🔥作者:FrigidWinter
🔥简介:主攻机器人与人工智能领域的理论研究和工程应用,业余丰富各种技术栈。主要涉足:【机器人(ROS)】【机器学习】【深度学习】【计算机视觉】
🔥专栏:
- 《机器人原理与技术》
- 计算机视觉教程
- “机器学习”
- “嵌入式系统”
- …
内容
- 1 引例
- 2 牛顿迭代算法求根
- 3 牛顿迭代优化
- 4 代码实战:Logistic回归
1 引例
给定如图所示的某个函数,如何计算函数零
?
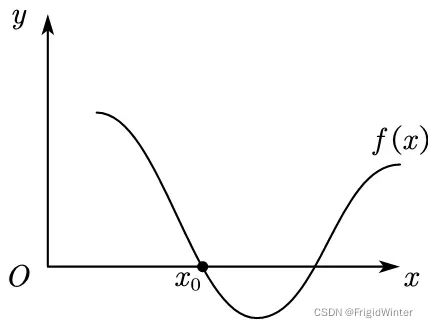
我们如何在数学上解决这个问题?
最简单的方法是解方程,还有代数中著名的零点确定定理
如果函数
在区间
上的图像是一条连续曲线,并且有
,那么函数
内有零点,即至少有一个
,所以
,这个
也是等式
的根。
然而,数学方法不一定适用于工程应用。当函数形式很复杂时,例如超越函数形式;当非解析形式,如递推关系,一般难以进行精确的方程分析,因为代数还没有发展出任意形式的A求根公式。零点确定定理的求解效率也较低,需要不断试错。
因此,今天的话题——牛顿迭代法被引入为工程数值计算服务。
2 牛顿迭代算法求根
轮迭代后,自变量更新为
,目标函数
在
Taylor中展开:
我们希望下一次迭代到根,忽略泰勒余数,让,然后
可以通过不断重复操作来接近根点。
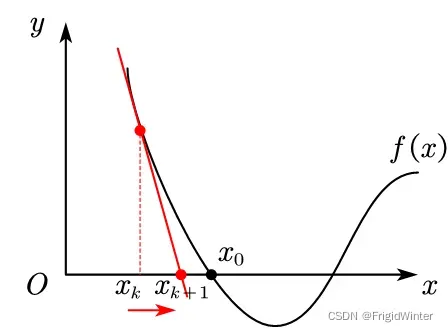
从几何上看,上述过程实际上就是在处做
处的切线,并找到切线的零点,工程上称为局部线性化。如图所示,如果
在
的左边,那么下一个迭代方向就是右边。
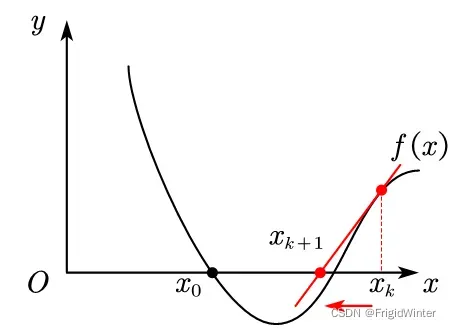
如果在
的右侧,那么下一次迭代的方向是向左。
3 牛顿迭代优化
要将优化问题转化为寻找目标函数一阶导数零点的问题,可以使用上面提到的牛顿迭代法。
具体来说,经过轮的迭代,自变量更新为
,目标函数
在
Taylor中展开:
两边推导
让,这样我们得到
对于向量,将上述迭代公式推广为
其中是Hessian矩阵,当其正定时可以保证牛顿优化算法往 减小的方向迭代
牛顿法的特点如下:
①以二阶速率收敛到最优点,迭代次数远小于梯度下降法,优化速度快;
梯度下降法的解析参考图文详解神秘的梯度下降算法原理(附Python代码)
②学习率为,包含更多关于函数本身的信息,迭代步长可以自动调整,可视为自适应梯度下降算法;
③ 耗费CPU计算资源多,每次迭代需要计算一次Hessian矩阵,且无法保证Hessian矩阵可逆且正定,因而无法保证一定向最优点收敛。
在实际应用中,牛顿迭代法一般不能直接使用,会引入改进来规避其缺陷,称为拟牛顿算法簇,其中包含大量不同的算法变种,例如共轭梯度法、DFP算法等等,今后都会介绍到。
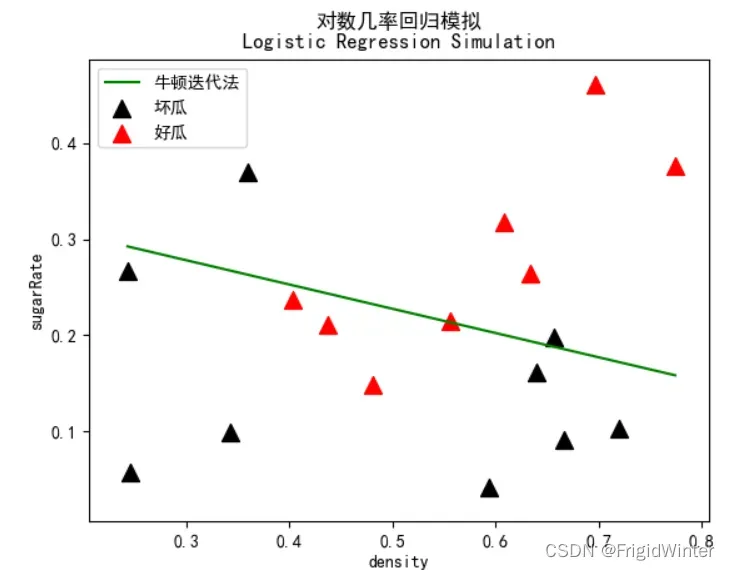
4 代码实战:Logistic回归
import pandas as pd
import numpy as np
import os
import matplotlib.pyplot as plt
import matplotlib as mpl
from Logit import Logit
'''
* @breif: 从CSV中加载指定数据
* @param[in]: file -> 文件名
* @param[in]: colName -> 要加载的列名
* @param[in]: mode -> 加载模式, set: 列名与该列数据组成的字典, df: df类型
* @retval: mode模式下的返回值
'''
def loadCsvData(file, colName, mode='df'):
assert mode in ('set', 'df')
df = pd.read_csv(file, encoding='utf-8-sig', usecols=colName)
if mode == 'df':
return df
if mode == 'set':
res = {}
for col in colName:
res[col] = df[col].values
return res
if __name__ == '__main__':
# ============================
# 读取CSV数据
# ============================
csvPath = os.path.abspath(os.path.join(__file__, "../../data/dataset3.0alpha.csv"))
dataX = loadCsvData(csvPath, ["含糖率", "密度"], 'df')
dataY = loadCsvData(csvPath, ["好瓜"], 'df')
label = np.array([
1 if i == "是" else 0
for i in list(map(lambda s: s.strip(), list(dataY['好瓜'])))
])
# ============================
# 绘制样本点
# ============================
line_x = np.array([np.min(dataX['密度']), np.max(dataX['密度'])])
mpl.rcParams['font.sans-serif'] = [u'SimHei']
plt.title('对数几率回归模拟\nLogistic Regression Simulation')
plt.xlabel('density')
plt.ylabel('sugarRate')
plt.scatter(dataX['密度'][label==0],
dataX['含糖率'][label==0],
marker='^',
color='k',
s=100,
label='坏瓜')
plt.scatter(dataX['密度'][label==1],
dataX['含糖率'][label==1],
marker='^',
color='r',
s=100,
label='好瓜')
# ============================
# 实例化对数几率回归模型
# ============================
logit = Logit(dataX, label)
# 采用牛顿迭代法
logit.logitRegression(logit.newtomMethod)
line_y = -logit.w[0, 0] / logit.w[1, 0] * line_x - logit.w[2, 0] / logit.w[1, 0]
plt.plot(line_x, line_y, 'g-', label="牛顿迭代法")
# 绘图
plt.legend(loc='upper left')
plt.show()
更新权重代码为
'''
* @breif: 牛顿迭代法更新权重
* @param[in]: None
* @retval: 优化参数的增量dw
'''
def newtomMethod(self):
wTx = np.dot(self.w.T, self.X).reshape(-1, 1)
p = Logit.sigmod(wTx)
dw_1 = -self.X.dot(self.y - p)
dw_2 = self.X.dot(np.diag((p * (1 - p)).reshape(self.N))).dot(self.X.T)
dw = np.linalg.inv(dw_2).dot(dw_1)
return dw
版权声明:本文为博主FrigidWinter原创文章,版权归属原作者,如果侵权,请联系我们删除!
原文链接:https://blog.csdn.net/FRIGIDWINTER/article/details/122832980