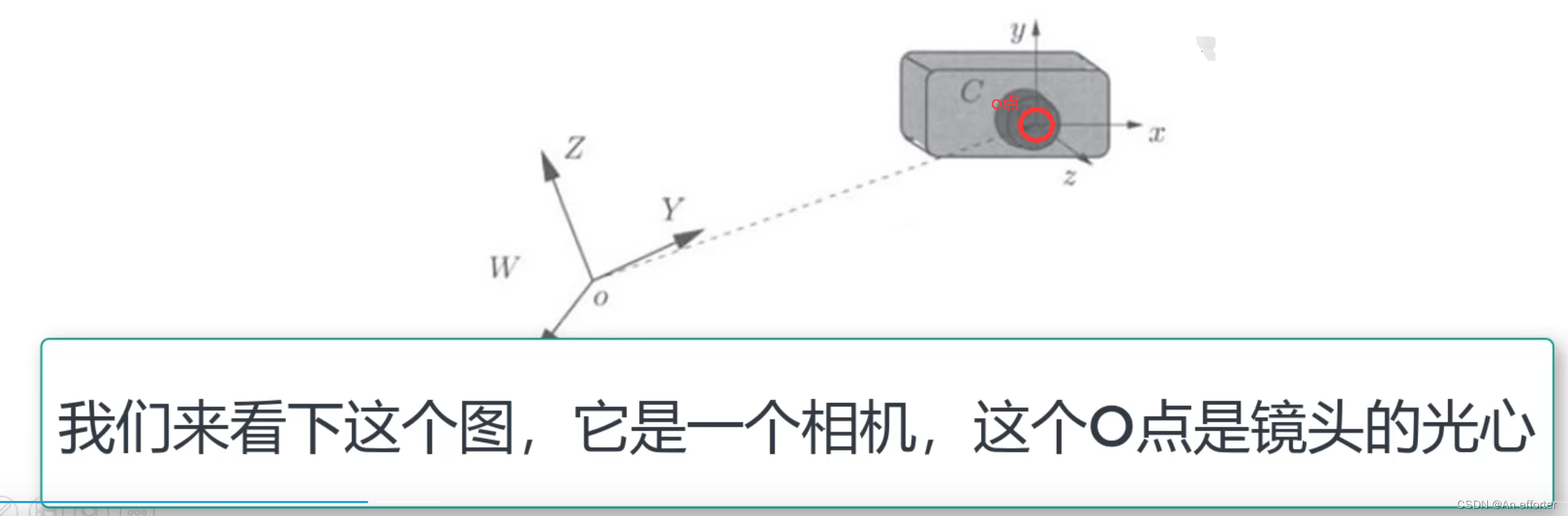
2.相机坐标系(camera coordinate)
一个三维直角坐标系,原点位于镜头光心处, x、y轴分别与相面的两边平行,z轴为镜头光轴,与像平面垂直。
3.世界坐标系到相机坐标系转换
三维物理坐标转化到相机平面的像坐标,其实就是一个过渡的过程,其中会有旋转与平移的操作。
旋转的表示有很多种:
旋转矩阵,欧拉角,四元数,轴角,李群与李代数
旋转的应用场景:
惯性导航,机器人学(机械臂运动学,无人机姿态估计, SLAM等)
简单的旋转:小红点不随着坐标轴的旋转变而变,始终是不变的。对应的关系如下:
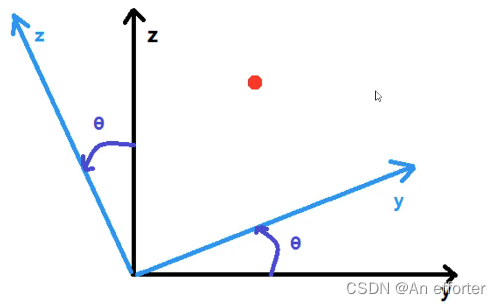
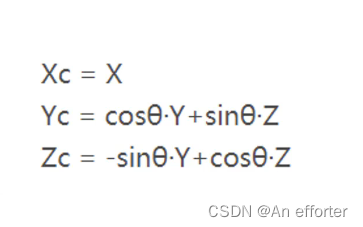
红点经过x轴转化,在新坐标系下具体的步骤进行分解:
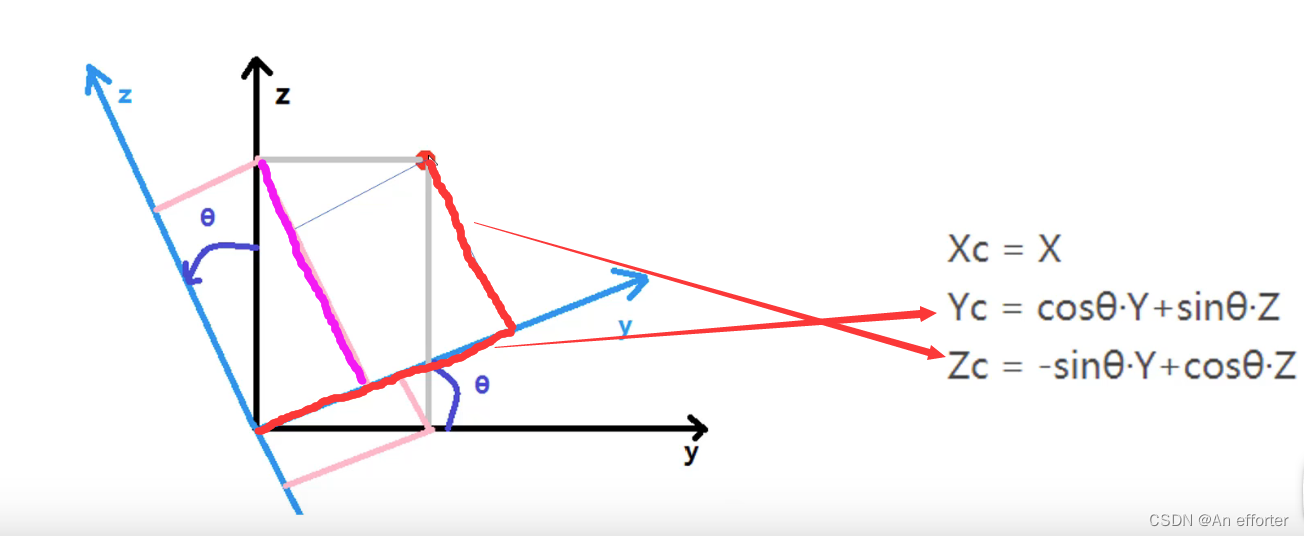
这是属于左乘的思想:左边乘以一个旋转矩阵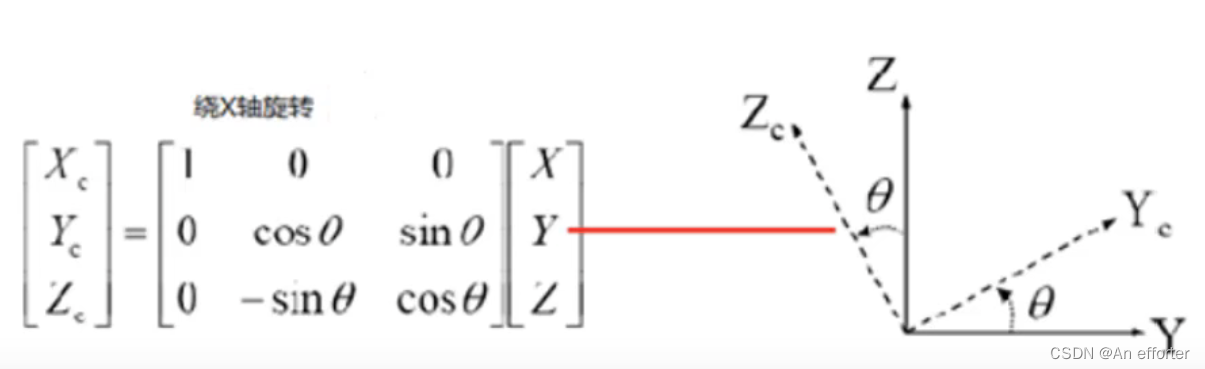
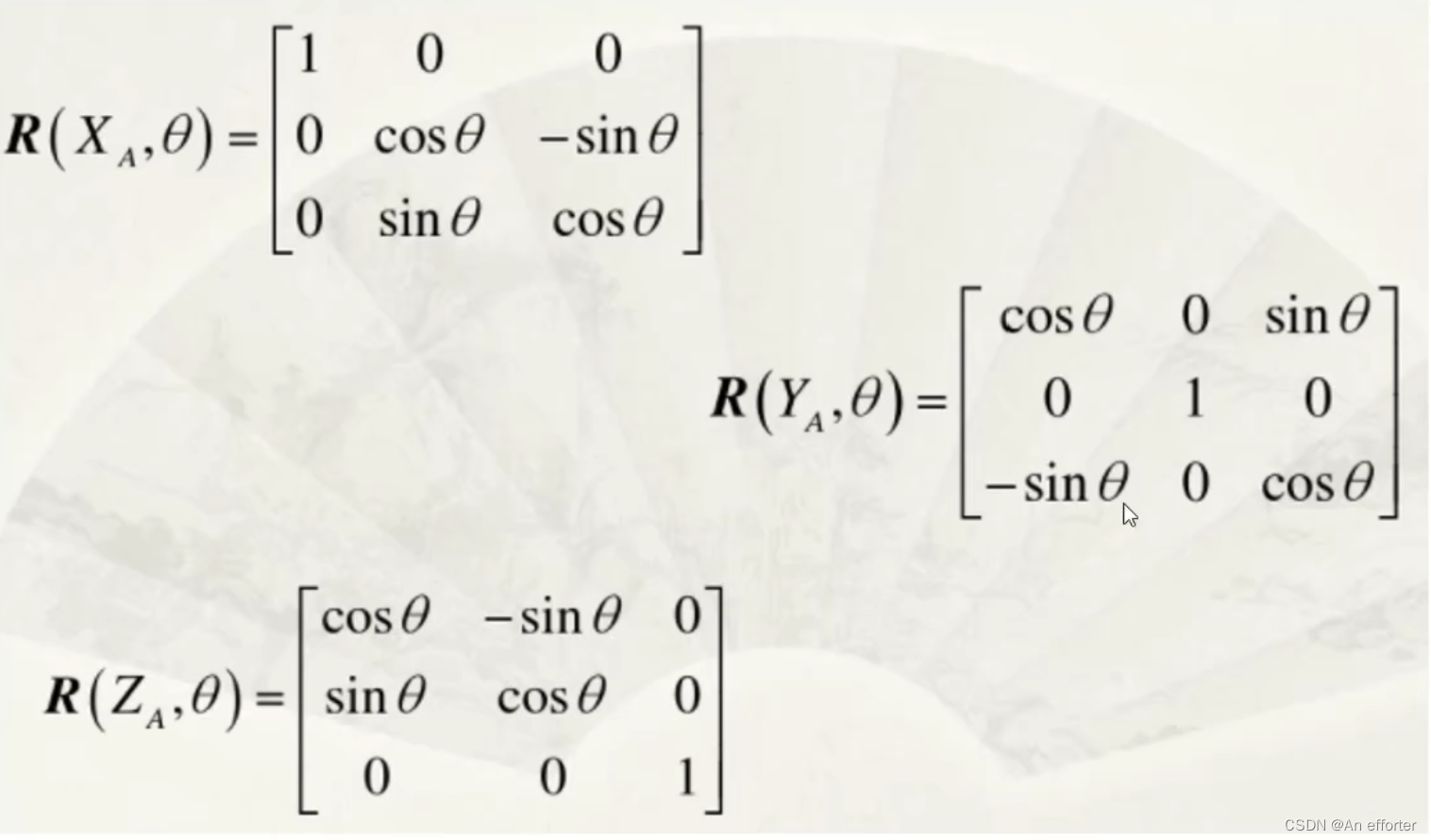
下面是关于按各个坐标轴转换矩阵,矩阵是右乘 的思想解法:[X,Y,Z] * R。
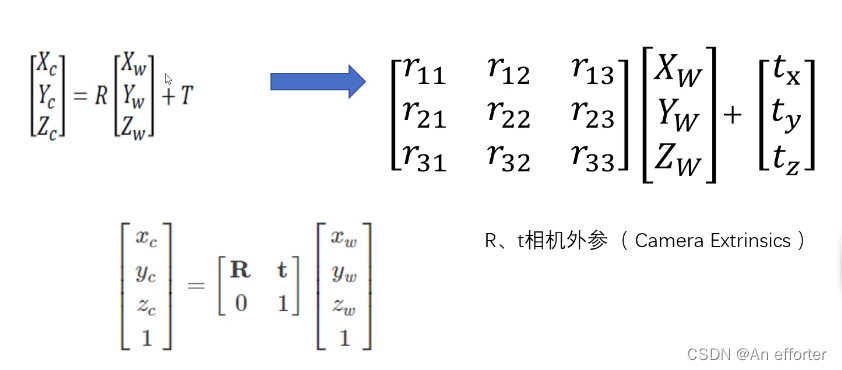
前面都是打基础,这个是世界坐标系到相机坐标系的关键步骤:注意看,R就是旋转矩阵,t是平移矩阵,都属于相机外参。最下面的公式为了得到4*4的矩阵,所有矩阵最后一格都设为了 1(线性代数的知识)。
三、总结:
- 为啥要把世界坐标系变到相机坐标系? 因为我们相机坐标系可以将图像的世界点联系起来。
- 啥是世界点? 一般情况下我们是需要测量物体到机器人的距离和位置关系,因此世界坐标系一般定在机器人上,或者是机器人工作的场景中。
- 世界坐标系与相机坐标系的关系就是相机的外参。
文章出处登录后可见!
已经登录?立即刷新