一、激光SLAM简介
基于激光雷达的同时定位与地图构建技术(simultaneous localization and mapping, SLAM)以其准确测量障碍点的角度与距离、 无须预先布置场景、可融合多传感器、 在光线较差环境工作、 能够生成便于导航的环境地图等优势,成为目前定位方案中不可或缺的新技术。
激光 SLAM 任务是搭载激光雷达的主体于运动中估计自身的位姿,同时建立周围的环境地图。而准确的定位需要精确的地图,精确的地图则来自于准确的定位,定位侧重自身位姿估计,建图侧重外部环境重建。
SLAM系统一般分为五个模块:传感器数据、视觉里程计、后端、建图及回环检测。
传感器数据:主要用于采集实际环境中的各类型原始数据。包括激光扫描数据、视频图像数据、点云数据等。
视觉里程计:主要用于不同时刻间移动目标相对位置的估算。包括特征匹配、直接配准等算法的应用。
后端:主要用于优化视觉里程计带来的累计误差。包括滤波器、图优化等算法应用。
建图:用于三维地图构建。
回环检测:主要用于空间累积误差消除
SLAM工作的主要流程为:
传感器读取数据后,视觉里程计估计两个时刻的相对运动(Ego-motion),后端处理视觉里程计估计结果的累积误差,建图则根据前端与后端得到的运动轨迹来建立地图,回环检测考虑了同一场景不同时刻的图像,提供了空间上约束来消除累积误差。
激光雷达采集到的物体信息呈现出一系列分散的、具有准确角度和距离信息的点,被称为点云。通常,激光SLAM系统通过对不同时刻两片点云的匹配与比对,计算激光雷达相对运动的距离和姿态的改变,也就完成了对机器人自身的定位。
激光雷达距离测量比较准确,误差模型简单,在强光直射以外的环境中运行稳定,点云的处理也比较容易。同时,点云信息本身包含直接的几何关系,使得机器人的路径规划和导航变得直观。激光SLAM理论研究也相对成熟,落地产品更丰富。
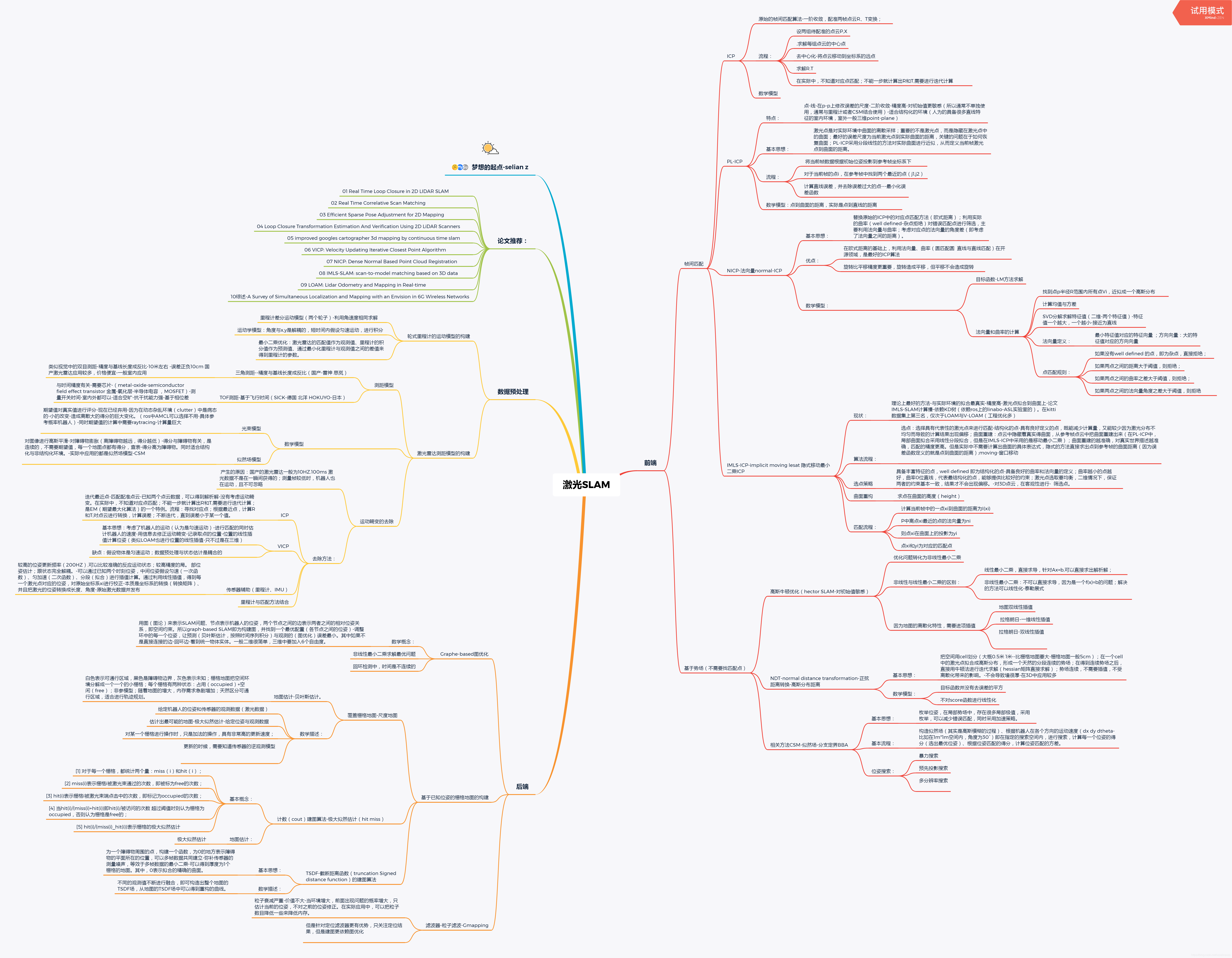
二、激光SLAM(二维)框架整理
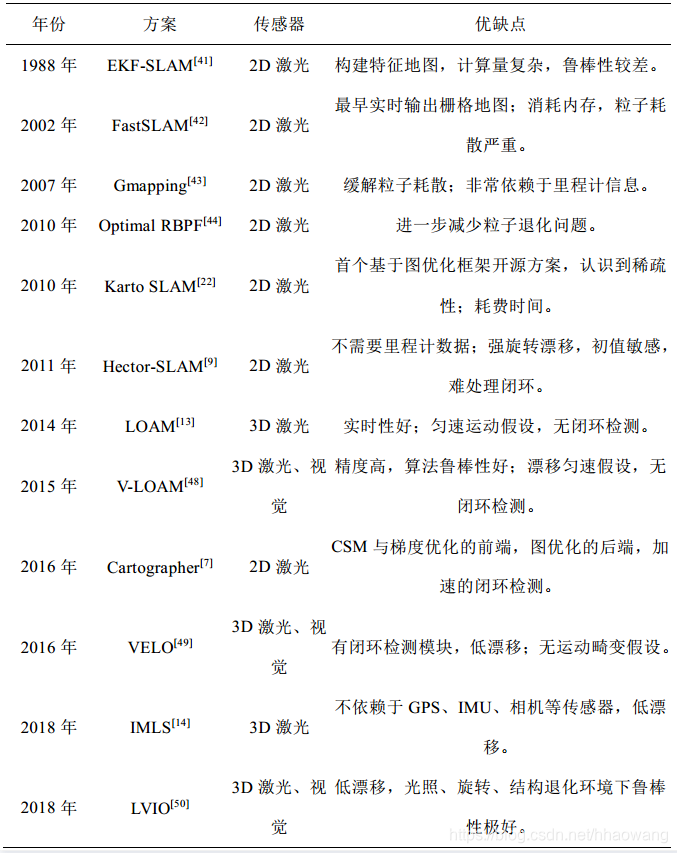
三、开源激光SLAM方案
根据所采用的凸优化框架, 激光 SLAM 可分为两大类:基于滤波器(Filter-based)和基于图优化(Graph-based)的激光 SLAM。
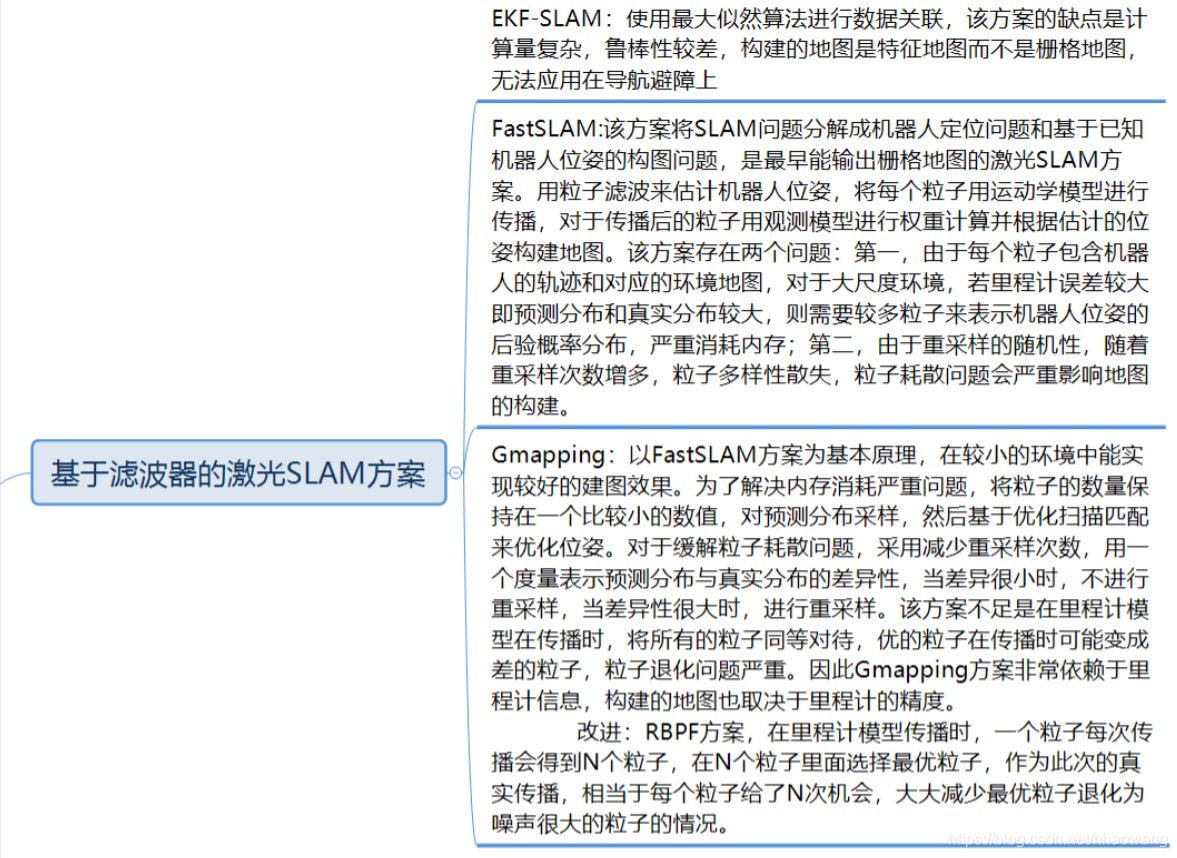
3.1 基于滤波器的激光SLAM方案
3.2 基于图优化激光SLAM方案
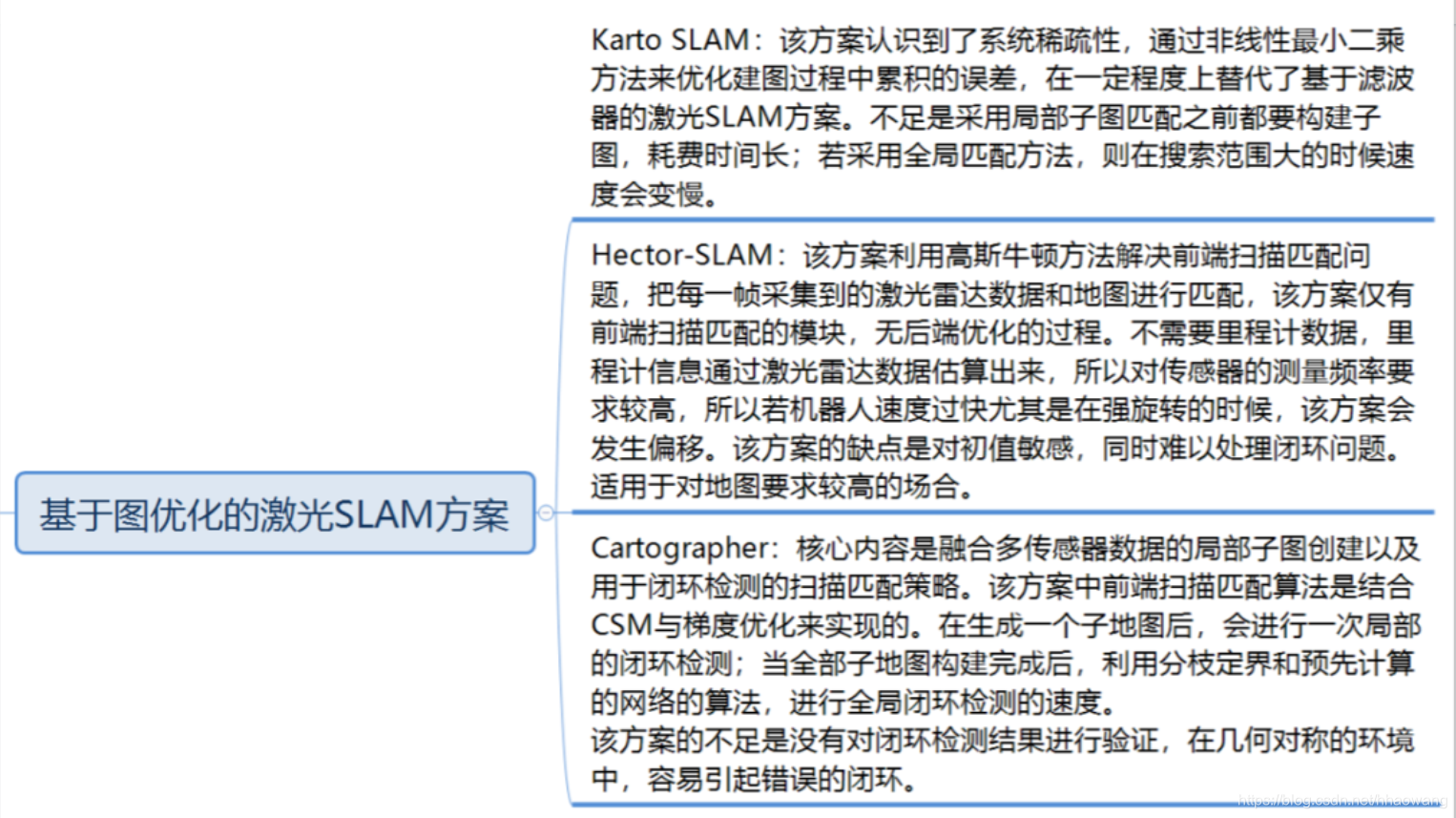
在真实环境中,由于周围特征点能够辅助机器人定位和建图,构建的栅格地图会比仿真环境中效果好。Hector-SLAM 方案的缺点是对初值敏感,同时难以处理闭环问题。 Hector-SLAM 的整体建图精度高于Gmapping,但对参数配置要求较高。Hector -SLAM 适用于对地图要求较高的场合, Gmapping 易用性更好。
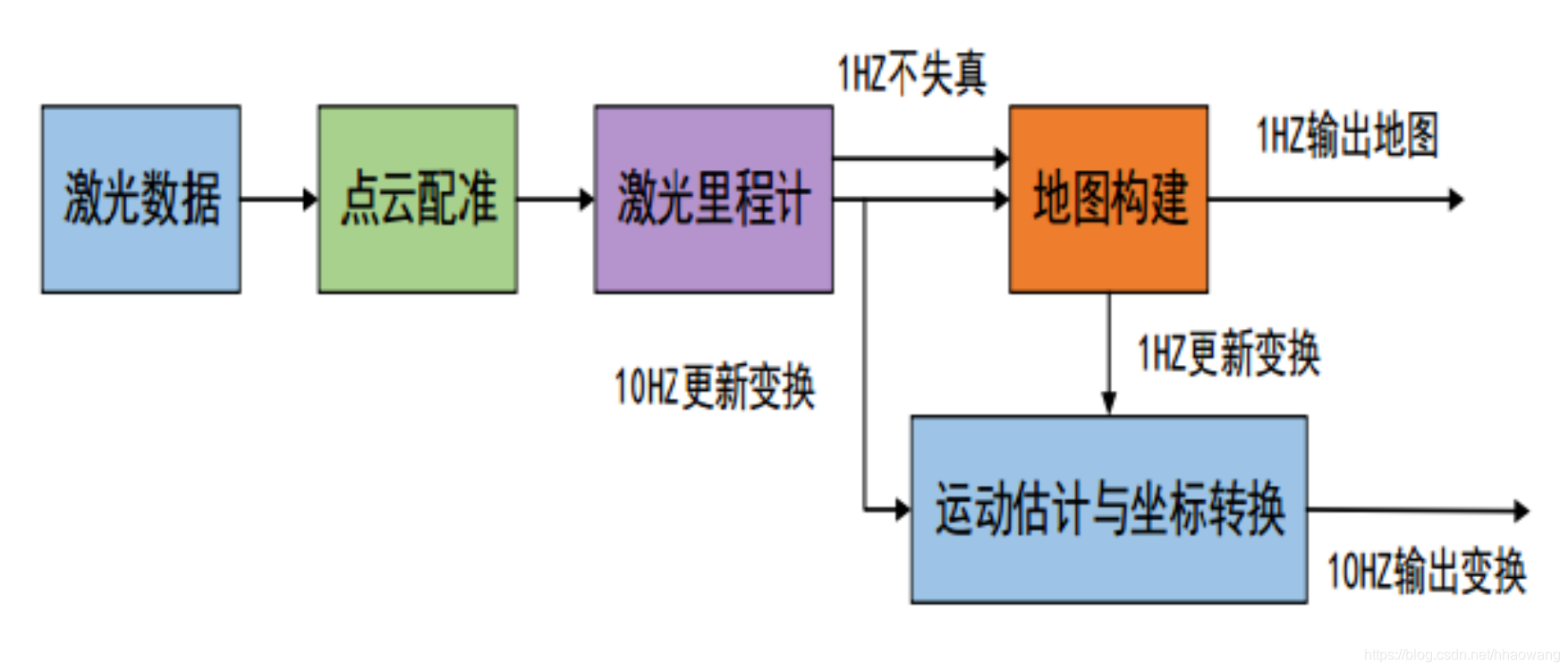
3.3 3D 激光SLAM
在 3D 激光 SLAM 领域中, 由 Zhang J 等人提出的LOAM 方案,利用 3D 激光雷达采集数据, 进行基于特征点的扫描匹配, 利用非线性优化方法进行运动估计, 激光里程计的输出与地图进行匹配, 包括直线匹配和平面匹配, 无回环检测模块,点面特征还不够可靠。
三、小结
Gmapping可以实时构建室内地图,在构建小场景地图所需的计算量较小且精度较高。相比Hector SLAM对激光雷达频率要求低、鲁棒性高(Hector 在机器人快速转向时很容易发生错误匹配,建出的地图发生错位,原因主要是优化算法容易陷入局部最小值);而相比Cartographer在构建小场景地图时,Gmapping不需要太多的粒子并且没有回环检测因此计算量小于Cartographer而精度并没有差太多。Gmapping有效利用了车轮里程计信息,这也是Gmapping对激光雷达频率要求低的原因:里程计可以提供机器人的位姿先验。而Hector和Cartographer的设计初衷不是为了解决平面移动机器人定位和建图,Hector主要用于救灾等地面不平坦的情况,因此无法使用里程计。而Cartographer是用于手持激光雷达完成SLAM过程,也就没有里程计可以用。
随着场景增大所需的粒子增加,因为每个粒子都携带一幅地图,因此在构建大地图时所需内存和计算量都会增加。因此不适合构建大场景地图。并且没有回环检测,因此在回环闭合时可能会造成地图错位,虽然增加粒子数目可以使地图闭合但是以增加计算量和内存为代价。所以不能像Cartographer那样构建大的地图,虽然论文生成几万平米的地图,但实际我们使用中建的地图没有几千平米时就会发生错误。Gmapping和Cartographer一个是基于滤波框架SLAM另一个是基于优化框架的SLAM,两种算法都涉及到时间复杂度和空间复杂度的权衡。Gmapping牺牲空间复杂度保证时间复杂度,这就造成Gmapping不适合构建大场景地图,试想一下你要构建200乘200米的环境地图,栅格分辨率选择5厘米,每个栅格占用一字节内存,那么一个粒子携带的地图就需要16M内存,如果是100个粒子就需要1.6G内存。如果地图变成500乘500米,粒子数为200个,可能电脑就要崩溃了。翻看Cartographer算法,优化相当于地图中只用一个粒子,因此存储空间比较Gmapping会小很多倍,但计算量大,一般的笔记本很难跑出来好的地图,甚至根本就跑不动。优化图需要复杂的矩阵运算,这也是谷歌为什么还有弄个ceres库出来的原因。
文章出处登录后可见!