



内容
- 前言
- 0、导入需要的包和基本配置
- 1、timeout(没用到)
- 2、set_logging、init_seeds
- 2.1、set_logging
- 2.2、init_seeds
- 3、get_latest_run
- 4、is_docker、is_colab、is_pip
- 4.1、is_docker
- 4.2、is_colab
- 4.3、is_pip(没用到)
- 5、file_size(没用到)
- 6、colorstr
- 7、check_online
- 8、emojis
- 9、check_git_status
- 10、check_python、check_requirements
- 10.1、check_python
- 10.2、check_requirements
- 11、make_pisible、check_img_size
- 11.1、make_pisible
- 11.2、check_img_size
- 12、check_imshow
- 13、check_file
- 14、check_dataset
- 15、download(没用到)
- 16、clean_str
- 17、one_cycle
- 18、labels_to_class_weights、labels_to_image_weights
- 18.1、labels_to_class_weights
- 18.2、labels_to_image_weights
- 19、coco80_to_coco91_class
- 20、clip_coords
- 21、scale_coords
- 22、xyxy2xywh、xywh2xyxy
- 22.1、xyxy2xywh
- 22.2、xywh2xyxy
- 23、xywhn2xyxy、xyxy2xywhn、xyn2xy
- 23.1、xywhn2xyxy
- 23.2、xyxy2xywhn
- 23.3、xyn2xy
- 24、non_max_suppression
- 25、strip_optimizer
- 26、print_mutation
- 27、apply_classifier
- 28、increment_path
- 29、save_one_box
- 30、resample_segments
- 31、segment2box
- 32、segments2boxes
- 总结
前言
源码:YOLOv5源码.
导航:【YOLOV5-5.x 源码讲解】整体项目文件导航.
注释版全部项目文件已上传至GitHub:yolov5-5.x-annotations.
这个文件是yolov5的通用工具类,写了一些通用的工具函数,用的很广,整个项目哪里都可能用到。这个文件的函数非常多,代码量也很大(上千行了),也都比较重要,希望大家看的时候多点耐心,都能掌握!
0、导入需要的包和基本配置
import contextlib # python上下文管理器 执行with…as…的时候调用contextlib
import glob # 仅支持部分通配符的文件搜索模块
import logging # 日志模块
import math # 数学公式模块
import os # 与操作系统进行交互的模块
import platform # 提供获取操作系统相关信息的模块
import random # 生成随机数的模块
import re # 用来匹配字符串(动态、模糊)的模块
import signal # 信号处理模块
import time # 时间模块 更底层
import urllib # 用于操作网页URL, 并对网页的内容进行抓取处理 如urllib.parse: 解析url
from itertools import repeat # 循环器模块 创建一个迭代器,重复生成object
from multiprocessing.pool import ThreadPool # 多线程模块 线程池
from pathlib import Path # Path将str转换为Path对象 使字符串路径易于操作的模块
from subprocess import check_output # 创建一个子进程再命令行执行..., 最后返回执行结果(文件)
import cv2 # opencv库
import numpy as np # numpy矩阵处理函数库
import pandas as pd # pandas矩阵操作模块
import pkg_resources as pkg # 用于查找, 自省, 激活和使用已安装的Python发行版
import torch # pytorch框架
import torchvision # 为pytorch 提供一些辅助工具
import yaml # yaml配置文件读写模块
from utils.google_utils import gsutil_getsize
from utils.metrics import box_iou, fitness
from utils.torch_utils import init_torch_seeds
# 设置运行相关的一些基本的配置 Settings
# 控制print打印torch.tensor格式设置 tensor精度为5(小数点后5位) 每行字符数为320个 显示方法为long
torch.set_printoptions(linewidth=320, precision=5, profile='long')
# 控制print打印np.array格式设置 精度为5 每行字符数为320个 format short g, %precision=5
np.set_printoptions(linewidth=320, formatter={'float_kind': '{:11.5g}'.format})
# pandas的最大显示行数是10
pd.options.display.max_columns = 10
# 阻止opencv参与多线程(与 Pytorch的 Dataloader不兼容)
cv2.setNumThreads(0)
# 确定最大的线程数 这里被限制在了8
os.environ['NUMEXPR_MAX_THREADS'] = str(min(os.cpu_count(), 8)) # NumExpr max threads
1、timeout(没用到)
这个函数是自定义的timeout超时函数,如果某个程序执行超时,就会触发超时处理函数_timeout_handler 返回超时异常信息。但是这个函数没用到,代码中都是使用库函数自己定义的timeout,没用用这个自定义的timeout函数。所以这个函数可以了解下就行,不过这种超时提示的代码还是有必要学习的。
timeout函数代码:
class timeout(contextlib.ContextDecorator):
"""没用到 代码中都是使用库函数自己定义的timeout 没用用这个自定义的timeout函数
设置一个超时函数 如果某个程序执行超时 就会触发超时处理函数_timeout_handler 返回超时异常信息
并没有用到 这里面的timeout都是用python库函数实现的 并不需要自己另外写一个
使用: with timeout(seconds): sleep(10) 或者 @timeout(seconds) decorator
dealing with wandb login-options timeout issues as well as check_github() timeout issues
"""
def __init__(self, seconds, *, timeout_msg='', suppress_timeout_errors=True):
self.seconds = int(seconds) # 限制时间
self.timeout_message = timeout_msg # 报错信息
self.suppress = bool(suppress_timeout_errors)
def _timeout_handler(self, signum, frame):
# 超时处理函数 一旦超时 就在seconds后发送超时信息
raise TimeoutError(self.timeout_message)
def __enter__(self):
# signal.signal: 设置信号处理的函数_timeout_handler
# 执行流进入with中会执行__enter__方法 如果发生超时, 就会触发超时处理函数_timeout_handler 返回超时异常信息
signal.signal(signal.SIGALRM, self._timeout_handler) # Set handler for SIGALRM
# signal.alarm: 设置发送SIGALRM信号的定时器
signal.alarm(self.seconds) # start countdown for SIGALRM to be raised
def __exit__(self, exc_type, exc_val, exc_tb):
# 执行流离开 with 块时(没有发生超时), 则调用这个上下文管理器的__exit__方法来清理所使用的资源
signal.alarm(0) # Cancel SIGALRM if it's scheduled
if self.suppress and exc_type is TimeoutError: # Suppress TimeoutError
return True
2、set_logging、init_seeds
这两个函数是一些初始化操作。set_logging是对日志的设置(format、level)等进行初始化,init_seeds是进行一系列的随机数种子。
2.1、set_logging
该函数是初始化日志的格式、级别等。
def set_logging(rank=-1, verbose=True):
"""广泛使用在train.py、test.py、detect.py等文件的main函数的第一步
对日志的设置(format、level)等进行初始化
"""
logging.basicConfig(
# 设置日志输出的格式和内容 只打印日志信息
format="%(message)s",
# 设置日志级别 rank不为-1或0时设置输出级别level为WARN 为-1或0时设置级别为INFO
level=logging.INFO if (verbose and rank in [-1, 0]) else logging.WARN)
广泛使用在train.py、test.py、detect.py等文件的main函数的第一步:
2.2、init_seeds
这个函数是使用random.random()、np.random.rand()、init_torch_seeds(调用torch_utils.py中的函数)等生成一系列的随机数种子,以保证结果的可复现性。
init_seeds函数代码:
def init_seeds(seed=0):
"""在train函数的一开始调用
用于设置一系列的随机数种子
"""
# 设置随机数 针对使用random.random()生成随机数的时候相同
random.seed(seed)
# 设置随机数 针对使用np.random.rand()生成随机数的时候相同
np.random.seed(seed)
# 为CPU设置种子用于生成随机数的时候相同 并确定训练模式
init_torch_seeds(seed)
这个函数在train函数的一开始调用:

3、get_latest_run
这个函数的作用是查找最近保存的权重文件 last*.pt,用以进行断点续训。
get_latest_run函数代码:
def get_latest_run(search_dir='.'):
"""用在train.py查找最近的pt文件进行断点续训
用于返回该项目中最近的模型 'last.pt'对应的路径
:params search_dir: 要搜索的文件的根目录 默认是 '.' 表示搜索该项目中的文件
"""
# 从Python版本3.5开始, glob模块支持该"**"指令(仅当传递recursive标志时才会解析该指令)
# glob.glob函数匹配所有的符合条件的文件, 并将其以list的形式返回
last_list = glob.glob(f'{search_dir}/**/last*.pt', recursive=True)
# os.path.getctime 返回路径对应文件的创建时间
# 所以这里是返回路径列表中创建时间最晚(最近的last文件)的路径
return max(last_list, key=os.path.getctime) if last_list else ''
函数在train.py中被调用:

4、is_docker、is_colab、is_pip
下面是三个检测函数,is_docker检测当前环境是否是docker环境,is_colab检查当前环境是否是Google Colab环境,is_pip检测当前文件是否在pip package(site-packages)文件里。前面两个函数在后面的函数都会用到,但是is_pip是没用到的。
4.1、is_docker
这个函数是查询当前环境是否是docker环境,会用到后面的check_git_status和check_imshow等函数中。
is_docker函数代码:
def is_docker():
"""在后面的check_git_status和check_imshow等函数中被调用
查询当前环境是否是docker环境 Is environment a Docker container?
"""
return Path('/workspace').exists() # or Path('/.dockerenv').exists()
4.2、is_colab
这个函数是检查当前环境是否是Google Colab环境,会用到后面的check_imshow函数中。
is_colab函数代码:
def is_colab():
"""用到后面的check_imshow函数中
检查当前环境是否是Google Colab环境 Is environment a Google Colab instance?
"""
try:
import google.colab
return True
except Exception as e:
return False
4.3、is_pip(没用到)
这个函数是检测当前文件是否在pip package(site-packages)文件里,不过这个函数没用到。
is_pip函数代码:
def is_pip():
"""没用到
当前文件是否在pip package(site-packages)文件里
Is file in a pip package?
"""
return 'site-packages' in Path(__file__).absolute().parts
5、file_size(没用到)
这个函数是返回本地文件的大小,功能和之前google_utils.py中的gsutil_getsize函数(返回网站链接对应文件的大小)很像。不过这个函数并没有用到哦,随便看看就好。
file_size函数代码:
def file_size(file):
"""没用到
返回本地文件的大小(MB)
:params file: 要查询的文件地址
"""
# .stat(): 返回文件相关状态 st_size: 返回文件的大小
return Path(file).stat().st_size / 1e6
6、colorstr
该功能是为输出的开头和结尾添加颜色,使命令行输出显示更美观。
colorstr函数代码:
def colorstr(*input):
"""用到下面的check_git_status、check_requirements等函数 train.py、test.py、detect.py等文件中
把输出的开头和结尾加上颜色 命令行输出显示会更加好看 如: colorstr('blue', 'hello world')
Colors a string https://en.wikipedia.org/wiki/ANSI_escape_code
"""
# 如果输入长度为1, 就是没有选择颜色 则选择默认颜色设置 blue + bold
# args: 输入的颜色序列 string: 输入的字符串
*args, string = input if len(input) > 1 else ('blue', 'bold', input[0])
# 定义一些基础的颜色 和 字体设置
colors = {'black': '\033[30m', # basic colors
'red': '\033[31m',
'green': '\033[32m',
'yellow': '\033[33m',
'blue': '\033[34m',
'magenta': '\033[35m',
'cyan': '\033[36m',
'white': '\033[37m',
'bright_black': '\033[90m', # bright colors
'bright_red': '\033[91m',
'bright_green': '\033[92m',
'bright_yellow': '\033[93m',
'bright_blue': '\033[94m',
'bright_magenta': '\033[95m',
'bright_cyan': '\033[96m',
'bright_white': '\033[97m',
'end': '\033[0m', # misc
'bold': '\033[1m',
'underline': '\033[4m'}
# 把输出的开头和结尾加上颜色 命令行输出显示会更加好看
return ''.join(colors[x] for x in args) + f'{string}' + colors['end']
这个函数会用到下面的check_git_status、check_requirements等函数中,而且还会广泛用在train.py、test.py、detect.py等其他文件中如:




函数效果如下(可以看到输出的开头和结尾的变量使用了其他颜色):

7、check_online
这个函数是检查当前主机是否联网了。会在下面的check_git_status、check_requirements等函数中使用。
check_online函数代码:
def check_online():
"""在下面的check_git_status、check_requirements等函数中使用
检查当前主机网络连接是否可用
"""
import socket # 导入socket模块 可解决基于tcp和ucp协议的网络传输
try:
# 连接到一个ip 地址addr("1.1.1.1")的TCP服务上, 端口号port=443 timeout=5 时限5秒 并返回一个新的套接字对象
socket.create_connection(("1.1.1.1", 443), 5) # check host accessibility
# 没发现什么异常, 连接成功, 有网, 就返回True
return True
except OSError:
# 连接异常, 没网, 返回False
return False
8、emojis
这个函数是忽略掉字符串中无法用ascii编码的内容(比如表情、图像),返回Windows系统可以安全、完整显示的字符串。会在下面的check_git_status、check_requirements等函数中使用。
emojis函数代码:
def emojis(str=''):
"""在下面的check_git_status、check_requirements等函数中使用
返回Windows系统可以安全、完整显示的字符串
Return platform-dependent emoji-safe version of string
"""
# 通过.encode().decode()的组合忽略掉无法用ascii编码的内容(比如表情、图像)
return str.encode().decode('ascii', 'ignore') if platform.system() == 'Windows' else str
9、check_git_status
这个函数是检查当前的代码版本是否是最新的。如果不是最新的,会提示使用git pull命令进行升级。
功能代码:
def check_git_status(err_msg=', for updates see https://github.com/ultralytics/yolov5'):
"""用在train.py的main函数的一开始部分
检查当前代码版本是否是最新的 如果不是最新的 会提示使用git pull命令进行升级
"""
# 彩色显示github单词 github:
print(colorstr('github: '), end='')
try:
# 检查电脑有没有安装git仓库 没有安装直接报异常并输出异常信息
assert Path('.git').exists(), 'skipping check (not a git repository)'
# 检查电脑系统有没有安装docker环境变量 没有直接报异常并输出异常信息
assert not is_docker(), 'skipping check (Docker image)'
# 检查主机是否联网
assert check_online(), 'skipping check (offline)'
# 创建cmd命令
cmd = 'git fetch && git config --get remote.origin.url'
# 并创建子进程进行执行cmd命令 返回执行结果 时限5秒
url = check_output(cmd, shell=True, timeout=5).decode().strip().rstrip('.git') # git fetch
branch = check_output('git rev-parse --abbrev-ref HEAD', shell=True).decode().strip() # checked out
n = int(check_output(f'git rev-list {branch}..origin/master --count', shell=True)) # commits behind
# n>0 说明当前版本之后还有commit 因此当前版本不是最新的 s为输出的相关提示
if n > 0:
# 如果不是最新 提升字符s: WARNING...
s = f"⚠️ WARNING: code is out of date by {n} commit{'s' * (n > 1)}. " \
f"Use 'git pull' to update or 'git clone {url}' to download latest."
else:
# 已经是最新
s = f'up to date with {url} ✅'
# 输出显示信息(最新/不是最新) emojis: 忽略掉Windows电脑无法用ascii编码的字符
print(emojis(s)) # emoji-safe
except Exception as e:
# 只要报任何异常 直接输出异常信息
print(f'{e}{err_msg}')
这个函数只用在train.py的main函数的一开始部分:

10、check_python、check_requirements
check_python是检查当前的版本号是否满足最小版本号minimum,check_requirements是检查已经安装的包是否满足requirements对应txt文件的要求。check_requirements会调用check_python。
10.1、check_python
这个函数是检查当前的版本号是否满足最小版本号minimum。会在下面的check_requirements函数被调用。
check_python函数代码:
def check_python(minimum='3.6.2', required=True):
"""用在下面的函数check_requirements中
检查当前的版本号是否满足最小版本号minimum
Check current python version vs. required python version
"""
# cuurent: 当前使用的python版本号 如3.8.10
current = platform.python_version()
# 对比当前版本号和输出的至少的版本号(python版本一般是向下兼容的)
# 如果满足返回result=True 反正返回result=False
# pkg.parse_version(版本号)用于对比两个版本号的大小
result = pkg.parse_version(current) >= pkg.parse_version(minimum)
if required:
# 检查版本号满不满足最小版本号minimum
assert result, f'Python {minimum} required by YOLOv5, but Python {current} is currently installed'
return result
10.2、check_requirements
这个函数用于检查已经安装的包是否满足requirements对应txt文件的要求。会调用colorstr、check_python、check_online等函数。
check_requirements函数代码:
def check_requirements(requirements='requirements.txt', exclude=()):
"""用在train.py、test.py、detect.py等文件
用于检查已经安装的包是否满足requirements对应txt文件的要求
Check installed dependencies meet requirements (pass *.txt file or list of packages)
"""
# 红色显示requirements单词 requirements:
prefix = colorstr('red', 'bold', 'requirements:')
# 检查当前的python版本符不符合最低版本要求 check python version
check_python()
# 解析requirements.txt中的所有包 解析成list 里面存放着一个个的pkg_resources.Requirement类
# 如: ['matplotlib>=3.2.2', 'numpy>=1.18.5', ……]
if isinstance(requirements, (str, Path)): # requirements.txt file
# 将str字符串requirements转换成路径requirements
file = Path(requirements)
if not file.exists(): # requirements.txt文件不存在
print(f"{prefix} {file.resolve()} not found, check failed.")
return
# pkg_resources.parse_requirements:可以解析file中的每一条要求
# 每一行转换为pkg_resources.Requirement类并进行进一步处理
# 处理形式为调用每一行对应的name和specifier属性。前者代表需要包的名称,后者代表版本
# 返回list 每个元素是requirements.txt的一行 如: ['matplotlib>=3.2.2', 'numpy>=1.18.5', ……]
requirements = [f'{x.name}{x.specifier}' for x in pkg.parse_requirements(file.open()) if x.name not in exclude]
else: # list or tuple of packages
requirements = [x for x in requirements if x not in exclude]
n = 0 # 统计下面程序更新包的个数 number of packages updates
# 依次检查环境中安装的包(及每个包对应的依赖包)是否满足requirements中的每一个最低要求安装包
for r in requirements:
try:
# pkg_resources.require(file) 返回对应包所需的所有依赖包 当这些包有哪个未安装或者版本不对的时候就会报错
pkg.require(r)
except Exception as e:
# 没有找到当前包r 或者 当前包r的版本低于最低要求
# 首先打印信息
print(f"{prefix} {r} not found and is required by YOLOv5, attempting auto-update...")
try:
# 再检查当前主机是否联网
assert check_online(), f"'pip install {r}' skipped (offline)"
# 最后创建一个子进程再执行pip指令并返回执行结果
print(check_output(f"pip install '{r}'", shell=True).decode())
n += 1 # 更新包的数量加1
except Exception as e:
print(f'{prefix} {e}')
if n:
# if packages updated 打印一写更新信息
source = file.resolve() if 'file' in locals() else requirements
s = f"{prefix} {n} package{'s' * (n > 1)} updated per {source}\n" \
f"{prefix} ⚠️ {colorstr('bold', 'Restart runtime or rerun command for updates to take effect')}\n"
print(emojis(s)) # emoji-safe
用在train.py中:
test.py:


11、make_pisible、check_img_size
这两个函数主要是用来约束图像的长款或者feature map的长款,必须是pisor(等于算法的最大下采样率一般是32)的最小倍数。
11.1、make_pisible
这个函数用来取大于等于x且是pisor的最小倍数,保证输入的x(一般是长宽)是算法的最大下采样率的倍数。
def make_pisible(x, pisor):
"""用在下面的make_pisible函数中 yolo.py的parse_model函数和commom.py的AutoShape函数中
取大于等于x且是pisor的最小倍数
Returns x evenly pisible by pisor
"""
# math.ceil 向上取整
return math.ceil(x / pisor) * pisor
这个函数用在下面的make_pisible函数中及 yolo.py的parse_model函数和commom.py的AutoShape函数中:

11.2、check_img_size
这个函数是为了保证img_size是能被s(32)整除,如果不能就返回大于等于img_size且是s的最小倍数。这个函数本质是通过调用make_pisible函数实现的。
check_img_size函数代码:
def check_img_size(img_size, s=32):
"""这个函数主要用于train.py中和detect.py中 用来检查图片的长宽是否符合规定
检查img_size是否能被s整除,这里默认s为32 返回大于等于img_size且是s的最小倍数
Verify img_size is a multiple of stride s
"""
# 取大于等于x的最小值且该值能被pisor整除
new_size = make_pisible(img_size, int(s)) # ceil gs-multiple
if new_size != img_size:
print('WARNING: --img-size %g must be multiple of max stride %g, updating to %g' % (img_size, s, new_size))
return new_size
用来保证img的长宽符合规定,一般用在train.py中:
或者detect.py中:


12、check_imshow
这个函数是检查一下前环境是否可以使用opencv.imshow显示图片。
def check_imshow():
"""用在detect.py中 使用webcam的时候调用
检查当前环境是否可以使用opencv.imshow显示图片
主要有两点限制: Docker环境 + Google Colab环境
"""
# Check if environment supports image displays
try:
# 检查当前环境是否是一个Docker环境 cv2.imshow()不能再docker环境中使用
assert not is_docker(), 'cv2.imshow() is disabled in Docker environments'
# 检查当前环境是否是一个Google Colab环境 cv2.imshow()不能在Google Colab环境中使用
assert not is_colab(), 'cv2.imshow() is disabled in Google Colab environments'
# 初始化一张图片检查下opencv是否可用
cv2.imshow('test', np.zeros((1, 1, 3)))
cv2.waitKey(1)
cv2.destroyAllWindows()
cv2.waitKey(1)
return True
except Exception as e:
print(f'WARNING: Environment does not support cv2.imshow() or PIL Image.show() image displays\n{e}')
return False
会在detect.py中使用webcam的时候调用: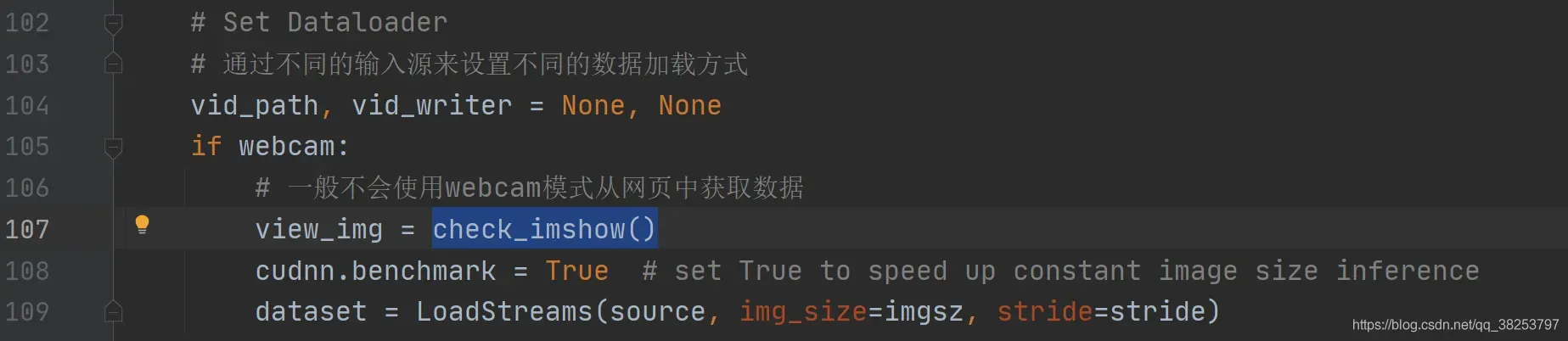

13、check_file
该功能是检查在奔度的相关文件路径中是否可以找到该文件。如果没有找到,则说明文件丢失,返回空;如果传入网络地址,则直接下载文件;否则,它将返回第一个匹配的本地匹配项。文件名。这个功能非常好用并且被广泛使用。
check_file函数代码:
def check_file(file):
"""用在train.py和test.py文件中 检查本地有没有这个文件
检查相关文件路径能否找到文件 并返回文件名
Search/download file (if necessary) and return path
"""
file = str(file) # convert to str()
# 如果传进来的是文件或者是’‘, 直接返回文件名str
if Path(file).is_file() or file == '': # exists
return file
# 如果传进来的以 'http:/' 或者 'https:/' 开头的url地址, 就下载
elif file.startswith(('http:/', 'https:/')): # download
url = str(Path(file)).replace(':/', '://') # Pathlib turns :// -> :/
# urllib.parse: 解析url .unquote: 对url进行解码 file: 要下载的文件名
# '%2F' to '/', split https://url.com/file.txt?auth
file = Path(urllib.parse.unquote(file)).name.split('?')[0]
print(f'Downloading {url} to {file}...')
# 使用torch.hub.download_url_to_file从url地址上中下载文件名为file的文件
torch.hub.download_url_to_file(url, file)
# 检查是否下载成功
assert Path(file).exists() and Path(file).stat().st_size > 0, f'File download failed: {url}' # check
# 返回下载的文件名
return file
else:
# 否则, 传进来的就是当前项目下的一个全局路径 查找匹配的文件名 返回第一个
# glob.glob: 匹配当前项目下的所有项目 返回所有符合条件的文件files
files = glob.glob('./**/' + file, recursive=True) # find file
assert len(files), f'File not found: {file}' # assert file was found
assert len(files) == 1, f"Multiple files match '{file}', specify exact path: {files}" # assert unique
# 返回第一个匹配到的文件名
return files[0] # return file
在train.py中使用(检查本地data、cfg、hyp等文件是否存在):
在test.py中使用(检查本地data文件是否存在):


14、check_dataset
这个函数是检查本地是否有指定的数据集,没用就从torch库中下载并解压数据集。
check_dataset函数代码:
def check_dataset(data, autodownload=True):
"""用在train.py和detect.py中 检查本地有没有数据集
检查数据集 如果本地没有则从torch库中下载并解压数据集
:params data: 是一个解析过的data_dict len=7
例如: ['path'='../datasets/coco128', 'train','val', 'test', 'nc', 'names', 'download']
:params autodownload: 如果本地没有数据集是否需要直接从torch库中下载数据集 默认True
"""
# path: WindowPath '..\datasets\coco128'
path = Path(data.get('path', '')) # optional 'path' field
# 如果path不为空 就更新(扩展)train、val和test的路径
# train: data['train'] -> path / data['train']
# 'images/train2017' -> '..\\datasets\\coco128\\images\\train2017'
# val: data['val'] -> path / data['val']
# 'images/train2017' -> '..\\datasets\\coco128\\images\\train2017'
if path:
for k in 'train', 'val', 'test': #
if data.get(k): # prepend path
data[k] = str(path / data[k]) if isinstance(data[k], str) else [str(path / x) for x in data[k]]
# train: 训练路径 '..\\datasets\\coco128\\images\\train2017'
# val: 验证路径 '..\\datasets\\coco128\\images\\train2017'
# test: 测试路径 None
# s: 下载地址 'https://github.com/ultralytics/yolov5/releases/download/v1.0/coco128.zip'
train, val, test, s = [data.get(x) for x in ('train', 'val', 'test', 'download')]
if val:
# path.resolve() 该方法将一些的 路径/路径段 解析为绝对路径
# val: [WindowsPath('E:/yolo_v5/datasets/coco128/images/train2017')]
val = [Path(x).resolve() for x in (val if isinstance(val, list) else [val])] # val path
# 如果val不存在 说明本地不存在数据集
if not all(x.exists() for x in val):
print('\nWARNING: Dataset not found, nonexistent paths: %s' % [str(x) for x in val if not x.exists()])
# 如果下载地址s和下载标记(flag)autodownload不为空, 就直接下载
if s and autodownload: # download script
# 如果下载地址s是http开头就从url中下载数据集
if s.startswith('http') and s.endswith('.zip'):
# f: 得到下载文件的文件名 filename
f = Path(s).name
print(f'Downloading {s} ...')
# 开始下载 利用torch.hub.download_url_to_file函数从s路径中下载文件名为f的文件
torch.hub.download_url_to_file(s, f)
root = path.parent if 'path' in data else '..' # unzip directory i.e. '../'
Path(root).mkdir(parents=True, exist_ok=True) # create root
# 执行解压命名 将文件f解压到root地址 解压后文件名为f
r = os.system(f'unzip -q {f} -d {root} && rm {f}') # unzip
# 如果下载地址s是bash开头就使用bash指令下载数据集
elif s.startswith('bash '): # bash script
print(f'Running {s} ...')
# 使用bash命令下载
r = os.system(s)
# 否则下载地址就是一个python脚本 执行python脚本下载数据集
else: # python script
r = exec(s, {'yaml': data}) # return None
print('Dataset autodownload %s\n' % ('success' if r in (0, None) else 'failure')) # print result
else:
# 下载地址为空 或者不需要下载 标记(flag)autodownload
raise Exception('Dataset not found.')
使用在train.py中:

15、download(没用到)
这个函数是将url中的文件下载下来,再解压。但是这个文件并没有在程序中被调用,一般要下载东西都是调用torch.hub.download_url_to_file系统函数和google_utils.py中的attempt_download函数进行下载文件。所以,这个函数随便看看就好。
def download(url, dir='.', unzip=True, delete=True, curl=False, threads=1):
"""没用到
Multi-threaded file download and unzip function
:params url: 下载文件的url地址
:params dir: 下载下来文件保存的目录
:params unzip: 下载后文件是否需要解压
:params delete: 解压后原文件(未解压)是否需要删除
:params curl: 是否使用cmd curl语句下载文件 False就使用torch.hub下载
:params threads: 下载一个文件需要的线程数
"""
def download_one(url, dir):
"""
Download 1 file
:params url: 文件下载地址 Path(url).name=文件名
:params dir: 文件保存的目录
"""
f = dir / Path(url).name # filename
# 这个目录下不存在这个文件 就直接下载
if not f.exists():
print(f'Downloading {url} to {f}...')
if curl: # 使用cmd命令curl下载
os.system(f"curl -L '{url}' -o '{f}' --retry 9 -C -") # curl download, retry and resume on fail
else: # 使用torch.hub下载
torch.hub.download_url_to_file(url, f, progress=True) # torch download
# 如果需要解压 且下载的文件后缀是 '.zip' 或 '.gz'
if unzip and f.suffix in ('.zip', '.gz'):
print(f'Unzipping {f}...')
if f.suffix == '.zip':
s = f'unzip -qo {f} -d {dir}' # unzip -quiet -overwrite
elif f.suffix == '.gz':
s = f'tar xfz {f} --directory {f.parent}' # unzip
# 解压后是否需要删除未解压的文件
if delete: # delete zip file after unzip
s += f' && rm {f}'
os.system(s) # 调用cmd执行s命令
dir = Path(dir)
dir.mkdir(parents=True, exist_ok=True) # make directory
if threads > 1: # 使用线程池
# 定义了一个线程池, 最多创建threads个线程
pool = ThreadPool(threads)
# 进程池中的该方法会将 iterable 参数传入的可迭代对象分成 chunksize 份传递给不同的进程来处理。
pool.imap(lambda x: download_one(*x), zip(url, repeat(dir))) # multi-threaded
pool.close()
pool.join()
else:
for u in tuple(url) if isinstance(url, str) else url:
download_one(u, dir)
16、clean_str
此函数将字符串中的一些奇怪符号“|@#!¡·$€%&()=?¿^*;:,¨´><+”替换为下划线“_”。
clean_str函数代码:
def clean_str(s):
"""在datasets.py中的LoadStreams类中被调用
字符串s里在pattern中字符替换为下划线_ 注意pattern中[]不能省
Cleans a string by replacing special characters with underscore _
"""
# re: 用来匹配字符串(动态、模糊)的模块 正则表达式模块
# pattern: 表示正则中的模式字符串 repl: 就是replacement的字符串 string: 要被处理, 要被替换的那个string字符串
# 所以这句话执行的是将字符串s里在pattern中的字符串替换为 "_"
return re.sub(pattern="[|@#!¡·$€%&()=?¿^*;:,¨´><+]", repl="_", string=s)
只用在datasets.py中的LoadStreams类中:


17、one_cycle
这个函数是一种特殊的学习率衰减策略。来自这篇论文:one_cycle. 感兴趣的朋友可以读一读。
def one_cycle(y1=0.0, y2=1.0, steps=100):
"""用在train.py的学习率衰减策略模块
one_cycle lr lr先增加, 再减少, 再以更小的斜率减少
论文: https://arxiv.org/pdf/1803.09820.pdf
"""
# lambda function for sinusoidal ramp from y1 to y2
return lambda x: ((1 - math.cos(x * math.pi / steps)) / 2) * (y2 - y1) + y1
在train.py的学习率衰减策略模块中使用: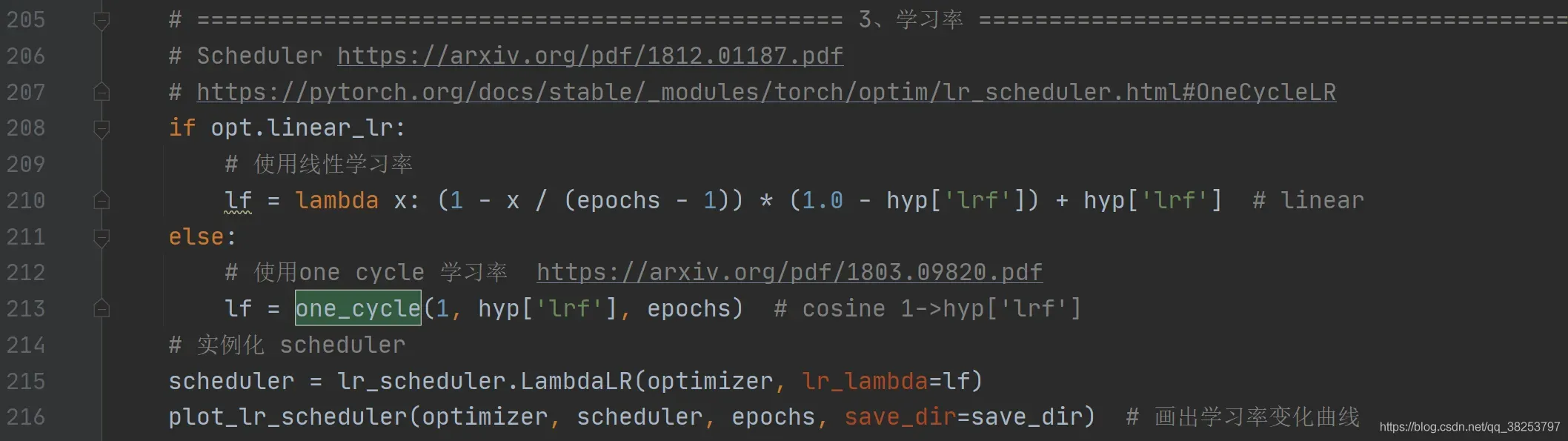
如果是linear_lr的lr变化效果: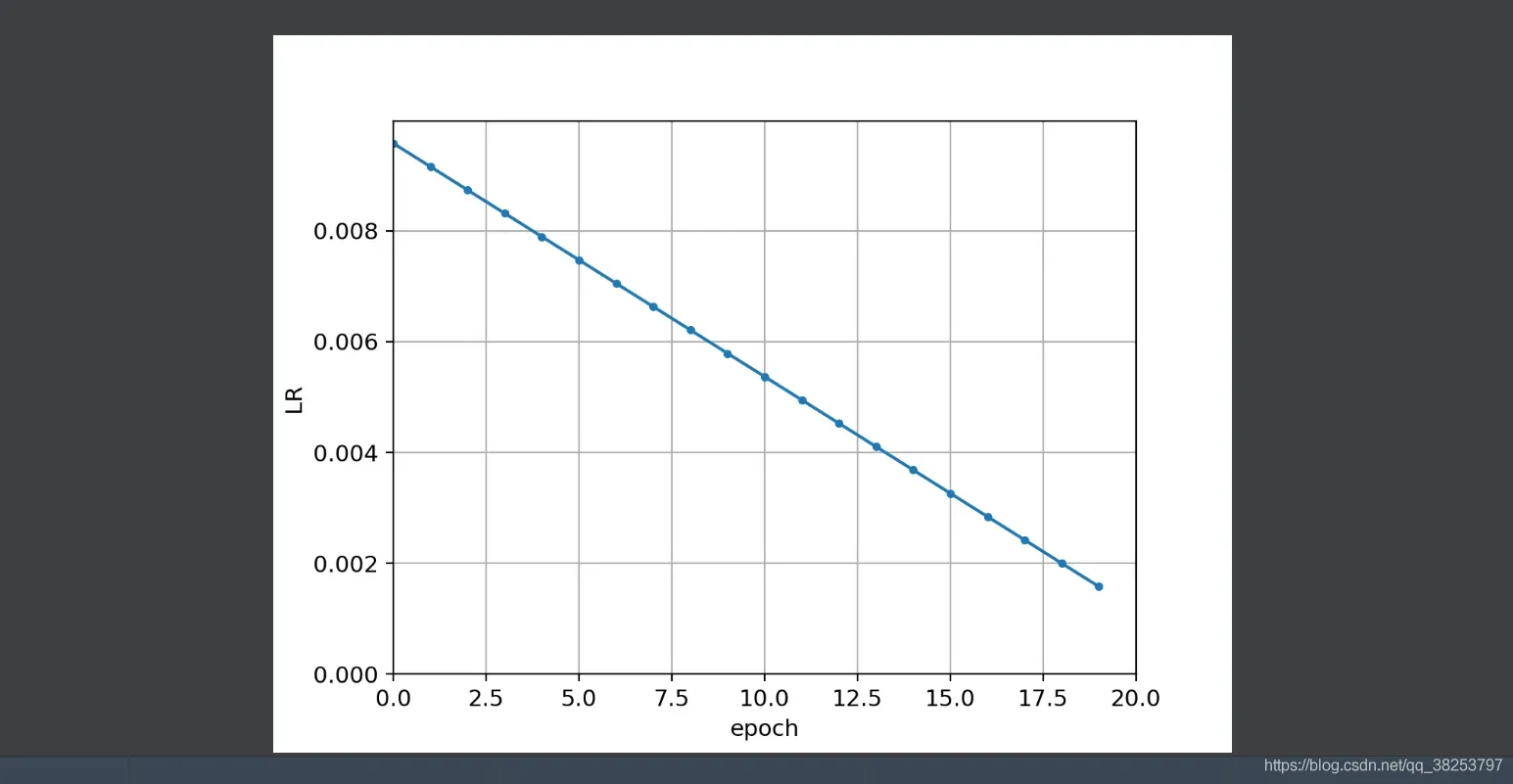


如果是one_cycle的lr变化效果: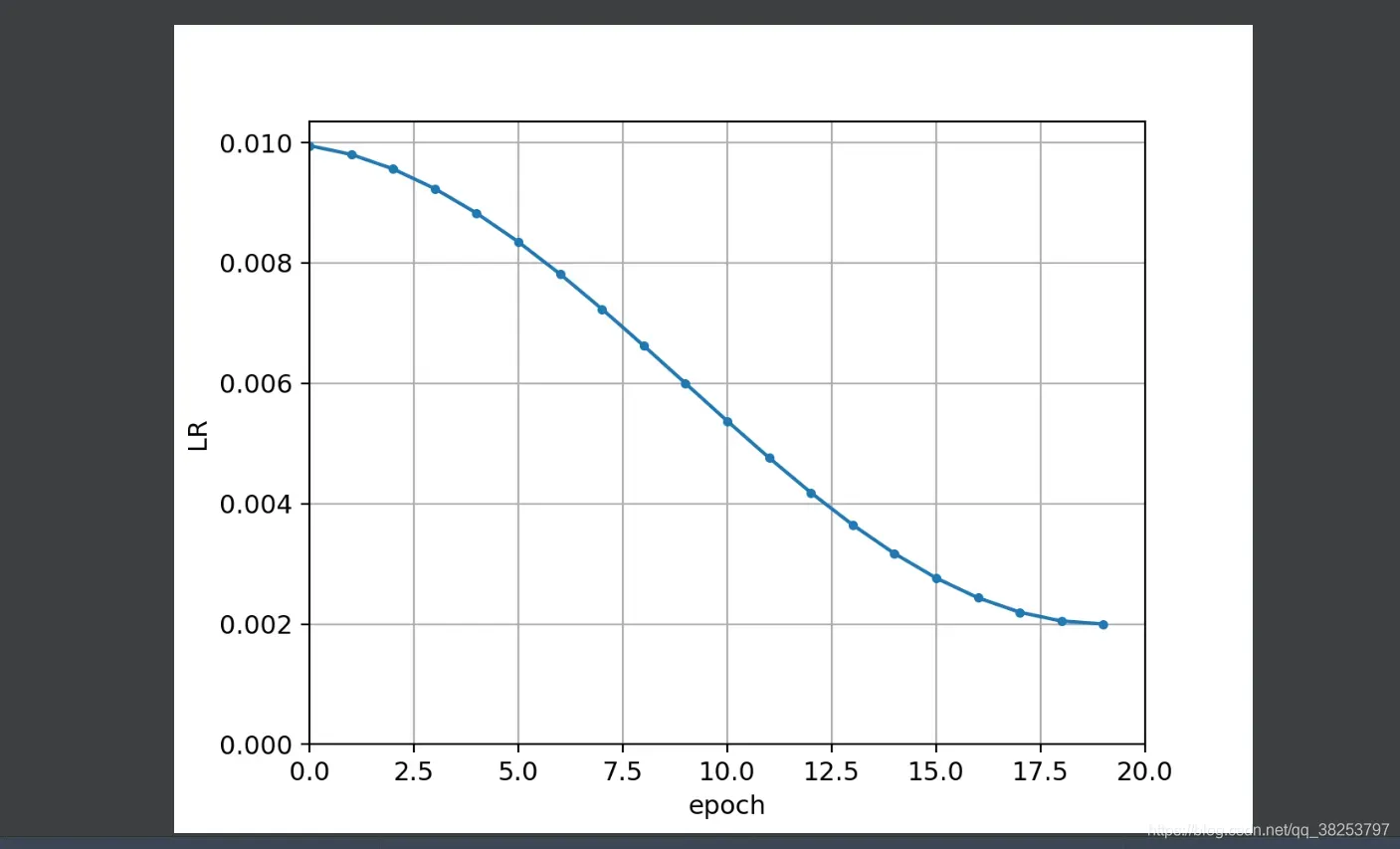
一般使用one_cycle的效果会比较好。

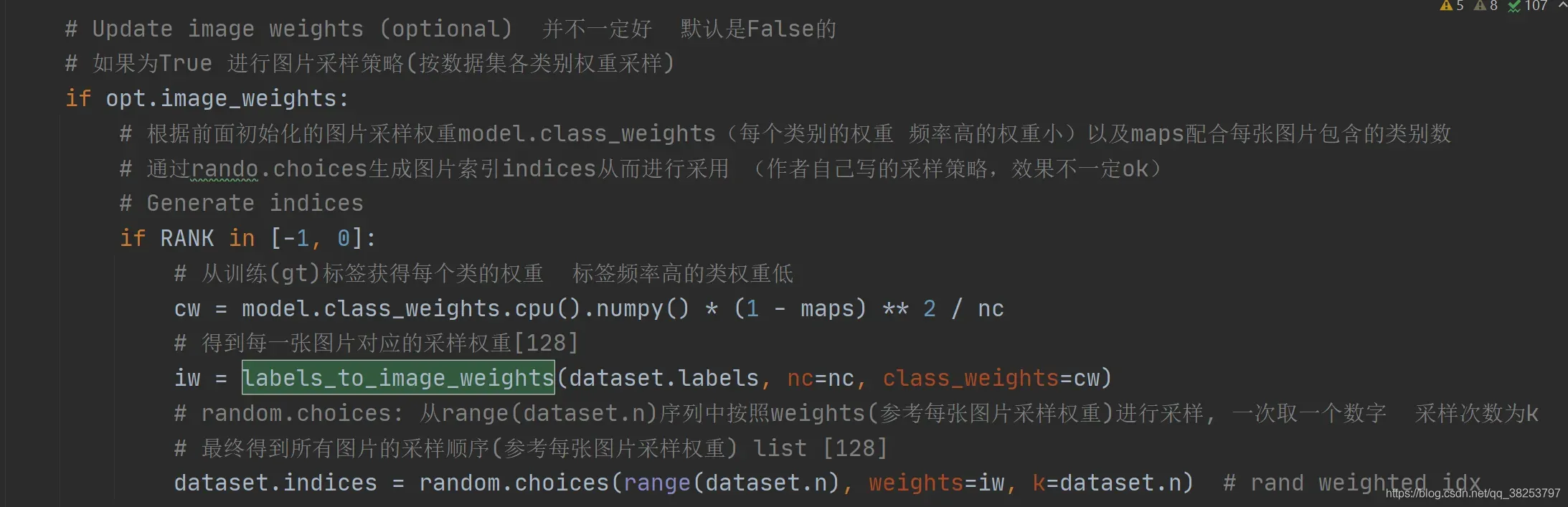
18、labels_to_class_weights、labels_to_image_weights
这两个函数是联合使用的。最终的目的是为了在数据集中采样的时候,不使用随机采样,而是使用更加科学的按图片权重进行采样。第一个函数labels_to_class_weights是为了得到数据集中所有类别的权重(频率大的权重小)。第二个函数labels_to_image_weights是利用labels_to_class_weights函数得到的类别权重得到每张图片对应的一个权重。然后利用每张图片的权重在当前batch进行采样,这样的采样方式会更加科学点。
两个函数都只在train.py中使用,且是同时使用的如图:



18.1、labels_to_class_weights
这个函数是从训练(gt)标签获得每个类的权重 ,标签频率高的类权重低。
labels_to_class_weights函数代码:
def labels_to_class_weights(labels, nc=80):
"""用在train.py中 得到每个类别的权重 标签频率高的类权重低
从训练(gt)标签获得每个类的权重 标签频率高的类权重低
Get class weights (inverse frequency) from training labels
:params labels: gt框的所有真实标签labels
:params nc: 数据集的类别数
:return torch.from_numpy(weights): 每一个类别根据labels得到的占比(次数越多权重越小) tensor
"""
if labels[0] is None: # no labels loaded
return torch.Tensor()
labels = np.concatenate(labels, 0) # labels.shape = (866643, 5) for COCO
# classes: 所有标签对应的类别labels labels[:, 0]: 类别 .astype(np.int): 取整
classes = labels[:, 0].astype(np.int) # labels = [labels_num, class+xywh]
# weight: 返回每个类别出现的次数 [1, nc]
weights = np.bincount(classes, minlength=nc) # occurrences per class
# Prepend gridpoint count (for uCE training)
# gpi = ((320 / 32 * np.array([1, 2, 4])) ** 2 * 3).sum() # gridpoints per image
# weights = np.hstack([gpi * len(labels) - weights.sum() * 9, weights * 9]) ** 0.5 # prepend gridpoints to start
# 将出现次数为0的类别权重全部取1 replace empty bins with 1
weights[weights == 0] = 1
# 其他所有的类别的权重全部取次数的倒数 number of targets per class
weights = 1 / weights
# normalize 求出每一类别的占比
weights /= weights.sum()
return torch.from_numpy(weights) # numpy -> tensor
18.2、labels_to_image_weights
这个函数是利用每张图片真实gt框的真实标签labels和上一步labels_to_class_weights得到的每个类别的权重得到数据集中每张图片对应的权重。
labels_to_image_weights函数代码:
def labels_to_image_weights(labels, nc=80, class_weights=np.ones(80)):
"""用在train.py中 利用上面得到的每个类别的权重得到每一张图片的权重 再对图片进行按权重进行采样
通过每张图片真实gt框的真实标签labels和上一步labels_to_class_weights得到的每个类别的权重进行采样
Produces image weights based on class_weights and image contents
:params labels: 每张图片真实gt框的真实标签
:params nc: 数据集的类别数 默认80
:params class_weights: [80] 上一步labels_to_class_weights得到的每个类别的权重
"""
# class_counts: 每个类别出现的次数 [num_labels, nc] 每一行是当前这张图片每个类别出现的次数 num_labels=图片数量=label数量
class_counts = np.array([np.bincount(x[:, 0].astype(np.int), minlength=nc) for x in labels])
# [80] -> [1, 80]
# 整个数据集的每个类别权重[1, 80] * 每张图片的每个类别出现的次数[num_labels, 80] = 得到每一张图片每个类对应的权重[128, 80]
# 另外注意: 这里不是矩阵相乘, 是元素相乘 [1, 80] 和每一行图片的每个类别出现的次数 [1, 80] 分别按元素相乘
# 再sum(1): 按行相加 得到最终image_weights: 得到每一张图片对应的采样权重[128]
image_weights = (class_weights.reshape(1, nc) * class_counts).sum(1)
# index = random.choices(range(n), weights=image_weights, k=1) # weight image sample
return image_weights
19、coco80_to_coco91_class
这个函数是将80个类的coco索引换成91类的coco索引。
coco80_to_coco91_class函数代码:
def coco80_to_coco91_class():
"""用在test.py中 从80类映射到91类的coco索引 取得对应的class id
将80个类的coco索引换成91类的coco索引
:return x: 为80类的每一类在91类中的位置
"""
# converts 80-index (val2014) to 91-index (paper)
# https://tech.amikelive.com/node-718/what-object-categories-labels-are-in-coco-dataset/
# a = np.loadtxt('data/coco.names', dtype='str', delimiter='\n')
# b = np.loadtxt('data/coco_paper.names', dtype='str', delimiter='\n')
# x1 = [list(a[i] == b).index(True) + 1 for i in range(80)] # darknet to coco
# x2 = [list(b[i] == a).index(True) if any(b[i] == a) else None for i in range(91)] # coco to darknet
x = [1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 27, 28, 31, 32, 33, 34,
35, 36, 37, 38, 39, 40, 41, 42, 43, 44, 46, 47, 48, 49, 50, 51, 52, 53, 54, 55, 56, 57, 58, 59, 60, 61, 62, 63,
64, 65, 67, 70, 72, 73, 74, 75, 76, 77, 78, 79, 80, 81, 82, 84, 85, 86, 87, 88, 89, 90]
return x
在test.py中定义:
在test.py中调用(从80类映射到91类的coco索引 取得对应的class id):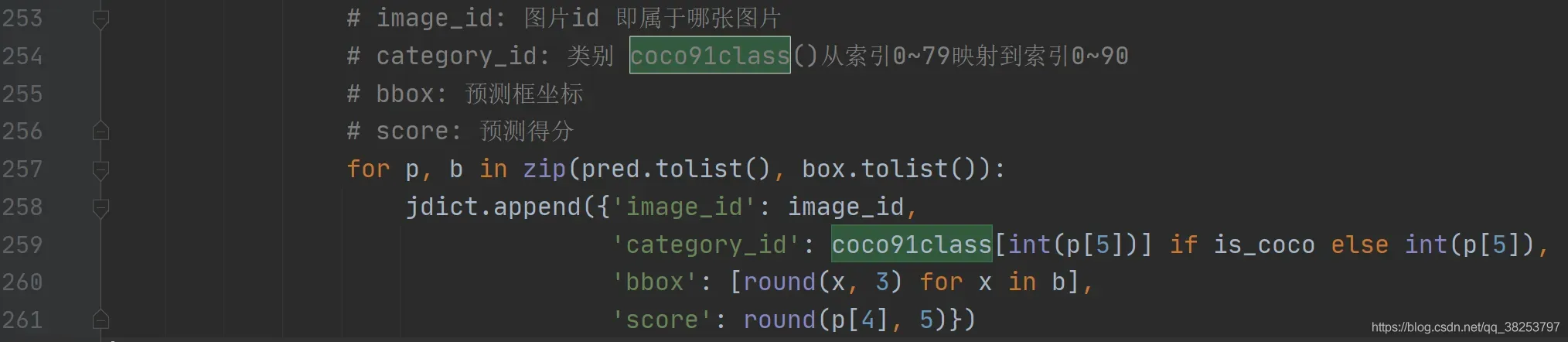


注意: 从这里开始的几个函数都会涉及一些坐标轴xy的操作,记住 x的正坐标是向右,y的正坐标是向下。
20、clip_coords
这个函数的作用是:将boxes的坐标(x1y1x2y2 左上角右下角)限定在图像的尺寸(img_shape hw)内,防止出界。这个函数会用在下面的xyxy2xywhn、save_one_boxd等函数中,很重要,必须掌握。
clip_coords函数代码:
def clip_coords(boxes, img_shape):
"""用在下面的xyxy2xywhn、save_one_boxd等函数中
将boxes的坐标(x1y1x2y2 左上角右下角)限定在图像的尺寸(img_shape hw)内
Clip bounding x1y1x2y2 bounding boxes to image shape (height, width)
"""
if isinstance(boxes, torch.Tensor):
# .clamp_(min, max): 将取整限定在(min, max)之间, 超出这个范围自动划到边界上
boxes[:, 0].clamp_(0, img_shape[1]) # x1
boxes[:, 1].clamp_(0, img_shape[0]) # y1
boxes[:, 2].clamp_(0, img_shape[1]) # x2
boxes[:, 3].clamp_(0, img_shape[0]) # y2
else: # np.array
boxes[:, 0].clip(0, img_shape[1], out=boxes[:, 0]) # x1
boxes[:, 1].clip(0, img_shape[0], out=boxes[:, 1]) # y1
boxes[:, 2].clip(0, img_shape[1], out=boxes[:, 2]) # x2
boxes[:, 3].clip(0, img_shape[0], out=boxes[:, 3]) # y2
21、scale_coords
这个函数是将坐标coords(x1y1x2y2)从img1_shape尺寸缩放到img0_shape尺寸。x的正坐标是向右,y的正坐标是向下。这个函数也是很重要的。
scale_coords函数代码:
def scale_coords(img1_shape, coords, img0_shape, ratio_pad=None):
"""用在detect.py和test.py中 将预测坐标从feature map映射回原图
将坐标coords(x1y1x2y2)从img1_shape缩放到img0_shape尺寸
Rescale coords (xyxy) from img1_shape to img0_shape
:params img1_shape: coords相对于的shape大小
:params coords: 要进行缩放的box坐标信息 x1y1x2y2 左上角 + 右下角
:params img0_shape: 要将coords缩放到相对的目标shape大小
:params ratio_pad: 缩放比例gain和pad值 None就先计算gain和pad值再pad+scale 不为空就直接pad+scale
"""
# ratio_pad为空就先算放缩比例gain和pad值 calculate from img0_shape
if ratio_pad is None:
# gain = old / new 取高宽缩放比例中较小的,之后还可以再pad 如果直接取大的, 裁剪就可能减去目标
gain = min(img1_shape[0] / img0_shape[0], img1_shape[1] / img0_shape[1])
# wh padding wh中有一个为0 主要是pad另一个
pad = (img1_shape[1] - img0_shape[1] * gain) / 2, (img1_shape[0] - img0_shape[0] * gain) / 2
else:
gain = ratio_pad[0][0] # 指定比例
pad = ratio_pad[1] # 指定pad值
# 因为pad = img1_shape - img0_shape 所以要把尺寸从img1 -> img0 就同样也需要减去pad
# 如果img1_shape>img0_shape pad>0 coords从大尺寸缩放到小尺寸 减去pad 符合
# 如果img1_shape<img0_shape pad<0 coords从小尺寸缩放到大尺寸 减去pad 符合
coords[:, [0, 2]] -= pad[0] # x padding
coords[:, [1, 3]] -= pad[1] # y padding
# 缩放scale
coords[:, :4] /= gain
# 防止放缩后的坐标过界 边界处直接剪切
clip_coords(coords, img0_shape)
return coords
用在detect.py中将预测坐标映射回原图:
用在test.py中也是将预测坐标映射回原图:


22、xyxy2xywh、xywh2xyxy
这两个函数是两个相反的过程。xyxy2xywh是将预测信息xyxy格式转化为xywh的格式,而xywh2xyxy是将预测信息xywh格式转化为xyxy的格式。这两个函数的代码很重要,一定要掌握。代码还是那句话:x的正坐标是向右,y的正坐标是向下。
22.1、xyxy2xywh
这个函数是将预测信息xyxy格式转化为xywh的格式。
xyxy2xywh函数代码:
def xyxy2xywh(x):
""""用在detect.py和test.py中 操作最后, 将预测信息从xyxy格式转为xywh格式 再保存
Convert nx4 boxes from [x1, y1, x2, y2] to [x, y, w, h] where x1y1=top-left, x2y2=bottom-right
:params x: [n, x1y1x2y2] (x1, y1): 左上角 (x2, y2): 右下角
:return y: [n, xywh] (x, y): 中心点 wh: 宽高
"""
y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
y[:, 0] = (x[:, 0] + x[:, 2]) / 2 # x center
y[:, 1] = (x[:, 1] + x[:, 3]) / 2 # y center
y[:, 2] = x[:, 2] - x[:, 0] # width
y[:, 3] = x[:, 3] - x[:, 1] # height
return y
在detect.py中使用:

22.2、xywh2xyxy
这个函数是将预测信息xywh格式转化为xyxy的格式。
xywh2xyxy函数代码:
def xywh2xyxy(x):
"""用在test.py中 操作之前 转为xyxy才可以进行操作
注意: x的正方向为右面 y的正方向为下面
Convert nx4 boxes from [x, y, w, h] to [x1, y1, x2, y2] where x1y1=top-left, x2y2=bottom-right
:params x: [n, xywh] (x, y):
:return y: [n, x1y1x2y2] (x1, y1): 左上角 (x2, y2): 右下角
"""
y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
y[:, 0] = x[:, 0] - x[:, 2] / 2 # top left x
y[:, 1] = x[:, 1] - x[:, 3] / 2 # top left y
y[:, 2] = x[:, 0] + x[:, 2] / 2 # bottom right x
y[:, 3] = x[:, 1] + x[:, 3] / 2 # bottom right y
return y
在test.py中(转换后才能操作):

23、xywhn2xyxy、xyxy2xywhn、xyn2xy
这三个函数主要用于datasets.py文件中。主要是对图像进行一些变换操作。xywhn2xyxy是将xywh(normalized) -> x1y1x2y2。xyxy2xywhn是将x1y1x2y2 -> xywh(normalized)。xyn2xy是将xy(normalized) -> xy。这三个函数也是比较重要的,大家必须掌握。
23.1、xywhn2xyxy
这个函数是xywh(normalized) -> x1y1x2y2。
xywhn2xyxy函数代码:
def xywhn2xyxy(x, w=640, h=640, padw=0, padh=0):
"""用在datasets.py的 LoadImagesAndLabels类的__getitem__函数、load_mosaic、load_mosaic9等函数中
将xywh(normalized) -> x1y1x2y2 (x, y): 中间点 wh: 宽高 (x1, y1): 左上点 (x2, y2): 右下点
Convert nx4 boxes from [x, y, w, h] normalized to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
"""
y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
y[:, 0] = w * (x[:, 0] - x[:, 2] / 2) + padw # top left x
y[:, 1] = h * (x[:, 1] - x[:, 3] / 2) + padh # top left y
y[:, 2] = w * (x[:, 0] + x[:, 2] / 2) + padw # bottom right x
y[:, 3] = h * (x[:, 1] + x[:, 3] / 2) + padh # bottom right y
return y
在__getitem__函数中被调用:

23.2、xyxy2xywhn
这个函数是将x1y1x2y2 -> xywh(normalized)。
xyxy2xywhn函数代码:
def xyxy2xywhn(x, w=640, h=640, clip=False):
"""用在datasets.py的 LoadImagesAndLabels类的__getitem__函数中
将 x1y1x2y2 -> xywh(normalized) (x1, y1): 左上点 (x2, y2): 右下点 (x, y): 中间点 wh: 宽高
Convert nx4 boxes from [x1, y1, x2, y2] to [x, y, w, h] normalized where xy1=top-left, xy2=bottom-right
"""
if clip:
# 是否需要将x的坐标(x1y1x2y2)限定在尺寸(h, w)内
clip_coords(x, (h, w)) # warning: inplace clip
y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
y[:, 0] = ((x[:, 0] + x[:, 2]) / 2) / w # x center
y[:, 1] = ((x[:, 1] + x[:, 3]) / 2) / h # y center
y[:, 2] = (x[:, 2] - x[:, 0]) / w # width
y[:, 3] = (x[:, 3] - x[:, 1]) / h # height
return y
用在datasets.py的 LoadImagesAndLabels类的__getitem__函数中:

23.3、xyn2xy
这个函数是将xy(normalized) -> xy。
xyn2xy函数代码:
def xyn2xy(x, w=640, h=640, padw=0, padh=0):
"""用在datasets.py的load_mosaic和load_mosaic9函数中
xy(normalized) -> xy
Convert normalized segments into pixel segments, shape (n,2)
"""
y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
y[:, 0] = w * x[:, 0] + padw # top left x
y[:, 1] = h * x[:, 1] + padh # top left y
return y
在datasets.py的load_mosaic和load_mosaic9函数中使用:

24、non_max_suppression
NMS(非极大值抑制),这个函数相信大家都已经很熟悉了,这是目标检测最基本的操作之一了。可以说这个函数是这篇博客当中最重要的代码也不为过,所以大家一定要掌握这个函数(流程原理+代码)。
还写过一篇nms更详细:nms
non_max_suppression函数代码:
def non_max_suppression(prediction, conf_thres=0.25, iou_thres=0.45, classes=None,
agnostic=False, multi_label=True, labels=(), max_det=300, merge=False):
"""
Runs Non-Maximum Suppression (NMS) on inference results
Params:
prediction: [batch, num_anchors(3个yolo预测层), (x+y+w+h+1+num_classes)] = [1, 18900, 25] 3个anchor的预测结果总和
conf_thres: 先进行一轮筛选,将分数过低的预测框(<conf_thres)删除(分数置0)
iou_thres: iou阈值, 如果其余预测框与target的iou>iou_thres, 就将那个预测框置0
classes: 是否nms后只保留特定的类别 默认为None
agnostic: 进行nms是否也去除不同类别之间的框 默认False
multi_label: 是否是多标签 nc>1 一般是True
labels:
max_det: 每张图片的最大目标个数 默认1000
merge: use merge-NMS 多个bounding box给它们一个权重进行融合 默认False
Returns:
[num_obj, x1y1x2y2+object_conf+cls] = [5, 6]
"""
# Checks 检查传入的conf_thres和iou_thres两个阈值是否符合范围
assert 0 <= conf_thres <= 1, f'Invalid Confidence threshold {conf_thres}, valid values are between 0.0 and 1.0'
assert 0 <= iou_thres <= 1, f'Invalid IoU {iou_thres}, valid values are between 0.0 and 1.0'
# Settings 设置一些变量
nc = prediction.shape[2] - 5 # number of classes
min_wh, max_wh = 2, 4096 # (pixels) 预测物体宽度和高度的大小范围 [min_wh, max_wh]
max_nms = 30000 # 每个图像最多检测物体的个数 maximum number of boxes into torchvision.ops.nms()
time_limit = 10.0 # nms执行时间阈值 超过这个时间就退出了 seconds to quit after
redundant = True # 是否需要冗余的detections require redundant detections
multi_label &= nc > 1 # multiple labels per box (adds 0.5ms/img)
# batch_size个output 存放最终筛选后的预测框结果
output = [torch.zeros((0, 6), device=prediction.device)] * prediction.shape[0]
# 定义第二层过滤条件
xc = prediction[..., 4] > conf_thres # candidates
t = time.time() # 记录当前时刻时间
for xi, x in enumerate(prediction): # image index, image inference
# Apply constraints
# 第一层过滤 虑除超小anchor标和超大anchor x=[18900, 25]
x[((x[..., 2:4] < min_wh) | (x[..., 2:4] > max_wh)).any(1), 4] = 0 # width-height
# 第二层过滤 根据conf_thres虑除背景目标(obj_conf<conf_thres 0.1的目标 置信度极低的目标) x=[59, 25]
x = x[xc[xi]] # confidence
# {list: bs} 第一张图片的target[17, 5] 第二张[1, 5] 第三张[7, 5] 第四张[6, 5]
# Cat apriori labels if autolabelling 自动标注label时调用 一般不用
# 自动标记在非常高的置信阈值(即 0.90 置信度)下效果最佳,而 mAP 计算依赖于非常低的置信阈值(即 0.001)来正确评估 PR 曲线下的区域。
# 这个自动标注我觉得应该是一个类似RNN里面的Teacher Forcing的训练机制 就是在训练的时候跟着老师(ground truth)走
# 但是这样又会造成一个问题: 一直靠老师带的孩子是走不远的 这样的模型因为依赖标签数据,在训练过程中,模型会有较好的效果
# 但是在测试的时候因为不能得到ground truth的支持, 所以如果目前生成的序列在训练过程中有很大不同, 模型就会变得脆弱。
# 所以个人认为(个人观点): 应该在下面使用的时候有选择的开启这个trick 比如设置一个概率p随机开启 或者在训练的前n个epoch使用 后面再关闭
if labels and len(labels[xi]):
l = labels[xi]
v = torch.zeros((len(l), nc + 5), device=x.device)
v[:, :4] = l[:, 1:5] # box
v[:, 4] = 1.0 # conf
v[range(len(l)), l[:, 0].long() + 5] = 1.0 # cls
x = torch.cat((x, v), 0)
# 经过前两层过滤后如果该feature map没有目标框了,就结束这轮直接进行下一张图
if not x.shape[0]:
continue
# 计算conf_score
x[:, 5:] *= x[:, 4:5] # conf = obj_conf * cls_conf
# Box (center x, center y, width, height) to (x1, y1, x2, y2) 左上角 右下角 [59, 4]
box = xywh2xyxy(x[:, :4])
# Detections matrix nx6 (xyxy, conf, cls)
if multi_label:
# 第三轮过滤:针对每个类别score(obj_conf * cls_conf) > conf_thres [59, 6] -> [51, 6]
# 这里一个框是有可能有多个物体的,所以要筛选
# nonzero: 获得矩阵中的非0(True)数据的下标 a.t(): 将a矩阵拆开
# i: 下标 [43] j: 类别index [43] 过滤了两个score太低的
i, j = (x[:, 5:] > conf_thres).nonzero(as_tuple=False).T
# pred = [43, xyxy+score+class] [43, 6]
# unsqueeze(1): [43] => [43, 1] add batch dimension
# box[i]: [43,4] xyxy
# pred[i, j + 5].unsqueeze(1): [43,1] score 对每个i,取第(j+5)个位置的值(第j个class的值cla_conf)
# j.float().unsqueeze(1): [43,1] class
x = torch.cat((box[i], x[i, j + 5, None], j[:, None].float()), 1)
else: # best class only
conf, j = x[:, 5:].max(1, keepdim=True) # 一个类别直接取分数最大类的即可
x = torch.cat((box, conf, j.float()), 1)[conf.view(-1) > conf_thres]
# Filter by class 是否只保留特定的类别 默认None 不执行这里
if classes is not None:
x = x[(x[:, 5:6] == torch.tensor(classes, device=x.device)).any(1)]
# 检测数据是否为有限数 Apply finite constraint 这轮可有可无,一般没什么用 所以这里给他注释了
# if not torch.isfinite(x).all():
# x = x[torch.isfinite(x).all(1)]
# Check shape
n = x.shape[0] # number of boxes
if not n: # 如果经过第三轮过滤该feature map没有目标框了,就结束这轮直接进行下一张图
continue
elif n > max_nms: # 如果经过第三轮过滤该feature map还要很多框(>max_nms) 就需要排序
x = x[x[:, 4].argsort(descending=True)[:max_nms]] # sort by confidence
# 第4轮过滤 Batched NMS [51, 6] -> [5, 6]
c = x[:, 5:6] * (0 if agnostic else max_wh) # classes
# 做个切片 得到boxes和scores 不同类别的box位置信息加上一个很大的数但又不同的数c
# 这样作非极大抑制的时候不同类别的框就不会掺和到一块了 这是一个作nms挺巧妙的技巧
boxes, scores = x[:, :4] + c, x[:, 4] # boxes (offset by class), scores
# 返回nms过滤后的bounding box(boxes)的索引(降序排列)
# i=tensor([18, 19, 32, 25, 27]) nms后只剩下5个预测框了
i = torchvision.ops.nms(boxes, scores, iou_thres) # NMS
if i.shape[0] > max_det: # limit detections
i = i[:max_det]
if merge and (1 < n < 3E3): # Merge NMS (boxes merged using weighted mean)
# update boxes as boxes(i,4) = weights(i,n) * boxes(n,4)
iou = box_iou(boxes[i], boxes) > iou_thres # iou matrix
weights = iou * scores[None] # box weights 正比于 iou * scores
# bounding box合并 其实就是把权重和框相乘再除以权重之和
x[i, :4] = torch.mm(weights, x[:, :4]).float() / weights.sum(1, keepdim=True) # merged boxes
if redundant:
i = i[iou.sum(1) > 1] # require redundancy
output[xi] = x[i] # 最终输出 [5, 6]
# 看下时间超没超时 超时没做完的就不做了
if (time.time() - t) > time_limit:
print(f'WARNING: NMS time limit {time_limit}s exceeded')
break # time limit exceeded
return output
这个函数一般会用再detect.py或者test.py的模型前向推理结束之后: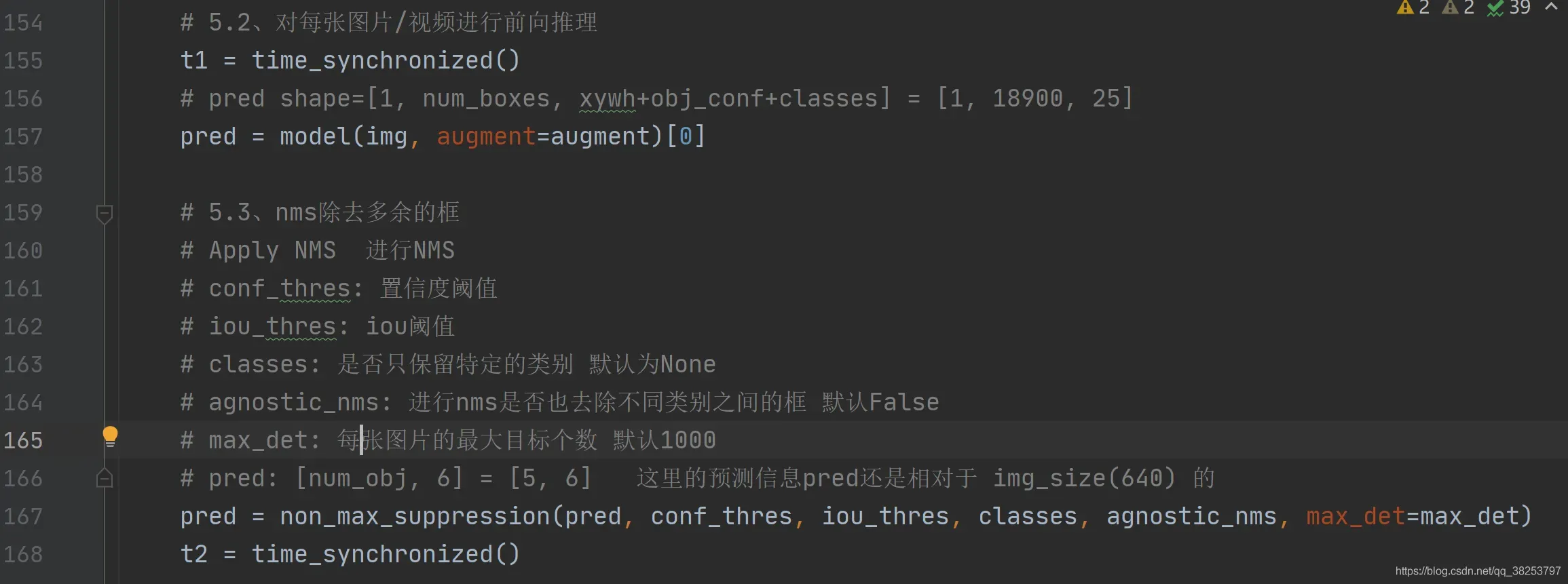
如果还不是很懂这个函数的代码,可以参考下我写的另一篇将yolov3博客,里面也很详细的解释了NMS函数流程和代码:【YOLO-V3-SPP 源码解读】三、预测模块.

25、strip_optimizer
这个函数是在模型训练完后, strip_optimizer函数将optimizer、training_results、updates…从保存的模型文件ckpt中删除。
strip_optimizer函数代码:
def strip_optimizer(f='best.pt', s=''):
"""用在train.py模型训练完后
将optimizer、training_results、updates...从保存的模型文件f中删除
Strip optimizer from 'f' to finalize training, optionally save as 's'
:params f: 传入的原始保存的模型文件
:params s: 删除optimizer等变量后的模型保存的地址 dir
"""
# x: 为加载训练的模型
x = torch.load(f, map_location=torch.device('cpu'))
# 如果模型是ema replace model with ema
if x.get('ema'):
x['model'] = x['ema']
# 以下模型训练涉及到的若干个指定变量置空
for k in 'optimizer', 'training_results', 'wandb_id', 'ema', 'updates': # keys
x[k] = None
x['epoch'] = -1 # 模型epoch恢复初始值-1
x['model'].half() # to FP16
for p in x['model'].parameters():
p.requires_grad = False
# 保存模型 x -> s/f
torch.save(x, s or f)
mb = os.path.getsize(s or f) / 1E6 # filesize
print(f"Optimizer stripped from {f},{(' saved as %s,' % s) if s else ''} {mb:.1f}MB")
用在train.py模型训练完后:

26、print_mutation
这个函数用来打印进化后的超参结果和results到evolve.txt和hyp_evolved.yaml中。
print_mutation函数代码:
def print_mutation(hyp, results, yaml_file='hyp_evolved.yaml', bucket=''):
"""用在train.py的进化超参结束后
打印进化后的超参结果和results到evolve.txt和hyp_evolved.yaml中
Print mutation results to evolve.txt (for use with train.py --evolve)
:params hyp: 进化后的超参 dict {28对 key:value}
:params results: tuple(7) (mp, mr, map50, map50:95, box_loss, obj_loss, cls_loss)
:params yaml_file: 要保存的进化后的超参文件名 runs\train\evolve\hyp_evolved.yaml
:params bucket: ''
"""
# 定义相关变量 并赋值 按指定格式输出
a = '%10s' * len(hyp) % tuple(hyp.keys()) # str 得到所有超参的key hyperparam keys
b = '%10.3g' * len(hyp) % tuple(hyp.values()) # str 得到所有超参的value hyperparam values
c = '%10.4g' * len(results) % results # c = results str (P, R, mAP@0.5, mAP@0.5:0.95, box_loss, obj_loss, cls_loss)
print('\n%s\n%s\nEvolved fitness: %s\n' % (a, b, c))
if bucket:
url = 'gs://%s/evolve.txt' % bucket
if gsutil_getsize(url) > (os.path.getsize('evolve.txt') if os.path.exists('evolve.txt') else 0):
os.system('gsutil cp %s .' % url) # download evolve.txt if larger than local
# 将结果c(results)和b(得到所有超参的value)写入evolve.txt中
with open('evolve.txt', 'a') as f: # append result
f.write(c + b + '\n')
x = np.unique(np.loadtxt('evolve.txt', ndmin=2), axis=0) # load unique rows
x = x[np.argsort(-fitness(x))] # sort
np.savetxt('evolve.txt', x, '%10.3g') # save sort by fitness
# Save yaml 保存yaml配置文件 为'hyp_evolved.yaml'
for i, k in enumerate(hyp.keys()): # 将hyp保存到数组hyp[]中
hyp[k] = float(x[0, i + 7])
with open(yaml_file, 'w') as f: # 将hyp写入yaml_file
results = tuple(x[0, :7])
c = '%10.4g' * len(results) % results # results (P, R, mAP@0.5, mAP@0.5:0.95, val_losses x 3)
f.write('# Hyperparameter Evolution Results\n# Generations: %g\n# Metrics: ' % len(x) + c + '\n\n')
yaml.safe_dump(hyp, f, sort_keys=False)
if bucket: # 如果需要存到谷歌云盘, 就上传 默认是不需要的
os.system('gsutil cp evolve.txt %s gs://%s' % (yaml_file, bucket)) # upload
用在train.py的进化超参结束后 :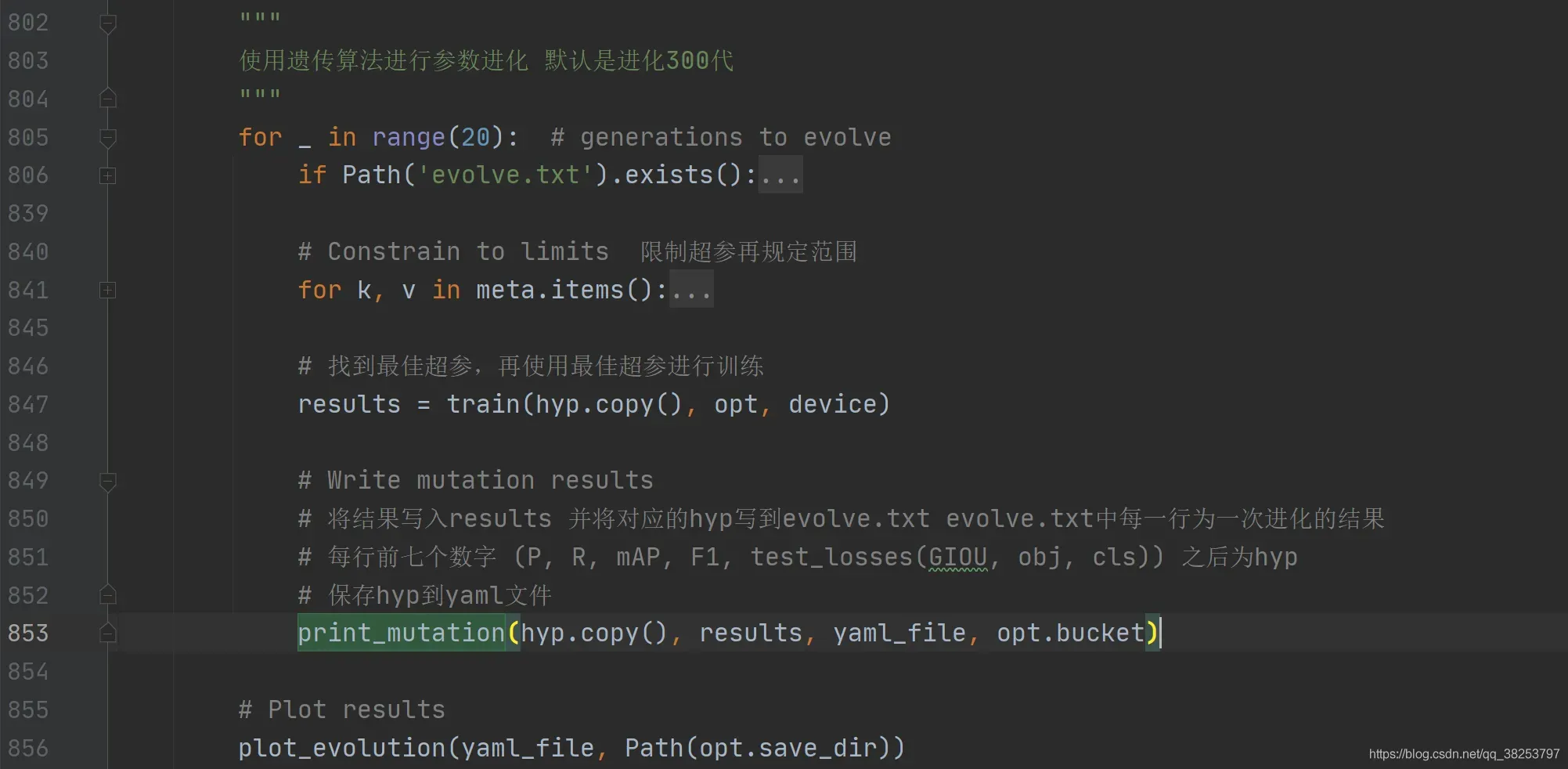

27、apply_classifier
这个函数定义了一个二级分类器来处理yolo的输出,可以将它用在detect.py中。这里写的这个函数只是一个普通的实现,你也可以根据自己的任务改写这个函数。不过这个函数我们几乎不会用它,因为它很容易出错。我们这里就不仔细介绍了,真的很难用到这个函数,随便看下就好。
功能代码:
def apply_classifier(x, model, img, im0):
"""用在detect.py文件的nms后继续对feature map送入model2 进行二次分类
定义了一个二级分类器来处理yolo的输出 当前实现本质上是一个参考起点,您可以使用它自行实现此项
比如你有照片与汽车与车牌, 你第一次剪切车牌, 并将其发送到第二阶段分类器, 以检测其中的字符
Apply a second stage classifier to yolo outputs
https://github.com/ultralytics/yolov5/issues/2700 这个函数使用起来很容易出错 不是很推荐使用
https://github.com/ultralytics/yolov5/issues/1472
:params x: yolo层的输出
:params model: 分类模型
:params img: 进行resize + pad之后的图片
:params im0: 原尺寸的图片
"""
im0 = [im0] if isinstance(im0, np.ndarray) else im0
for i, d in enumerate(x): # per image
if d is not None and len(d):
d = d.clone()
# Reshape and pad cutouts
b = xyxy2xywh(d[:, :4]) # boxes xyxy -> xywh
b[:, 2:] = b[:, 2:].max(1)[0].unsqueeze(1) # rectangle to square
b[:, 2:] = b[:, 2:] * 1.3 + 30 # pad
d[:, :4] = xywh2xyxy(b).long() # xywh -> xyxy
# Rescale boxes from img_size to im0 size
scale_coords(img.shape[2:], d[:, :4], im0[i].shape)
# Classes
pred_cls1 = d[:, 5].long() # 在之前的yolo模型预测的类别
ims = []
for j, a in enumerate(d): # per item
cutout = im0[i][int(a[1]):int(a[3]), int(a[0]):int(a[2])]
im = cv2.resize(cutout, (224, 224)) # BGR
# cv2.imwrite('test%i.jpg' % j, cutout)
im = im[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
im = np.ascontiguousarray(im, dtype=np.float32) # uint8 to float32
im /= 255.0 # 0 - 255 to 0.0 - 1.0
ims.append(im)
# 用model模型进行分类预测
pred_cls2 = model(torch.Tensor(ims).to(d.device)).argmax(1) # classifier prediction
# 保留预测一致的结果
x[i] = x[i][pred_cls1 == pred_cls2] # retain matching class detections
return x
28、increment_path
用于递增路径。比如我输入路径是run/train/exp,但是发现文件夹里面已经有这个文件了,那么就将文件路径扩展围为:runs/train/exp{sep}0, runs/exp{sep}1 etc。
increment_path函数代码:
def increment_path(path, exist_ok=False, sep='', mkdir=False):
"""这是个用处特别广泛的函数 train.py、detect.py、test.py等都会用到
递增路径 如 run/train/exp --> runs/train/exp{sep}0, runs/exp{sep}1 etc.
:params path: window path run/train/exp
:params exist_ok: False
:params sep: exp文件名的后缀 默认''
:params mkdir: 是否在这里创建dir False
"""
path = Path(path) # string/win路径 -> win路径
# 如果该文件夹已经存在 则将路径run/train/exp修改为 runs/train/exp1
if path.exists() and not exist_ok:
# path.suffix 得到路径path的后缀 ''
suffix = path.suffix
# .with_suffix 将路径添加一个后缀 ''
path = path.with_suffix('')
# 模糊搜索和path\sep相似的路径, 存在一个list列表中 如['runs\\train\\exp', 'runs\\train\\exp1']
# f开头表示在字符串内支持大括号内的python表达式
dirs = glob.glob(f"{path}{sep}*")
# r的作用是去除转义字符 path.stem: 没有后缀的文件名 exp
# re 模糊查询模块 re.search: 查找dir中有字符串'exp/数字'的d \d匹配数字
# matches [None, <re.Match object; span=(11, 15), match='exp1'>] 可以看到返回span(匹配的位置) match(匹配的对象)
matches = [re.search(rf"%s{sep}(\d+)" % path.stem, d) for d in dirs]
# i = [1]
i = [int(m.groups()[0]) for m in matches if m] # indices
# 生成需要生成文件的exp后面的数字 n = max(i) + 1 = 2
n = max(i) + 1 if i else 1 # increment number
# 返回path runs/train/exp2
path = Path(f"{path}{sep}{n}{suffix}") # update path
# path.suffix文件后缀 path.parent 路径的上级目录 runs/train/exp2
dir = path if path.suffix == '' else path.parent # directory
if not dir.exists() and mkdir: # mkdir 默认False 先不创建dir
dir.mkdir(parents=True, exist_ok=True) # make directory
return path # 返回runs/train/exp2
train.py中使用:



29、save_one_box
这个函数是用来将预测到的目标从原图中扣出来 剪切好 并保存 会在runs/detect/expn下生成crops文件,将剪切的图片保存在里面。这个函数回调用xyxy2xywh、xywh2xyxy、clip_coords、increment_path等函数。
save_one_box函数代码:
def save_one_box(xyxy, im, file='image.jpg', gain=1.02, pad=10, square=False, BGR=False, save=True):
"""用在detect.py文件中 由opt的save-crop参数控制执不执行
将预测到的目标从原图中扣出来 剪切好 并保存 会在runs/detect/expn下生成crops文件,将剪切的图片保存在里面
Save image crop as {file} with crop size multiple {gain} and {pad} pixels. Save and/or return crop
:params xyxy: 预测到的目标框信息 list 4个tensor x1 y1 x2 y2 左上角 + 右下角
:params im: 原图片 需要裁剪的框从这个原图上裁剪 nparray (1080, 810, 3)
:params file: runs\detect\exp\crops\dog\bus.jpg
:params gain: 1.02 xyxy缩放因子
:params pad: xyxy pad一点点边界框 裁剪出来会更好看
:params square: 是否需要将xyxy放缩成正方形
:params BGR: 保存的图片是BGR还是RGB
:params save: 是否要保存剪切的目标框
"""
xyxy = torch.tensor(xyxy).view(-1, 4) # list -> Tensor [1, 4] = [x1 y1 x2 y2]
b = xyxy2xywh(xyxy) # xyxy to xywh [1, 4] = [x y w h]
if square: # 一般不需要rectangle to square
b[:, 2:] = b[:, 2:].max(1)[0].unsqueeze(1) # attempt rectangle to square
# box wh * gain + pad box*gain再加点pad 裁剪出来框更好看
b[:, 2:] = b[:, 2:] * gain + pad
xyxy = xywh2xyxy(b).long() # xywh -> xyxy
# 将boxes的坐标(x1y1x2y2 左上角右下角)限定在图像的尺寸(img_shape hw)内
clip_coords(xyxy, im.shape)
# crop: 剪切的目标框hw
crop = im[int(xyxy[0, 1]):int(xyxy[0, 3]), int(xyxy[0, 0]):int(xyxy[0, 2]), ::(1 if BGR else -1)]
if save:
# 保存剪切的目标框
cv2.imwrite(str(increment_path(file, mkdir=True).with_suffix('.jpg')), crop)
return crop
用于detect.py文件中: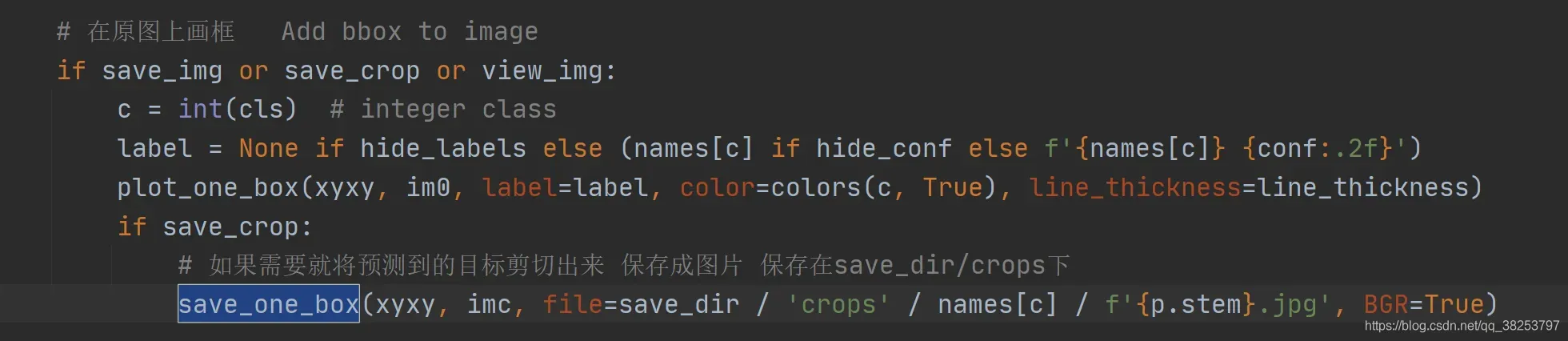

30、resample_segments
这个函数是 对segment重新采样,比如说segment坐标只有100个,通过interp函数将其采样为n个(默认1000)。
resample_segments函数代码:
def resample_segments(segments, n=1000):
"""用在datasets.py文件中的random_perspective函数中
对segment重新采样,比如说segment坐标只有100个,通过interp函数将其采样为n个(默认1000)
:params segments: [N, x1x2...]
:params n: 采样个数
:return segments: [N, n/2, 2]
"""
for i, s in enumerate(segments):
# 0~len(s)-1 取n(1000)个点
x = np.linspace(0, len(s) - 1, n)
# 0, 1, 2, ..., len(s)-1
xp = np.arange(len(s))
# 对所有的segments都进行重新采样 比如说segment坐标只有100个,通过interp函数将其采样为n个(默认1000)
segments[i] = np.concatenate([np.interp(x, xp, s[:, i]) for i in range(2)]).reshape(2, -1).T # segment xy
# [N, n/2, 2]
return segments
在datasets.py文件中的random_perspective函数中调用:
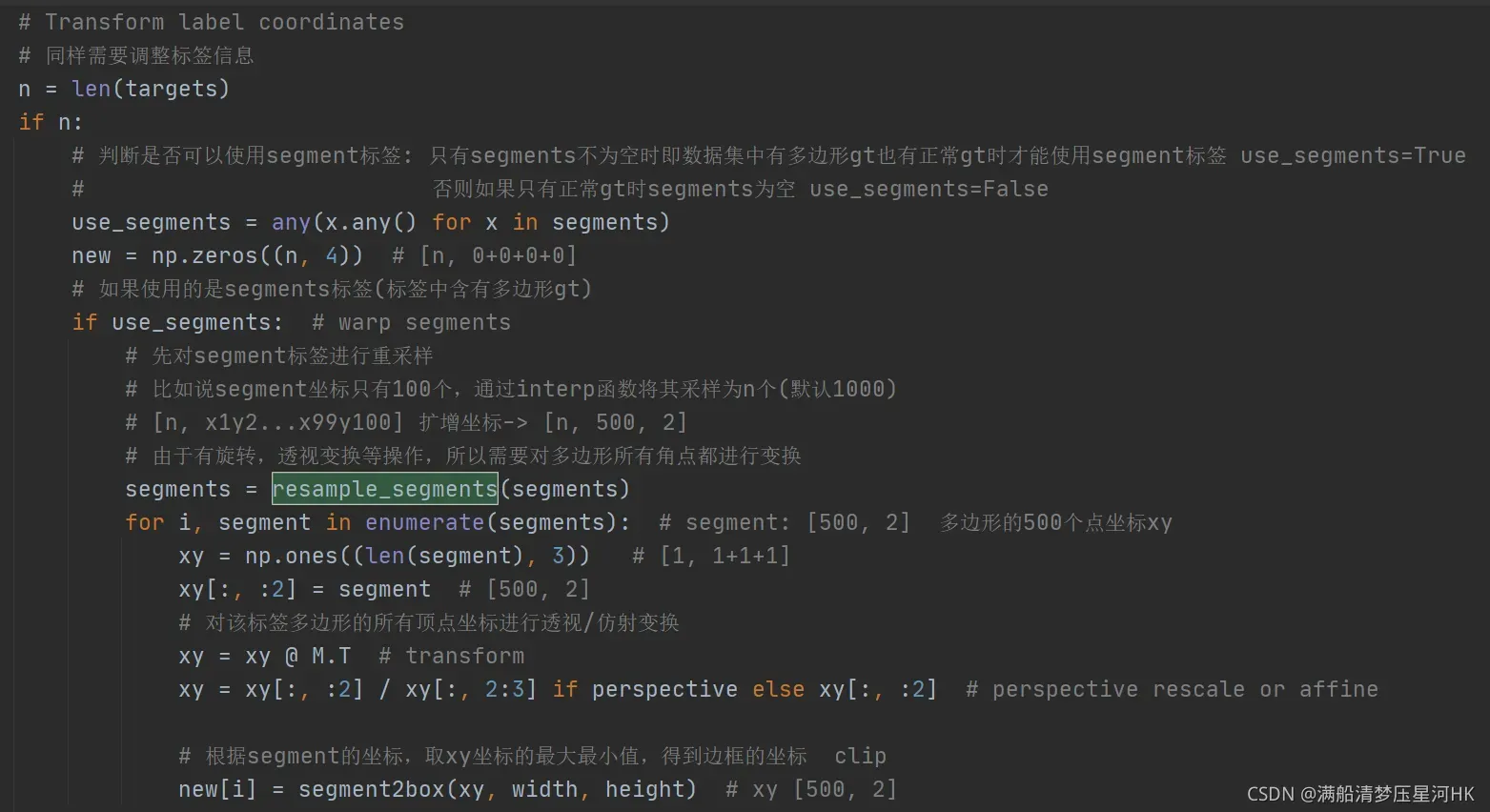

31、segment2box
该功能是将多边形标签(不是矩形标签,多边形未知)转换为矩形标签。
segment2box函数代码:
def segment2box(segment, width=640, height=640):
"""用在datasets.py文件中的random_perspective函数中
将一个多边形标签(不是矩形标签 到底是几边形未知)转化为一个矩形标签
方法: 对多边形所有的点x1y1 x2y2... 获取其中的(x_min,y_min)和(x_max,y_max) 作为矩形label的左上角和右下角
Convert 1 segment label to 1 box label, applying inside-image constraint
:params segment: 一个多边形标签 [n, 2] 传入这个多边形n个顶点的坐标
:params width: 这个多边形所在图片的宽度
:params height: 这个多边形所在图片的高度
:return 矩形标签 [1, x_min+y_min+x_max+y_max]
"""
# 分别获取当前多边形中所有多边形点的x和y坐标
x, y = segment.T # segment xy
# inside: 筛选条件 xy坐标必须大于等于0 x坐标必须小于等于宽度 y坐标必须小于等于高度
inside = (x >= 0) & (y >= 0) & (x <= width) & (y <= height)
# 获取筛选后的所有多边形点的x和y坐标
x, y, = x[inside], y[inside]
# 取当前多边形中xy坐标的最大最小值,得到边框的坐标xyxy
return np.array([x.min(), y.min(), x.max(), y.max()]) if any(x) else np.zeros((1, 4))
在datasets.py文件中的random_perspective函数中调用: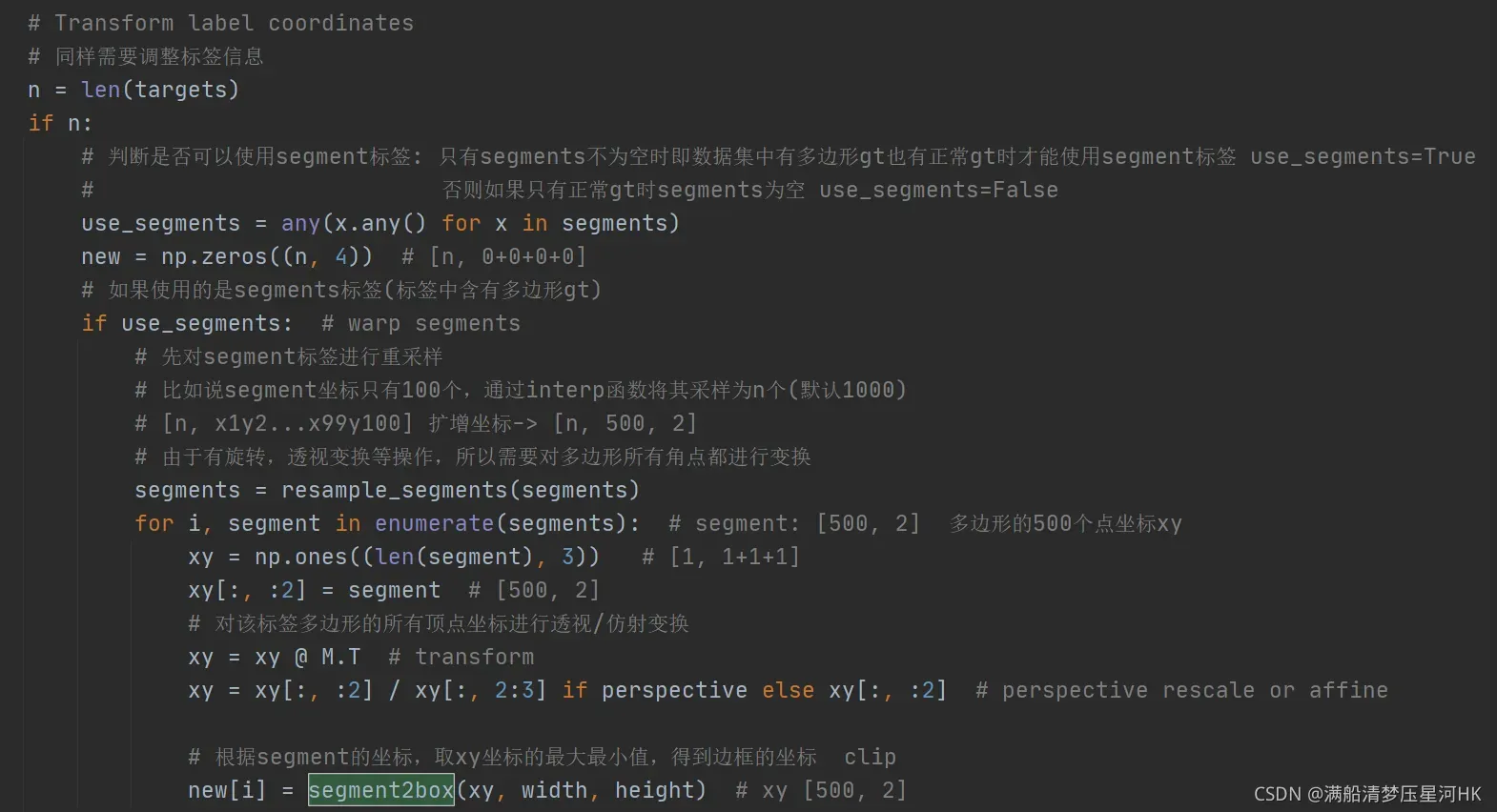

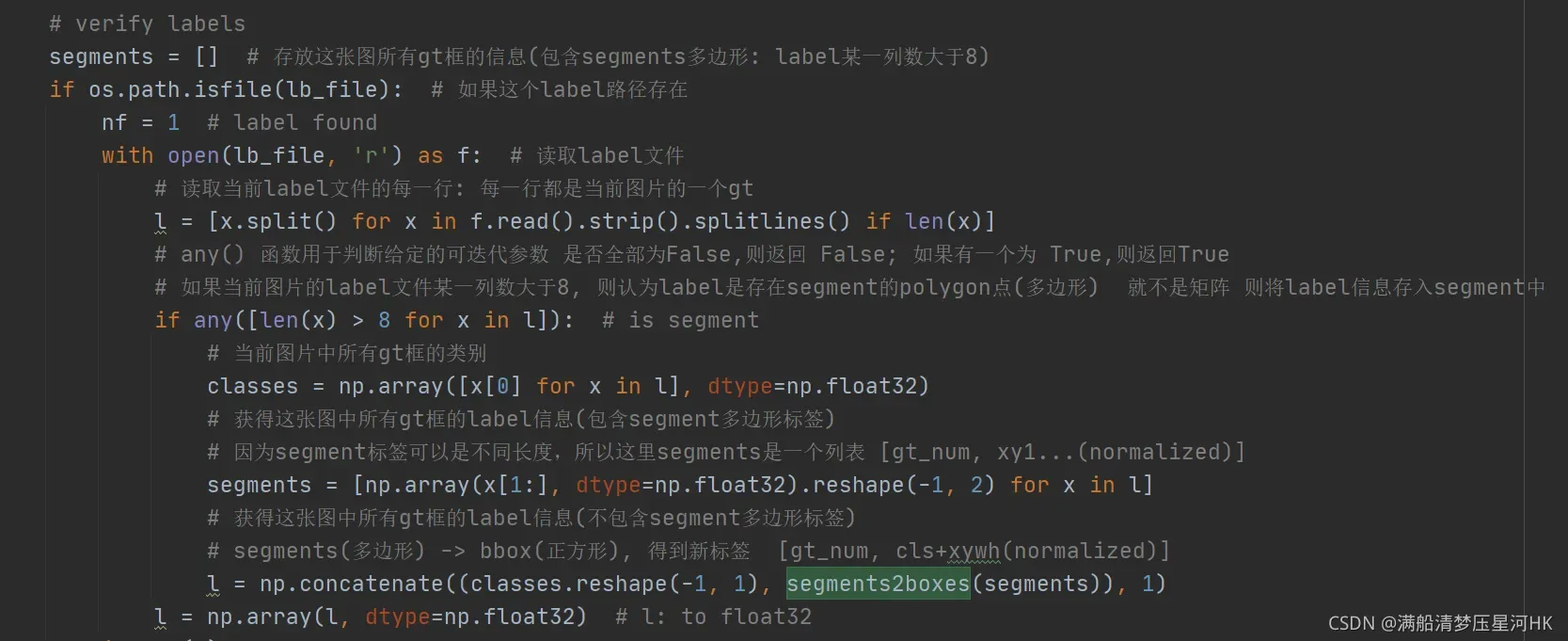
32、segments2boxes
该函数将多个多边形标签(不是矩形标签,最终未知)转换为多个矩形标签。
segments2boxes模块代码:
def segments2boxes(segments):
"""用在datasets.py文件中的verify_image_label函数中
将多个多边形标签(不是矩形标签 到底是几边形未知)转化为多个矩形标签
Convert segment labels to box labels, i.e. (cls, xy1, xy2, ...) to (cls, xywh)
:params segments: [N, cls+x1y1+x2y2 ...]
:return [N, cls+xywh]
"""
boxes = []
for s in segments:
# 分别获取当前多边形中所有多边形点的x和y坐标
x, y = s.T
# 取当前多边形中x和y坐标的最大最小值,得到边框的坐标xyxy
boxes.append([x.min(), y.min(), x.max(), y.max()])
# [N, cls+xywh]
return xyxy2xywh(np.array(boxes))
在datasets.py文件中的verify_image_label函数中调用:

总结
这个文件的代码主要是一些通用的工具功能,会在整个项目的文件中广泛使用,所以比较重要,希望大家能掌握。
比较重要的函数有:set_logging、init_seeds、get_latest_run、colorstr、check_git_status、check_requirements、make_pisible、check_file、check_dataset、one_cycle、labels_to_class_weights、labels_to_image_weights、strip_optimizer、print_mutation、save_one_box、increment_path。
非常重要的有:clip_coords、scale_coords、xyxy2xywh、xywh2xyxy、xywhn2xyxy、xyxy2xywhn、xyn2xy、non_max_suppression。
–2021.08.03 19:55
版权声明:本文为博主满船清梦压星河HK原创文章,版权归属原作者,如果侵权,请联系我们删除!
原文链接:https://blog.csdn.net/qq_38253797/article/details/119348092