文章目录
组合导航系统
组合导航的概念
广义
任何两种及以上导航定位手段的组合
◼交汇定位:GNSS、Loran、
◼ 推算导航:INS、里程推算
◼ 匹配定位:地形、视觉、道路、地磁/重力匹配
狭义
至少含有一种推算导航手段
◼ GNSS/INS
◼ GNSS/车载DR
◼ 早期航海、航空
◼ 生物/人类导航
什么是滤波器
1.滤波就是从混合在一起的诸多信号中提取出所需的信号
2.滤波器必须知道待处理(分离)信号的明显特征(如模型)

3.滤波器估计信号s,需要预先知道信号s和噪声n的统计特性
◼ 如果s为低频信号,而n为高频噪声,那么设计相应的低通滤波就可以过滤掉噪声n,分离出信号s
◼ 必须知道信号s的特性
互补滤波
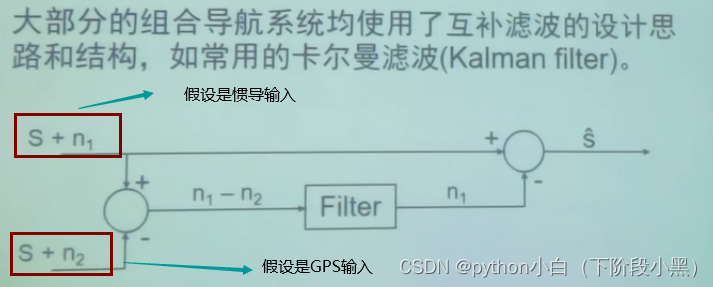
对上述图流程进行解释:
1.现在假设有两种导航定位手段:上面的是惯导的,真实位置s,n1是它的误差,这个定位误差是逐渐累计、逐渐增长、缓慢变大的;下面的是GPS的,也是真实位置加上n2,但是精度水平稳定,不发散。
2.不直接对信号和噪声进行滤波,先把两个信息源求差,真实信号实际上就被减掉了,剩下的就是两个信号源的误差的求差,即n1-n2,然后把这个误差的差异送进去进去滤波
3.n1是低频特性,n2是高频特征;比如采用低通滤波,把惯导的误差放过,GPS的高频误差给杀掉,这样就能估出惯导的误差,就可以补偿惯导输出的误差了
4.互补滤波的精髓:不直接对信号和噪声进行滤波分离,对同一个观测信号S,有两种观测手段,且两种手段的误差特性是差异非常大的,是互补的,因此进行求差,只对两种手段的误差进行分离,把其中一种手段的误差估计出来,然后补偿掉
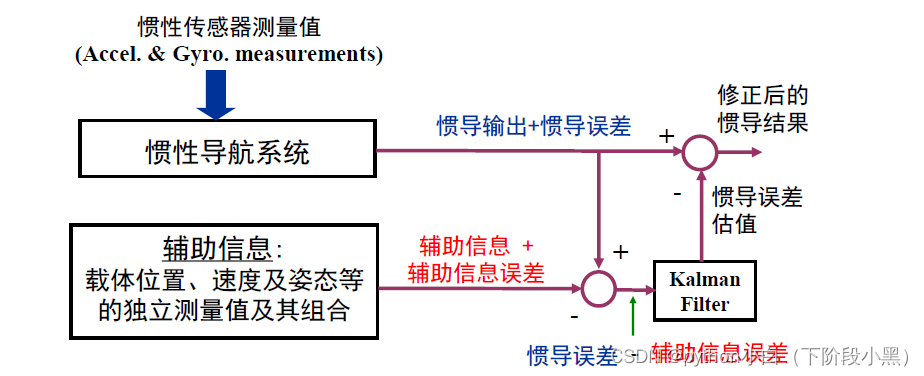
惯性导航中的卡尔曼滤波思想
带有辅助信息的惯性组合导航(Aided INS)中的互补滤波(卡尔曼滤波)思想
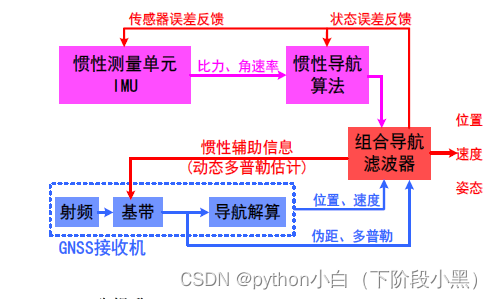
GNSS/INS组合导航分类
根据信息融合深度不同,GNSS和INS组合方式分为:松组合、紧组合和深组合
松组合
概念
基于GNSS导航结果的数据组合
特点
结构简单、性能一般、技术成熟、易实现
紧组合
概念
基于GNSS观测量的数据组合
特点
结构较复杂、质量监测、技术较成熟、较易实现
深组合
概念
基于GNSS信号的组合
特点
调整接收机结构、提高接收机性能、技术不成熟、实现难度高
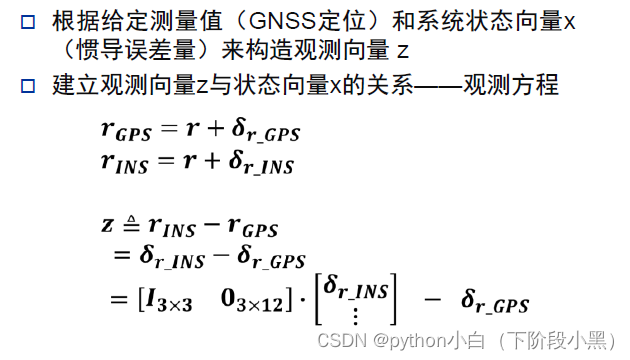
GNSS/INS松组合观测方程(基础版)
GNSS/INS松组合算法
构建系统状态方程
GNSS/INS松组合常采用误差状态卡尔曼滤波(间接卡尔曼滤波)进行数据融合,以解决系统的非线性问题。根据惯导误差微分方程和传感器误差模型,将惯性传感器主要误差参数(加速度计和陀螺的零偏及比例因子误差)增广到卡尔曼滤波的系统状态中,可得卡尔曼滤波的状态向量及连续时间系统状态方程
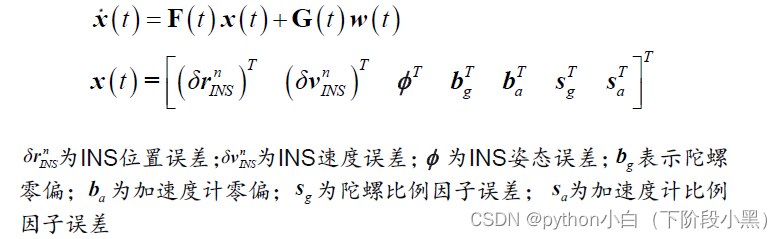
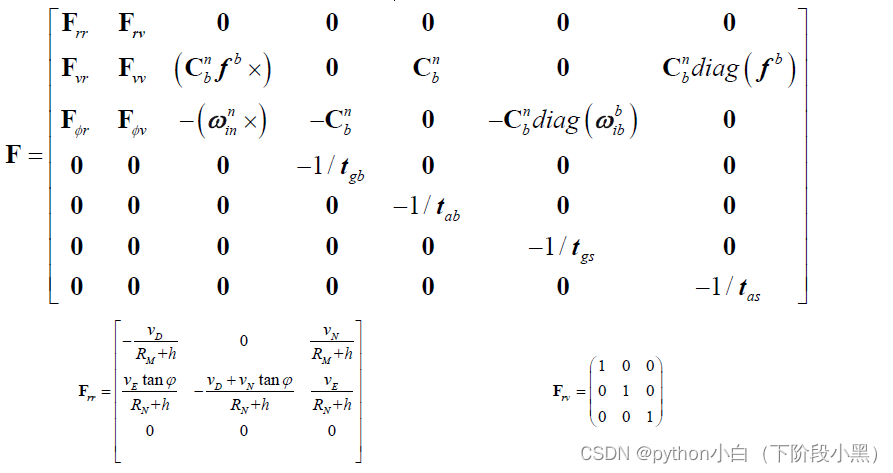
系统动态矩阵– F阵

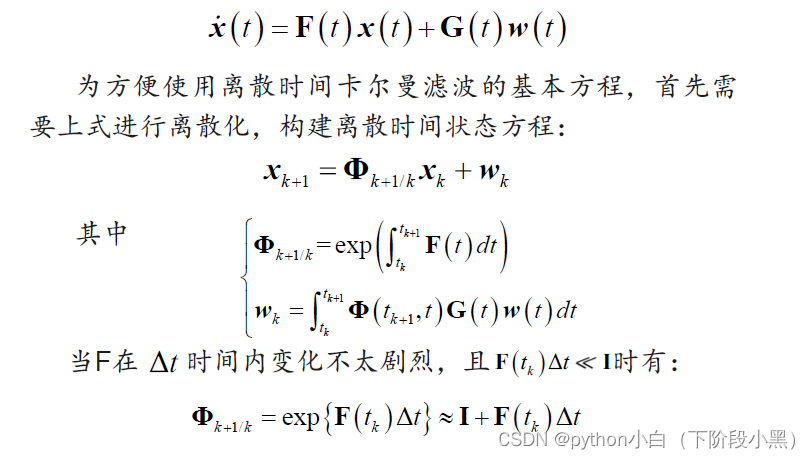
状态方程离散化– 状态转移矩阵
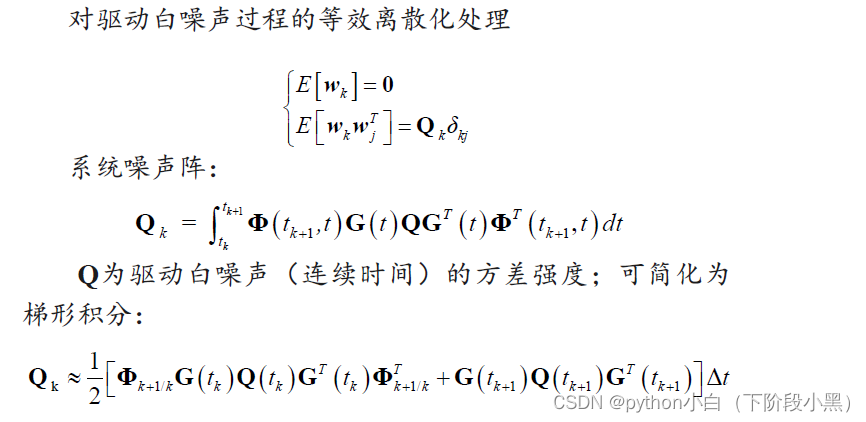
状态方程离散化– 噪声等效离散化
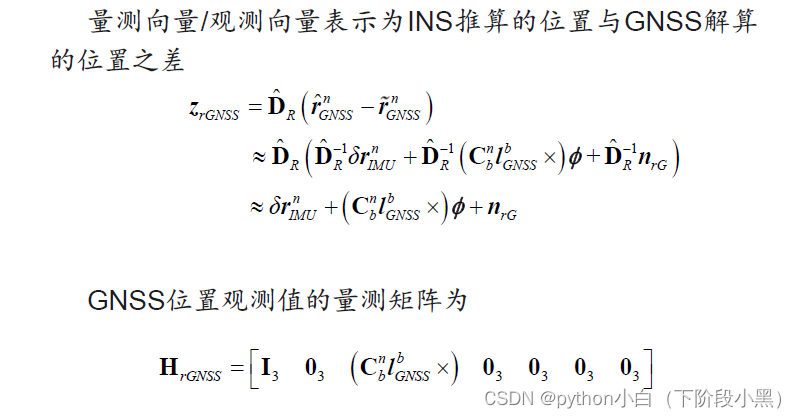
观测方程:GNSS位置更新
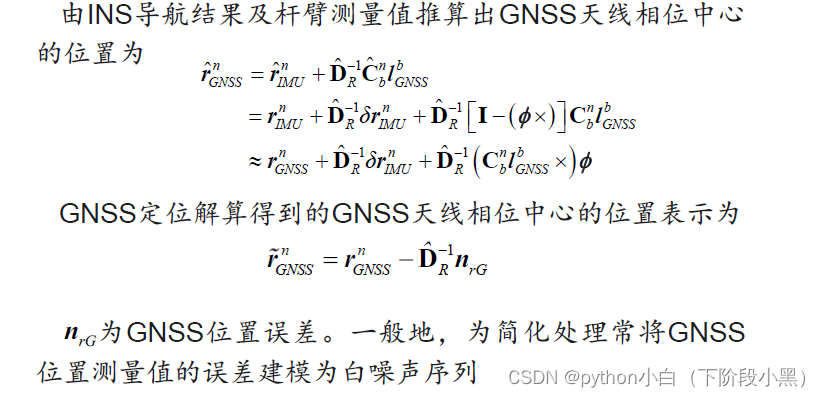
GNSS定位解算给出的是天线相位中心(或其它参考点)的位置坐标,INS机械编排给出的是IMU测量中心的导航结果,二者在物理上不重合,组合导航解算时需进行杆臂效应改正。GNSS天线相位中心与IMU测量中心之间的位置转换关系式为:
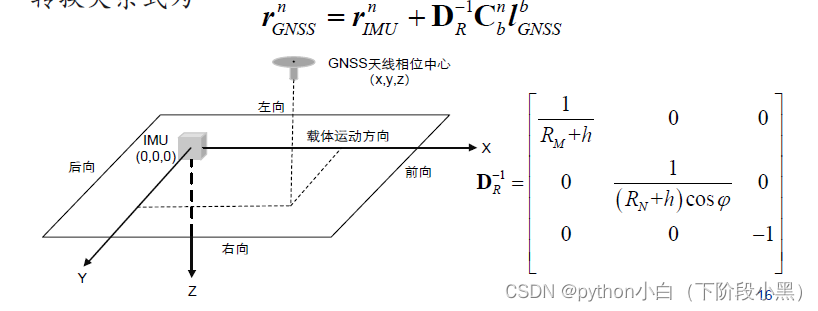
GNSS位置更新
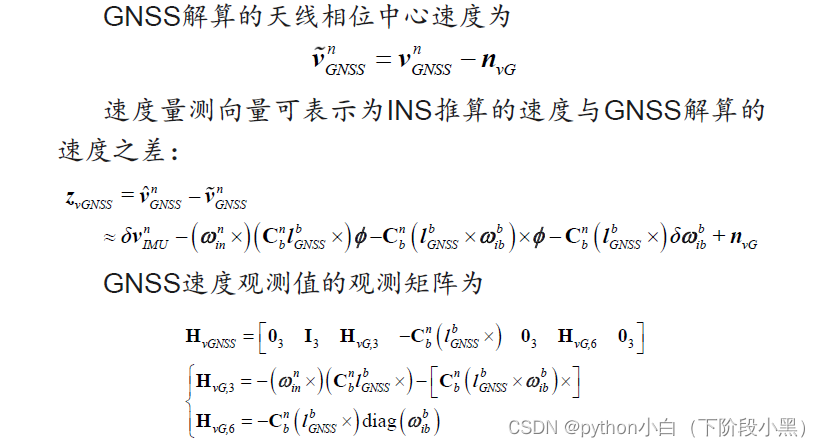
观测方程:GNSS速度更新
GNSS采用多普勒测速可以提供相对独立的三维速度观测值。根据IMU速度推算GNSS天线相位中心速度的理论模型为
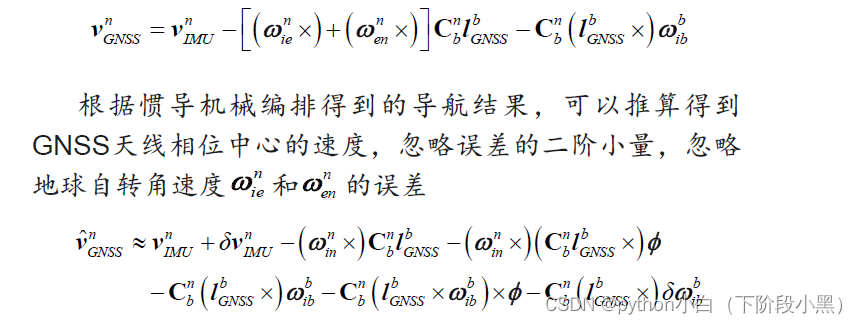
GNSS速度更新
算法实现中的注意事项
◼ 误差状态KF,在进行闭环反馈之后,被反馈的状态量部分应该置零
◼ Q阵的设置
◼ R阵的设置
文章出处登录后可见!