OpenCV介绍
OpenCV是一个的跨平台计算机视觉库,可以运行在 Linux、Windows 和 Mac OS 操作系统上。它轻量级而且高效——由一系列 C 函数和少量 C++ 类构成,同时也提供了Python接口,实现了图像处理和计算机视觉方面的很多通用算法。在本文中,将介绍 OpenCV 库,包括它的主要模块和典型应用场景。
Python安装OpenCV
对于Linux和Windows操作系统,首需要在shell或cmd中运行以下命令安装 NumPy:
pip install numpy
然后再安装 OpenCV,可以选择两种不同版本:
- 仅安装主模块包pip install opencv-python
- 安装完整包(包括主模块和附加模块)pip install opencv-contrib-python
OpenCV主要模块
OpenCV 可以被划分为不同模块,其主要模块如下: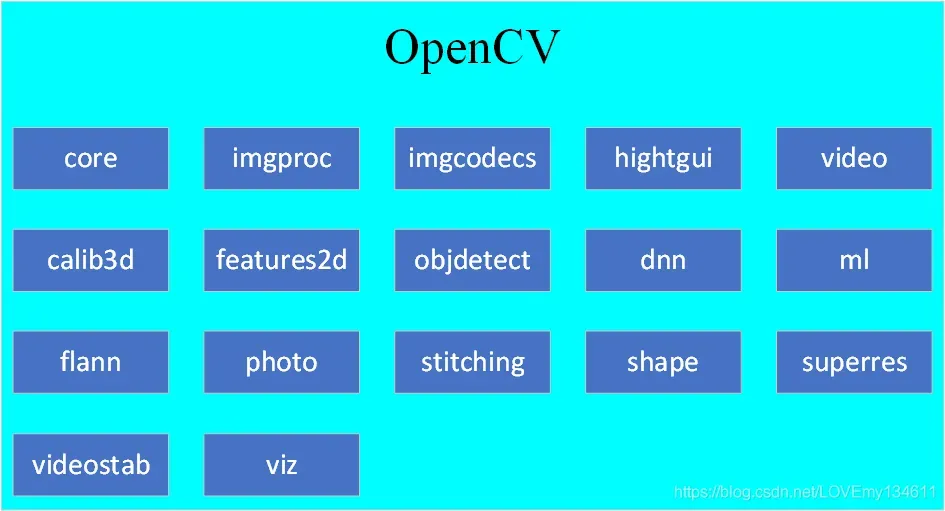
下表总结了各个主要模块的功能:
| 模块 | 介绍 |
|---|---|
| core | 核心模块,是定义基本数据结构的模块,也包括库中所有其他模块使用的基本函数 |
| imgproc | 图像处理模块,包括图像滤波、几何图像变换、颜色空间变换和直方图 |
| imgcodecs | 图像文件读写 |
| highgui | 高级GUI,提供UI功能的接口,可以执行以下操作:创建和操作可以显示的窗口、将滑动条添加到窗口、键盘命令和处理鼠标事件等 |
| videoio | 视频I/O,视频捕获和视频编解码器的接口 |
| video | 视频分析模块,包括背景减法、运动估计和目标跟踪算法 |
| calib3d | 摄像机标定和三维重建,包括基本的多视点几何算法、立体匹配算法、目标姿态估计、单摄像机和立体摄像机标定以及三维重建 |
| features2d | 二维特征框架,该模块包括特征检测器、描述符和描述符匹配器 |
| objdetect | 目标检测,检测预定义类的对象和实例(例如,人脸、眼睛、人和汽车) |
| dnn | 深度神经网络(Deep neural network, DNN)模块,本模块包含以下内容:用于创建新层的API、一组预定义的常用层、从层构造和修改神经网络的API、从不同深度学习框架加载序列化网络模型的功能等 |
| ml | 机器学习库(Machine Learning Library, MLL)是一组可用于分类、回归和聚类目的的类和方法 |
| flann | 快速近似近邻库(Fast Library for Approximate Nearest Neighbors, FLANN)是一组非常适合快速近邻搜索的算法,用于多维空间中的聚类和搜索 |
| photo | 计算摄影,提供一些计算摄影的函数 |
| stitching | 图像拼接,实现了一个自动拼接全景图像的拼接流水线 |
| shape | 形状距离和匹配模块,可用于形状匹配、检索或比较 |
| superres | 超分辨率,包含一组可用于提高分辨率的类和方法 |
| videostab | 视频稳定,包含一组用于视频稳定的类和方法 |
| viz | 三维可视化工具,用于显示与场景交互的小部件 |
OpenCV应用场景
OpenCV 可以应用但不仅限于以下场景:二维和三维特征提取、街景图像拼接、人脸识别系统、手势识别、人机交互、动作识别、物体识别、自动检查和监视、分割与识别、医学图像分析、运动跟踪、增强现实、视频/图像搜索与检索、机器人与无人驾驶汽车导航与控制、驾驶员疲劳驾驶检测等。
OpenCV图像处理基础
图像库
下面首先从理论上介绍图像的相关概念。
图像处理中的主要问题
我们看可以把图像看作是三维世界的二维视图,那么数字图像作为2D图像,可以使用称为像素的有限数字集进行表示(像素的概念将在像素、颜色、通道、图像和颜色空间部分中详细解释)。我们可以,将计算机视觉的目标定义为将这些2D数据转换为以下内容:
- 新的数据表示(例如新图像)
- 决策目标(例如,执行特定的决策任务)
- 目标结果(例如,图像分类)
- 信息提取(例如,对象检测)
在图像处理过程中,经常会遇到以下问题:
- 受透视影响的图像模糊会导致图像的视觉外观发生变化。例如,从不同的角度看同一个物体会产生不同的图像;
- 图像经常受到许多自然因素的影响,例如照明、天气、反射和运动;
- 图像中的一些物体也可能被其他物体遮挡,使得被遮挡的物体难以检测或分类。随着遮挡程度的增加,图像处理(例如图像分类)的任务可能非常具有挑战性。
为了更好地解释上述问题,我们假设我们需要开发一个人脸检测系统。该系统应该足够强大以应对照明或天气条件的变化;此外,系统应该能够处理头部运动 – 用户的头部可以在坐标系的每个轴上执行某种程度的运动(抬头、摇头)和低头,用户可以更近一点或更远一点远离相机)。虽然许多人脸检测算法在人脸靠近正面时表现出良好的性能,但如果人脸不是正面的(例如,侧向相机),则算法无法检测到它。此外,即使用户戴着眼镜或太阳镜,该算法也需要检测面部(即使这会在眼睛区域造成遮挡)。综上所述,在开发计算机视觉项目时,我们必须将所有这些因素都考虑在内,一个好的表征方法是使用大量的测试图像来验证算法。我们还可以根据测试图像的不同难度对测试图像进行分类,以发现算法的弱点,提高算法的鲁棒性。
图像处理流程
一个完整的图像处理程序通常可以分为以下三个步骤:
- 读取一张图片,图片的获取可以来自很多不同的来源(相机、视频流、磁盘、在线资源),所以图片的读取可能涉及到多个函数,从而可以从不同的来源读取图片;
- 图像处理,通过应用图像处理技术对图像进行处理,以实现所需的功能(例如,检测图像中的猫);
- 显示结果,以人类可读的方式呈现图像处理的结果(例如,在图像中绘制边界框,有时可能需要将其保存到磁盘)。
此外,上述第2步图像处理可以进一步分为三个不同的处理级别:
- 低级处理(或预处理,如果它不会引起歧义),通常将一张图像作为输入,并输出另一张图像。本步骤可应用的步骤包括但不限于以下方法:去噪、图像锐化、光照归一化、透视校正等;
- 中层处理:是将预处理后的图像提取其主要特征(例如采用 DNN 模型得到的图像特征),输出某种形式的图像表示,它提取了用于图像进一步处理的主要特征。
- 高层处理:接受中层处理得到的图像特征,输出最终结果。例如,处理的输出可以是检测到的面部。
像素、颜色、通道、图像和颜色空间
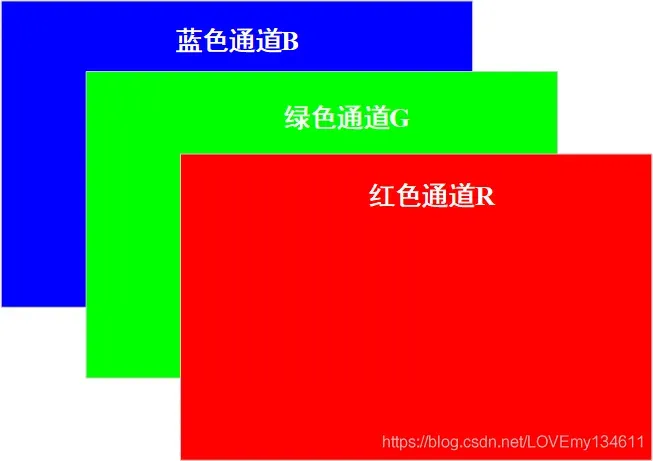
在表示图像时,有多种不同的颜色模型,但最常见的是红、绿、蓝 (RGB) 模型。
RGB模型是一种加法颜色模型,其中原色 (在RGB模型中,原色是红色 R、绿色 G 和蓝色 B) 混合在一起就可以用来表示广泛的颜色范围。
每个原色 (R, G, B) 通常表示一个通道,其取值范围为[0, 255]内的整数值。因此,每个通道有共256个可能的离散值,其对应于用于表示颜色通道值的总比特数 ()。此外,由于有三个不同的通道,使用 RGB 模型表示的图像称为24位色深图像:
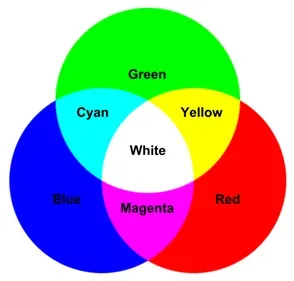
在上图中,可以看到RGB颜色空间的“加法颜色”属性:
- 红加绿变黄
- 蓝色加红色为洋红色
- 蓝色加绿色变成青色
- 三基色加在一起就是白色
因此,如前所述,RGB颜色模型中,特定颜色可以由红、绿和蓝值分量合成表示,将像素值表示为RGB三元组(r, g, b)。典型的RGB颜色选择器如下图所示:

分辨率为 800×1200 的图像是一个包含800列和1200行的网格,每个网格就是称为一个像素,因此其中包含 800×1200=96 万像素。应当注意,图像中有多少像素并不表示其物理尺寸(一个像素不等于一毫米)。相反,像素的大小取决于为该图像设置的每英寸像素数(Pixels Per Inch, PPI)。图像的PPI一般设置在[200-400]范围内。
计算PPI的基本公式如下:
- PPI=宽度(像素) / 图像宽度(英寸)
- PPI=高度(像素) / 图像高度(英寸)
例如,一个4×6英寸图像,图像分辨率为 800×1200,则PPI是200。
图片说明
图像可以描述为2D函数,其中
是空间坐标,而
是图像在点
处的亮度或灰度或颜色值。另外,当f(x, y)和(x, y)值都是有限离散量时,该图像也被称为数字图像,此时:
- ,其中
是图像的高度
- ,其中
是图像的宽度
- ,其中
(对于8位灰度图像)
彩色图像也可以用同样的方式表示,只是我们需要定义三个函数来分别表示红色、绿色和蓝色值。这三个单独的函数中的每一个都遵循与为灰度图像定义的函数相同的公式。我们将这三个函数的子索引 R、G 和 B 分别表示为
、
和
。
同样,黑白图像也可以表示为相同的形式,其仅需要一个函数来表示图像,且只能取两个值。通常,0 表示黑色、1 表示白色。
下图显示了三种不同类型的图像(彩色、灰度和黑白):
数字图像可以看作是真实场景的近似,因为的值是一个有限离散量。此外,灰度和黑白图像每个点只有一个值,而彩色图像每个点需要三个函数,对应于图像的红色、绿色和蓝色分量。
图像文件类型
尽管在 OpenCV 中处理的图像时,可以将图像看作 RGB 三元组的矩阵(在 RGB 图像模型情况下),但它们不一定是以这种格式创建、存储或传输的。有许多不同的文件格式,如GIF、PNG、位图或JPEG,使用不同形式的压缩(无损或有损)来更有效地表示图像。
下表列示了 OpenCV 支持的文件格式及其关联的文件扩展名:
| 文件格式 | 文件扩展名 |
|---|---|
| Windows bitmaps | *.bmp和*.dib |
| JPEG files | *.JPEG、*.jpg 和 *.jpe |
| JPEG 2000 files | *.jp2 |
| Portable Network Graphics | *.png |
| Portable image format | *.pbm、*.pgm 和 *.ppm |
| TIFF files | *.TIFF 和 *.tif |
将无损或有损压缩算法应用于图像会导致图像比未压缩图像占用更少的存储空间。其中,在无损压缩算法中,得到的图像与原始图像是等价的,也就是说,经过解压处理后,得到的图像与原始图像完全等价(相同);而在有损压缩算法中,得到的图像与原图并不完全相同,这意味着图像中的一些细节丢失了,而在很多有损压缩算法中,压缩级别是可以调整的。
OpenCV中的坐标系
为了更好的展示 OpenCV 中的坐标系以及如何访问各个像素,查看以下低分辨率图像为例:
这个图片的尺寸是 32×41 像素,也就是说,这个图像有 1312 个像素。为了进一步说明,我们可以在每个轴上添加像素计数,如下图所示: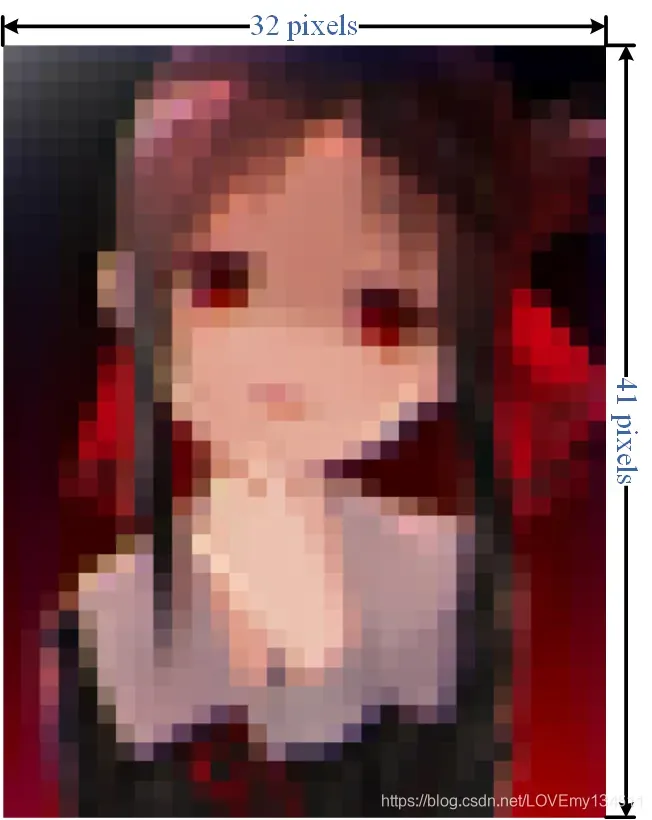
现在,我们来看看形式的像素索引。请注意,像素索引起始值为零,这意味着左上角位于
,而不是
。下面的图像,索引了 4 个单独的像素,图像的左上角是原点的坐标:
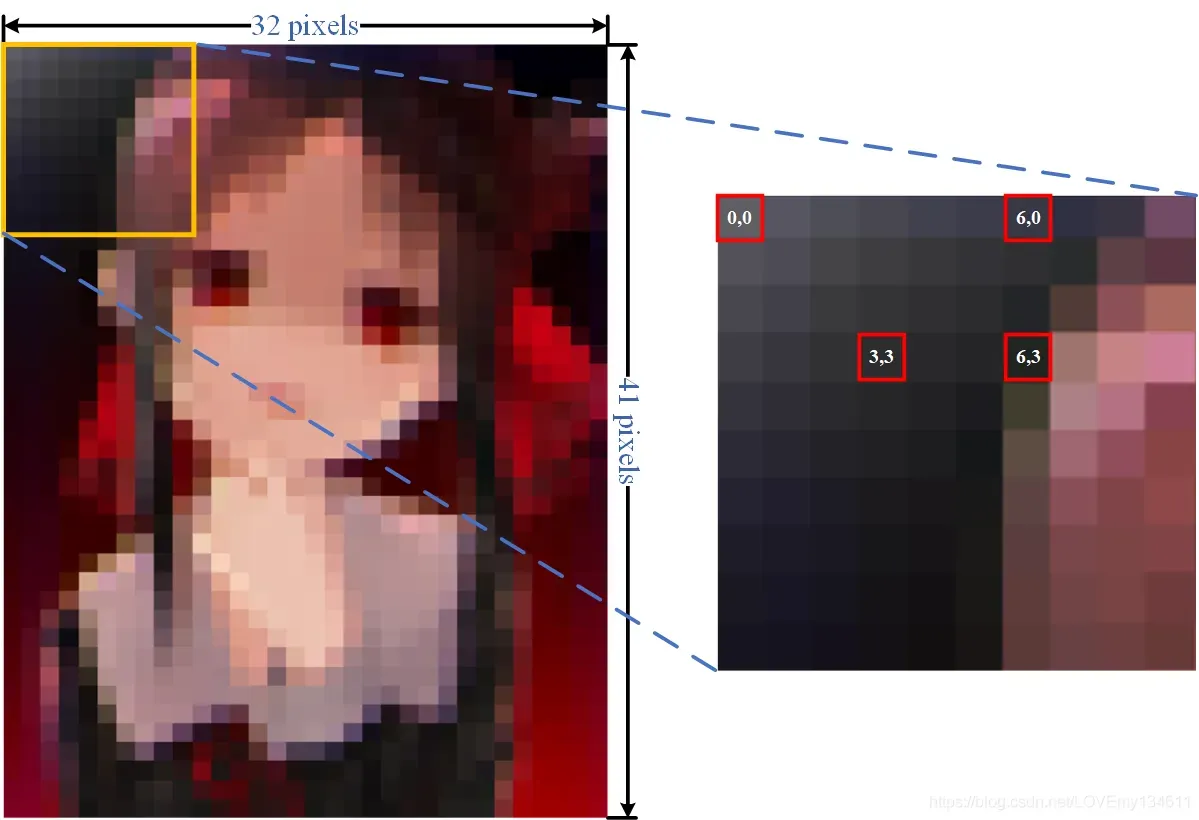
单个像素的信息可以从图像中提取,方法与 Python 中引用数组的单个元素相同。
OpenCV中的通道顺序
在 OpenCV 使用中,使用的颜色通道顺序为 BGR 颜色格式而不是 RGB 格式。可以在下图中看到三个通道的顺序:
BGR 图像的像素结构如下图所示,作为演示,图示详细说明了如何访问pixel(y=n, x=1):
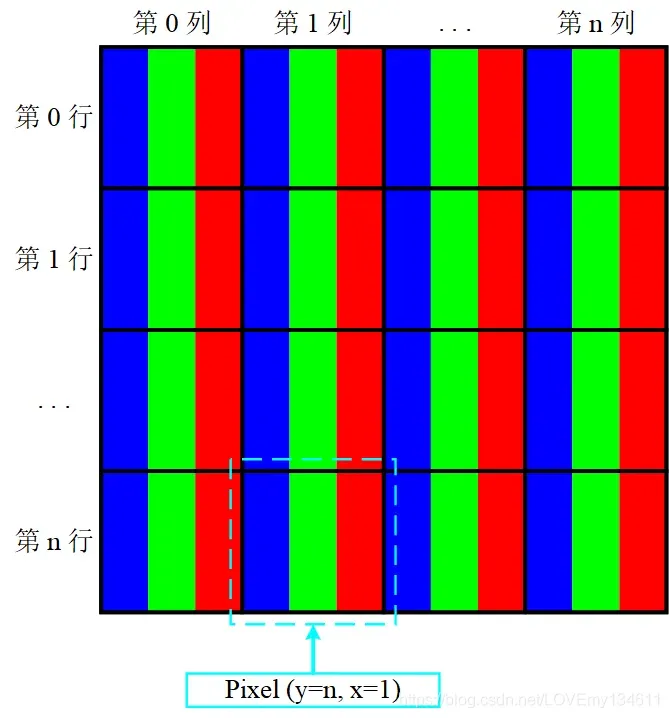
Tips:OpenCV 的最初开发人员选择了 BGR 颜色格式(而不是 RGB 格式),是因为当时 BGR 颜色格式在软件供应商和相机制造商中非常流行,因此选择 BGR 是出于历史原因。
此外,也有其他 Python 包使用的是 RGB 颜色格式(例如,Matplotlib 使用 RGB 颜色格式,Matplotlib是最流行的 2D Python 绘图库,提供多种绘图方法,可以查看Python-Matplotlib 可视化获取更多详细信息)。因此,我们需要知道如何将图像从一种格式转换为另一种格式。
当我们掌握了将图像从一种格式转换为另一种格式的方法后,就可以选择使用OpenCV进行图像处理,同时利用Matplotlib包提供的函数来显示图像,接下来,让我们看看如何处理两个库采用的不同颜色格式。
首先,我们使用cv2.imread()函数加载图像:
import cv2
img_OpenCV = cv2.imread('sigonghuiye.jpeg')
图像存储在img_OpenCV变量中,因为cv2.imread()函数以 BGR 顺序加载图像。然后,我们使用cv2.split()函数将加载的图像分成三个通道 (b, g, r) 。这个函数的参数就是我们要分割的图像:
b, g, r = cv2.split(img_OpenCV)
下一步是合并通道(以便根据通道提供的信息构建新图像),但合并时顺序与原图像不同。我们更改 b 和 r 通道的顺序以遵循 RGB 格式,即我们所需要的 Matplotlib 格式:
img_matplotlib = cv2.merge([r, g, b])
此时,我们有两个图像 (img_OpenCV 和 img_matplotlib),接下来,我们将分别使用 OpenCV 和 Matplotlib 绘制她们,以便我们可以对比结果。首先,我们将用 Matplotlib 显示这两个图像。
为了在同一个窗口中使用 Matplotlib 显示两个图像,我们将使用subplot,它将多个图像放置在同一个窗口中。可以在subplot中使用三个参数,例如subplot(m,n,p),此时,子图处理网格中的图,其中
确定行数,
确定列数,而
确定要在网格中放置图的位置。要使用Matplotlib显示图像,需要使用imshow函数。
在这种情况下,当我们水平显示两个图像时,、
。我们将对第一个子图 (img_OpenCV) 使用
,对第二个子图(img_matplotlib) 使用
:
from matplotlib import pyplot as plt
plt.subplot(121)
plt.imshow(img_OpenCV)
plt.subplot(122)
plt.imshow(img_matplotlib)
plt.show()
程序输出如下所示:
可以看出,第一个子图以错误的颜色( BGR 顺序)显示图像,而第二个子图以正确的颜色( RGB 顺序)显示图像。接下来,我们使用cv2.imshow()显示两个图像:
cv2.imshow('bgr image', img_OpenCV)
cv2.imshow('rgb image', img_matplotlib)
cv2.waitKey(0)
cv2.destroyAllWindows()
以下屏幕截图显示了执行上述代码得到的结果: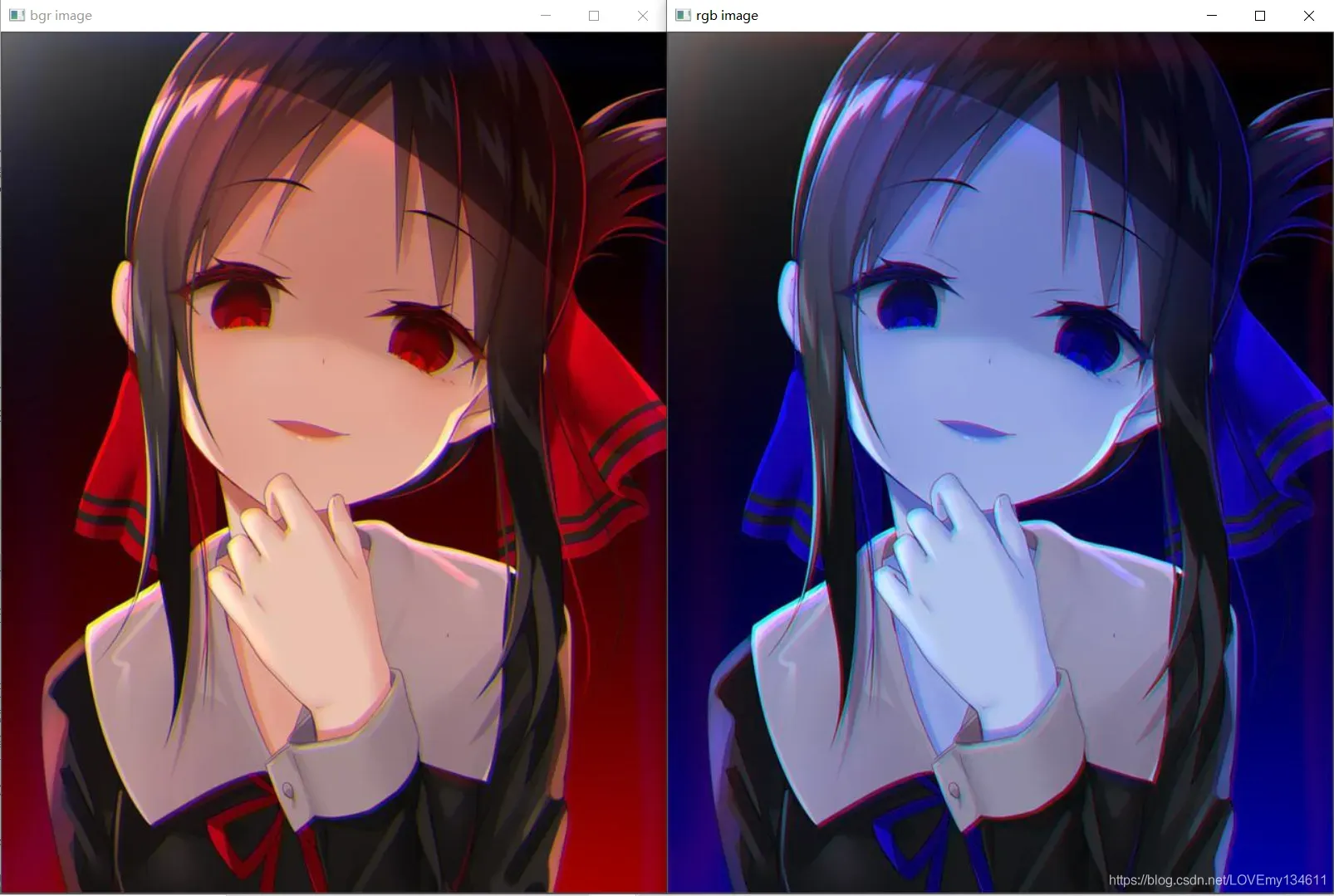
正如预期的那样,在屏幕截图中,第一个图以正确的颜色显示图像,而第二个图以错误的颜色显示图像。
此外,如果我们想在同一个窗口中显示两个图像,可以构建一个包含这两个图像的拼接图像,将两张图片水平连接起来。为此,我们需要使用NumPy的concatenate()方法。该方法的参数是要连接的两个图像和要在哪个轴上进行堆叠,这里,我们令axis = 1(水平堆叠它们):
import numpy as np
img_concats = np.concatenate((img_OpenCV, img_matplotlib), axis=1)
cv2.imshow('bgr image and rgb image', img_concats)
cv2.waitKey(0)
cv2.destroyAllWindows()
下图显示了连接的图像: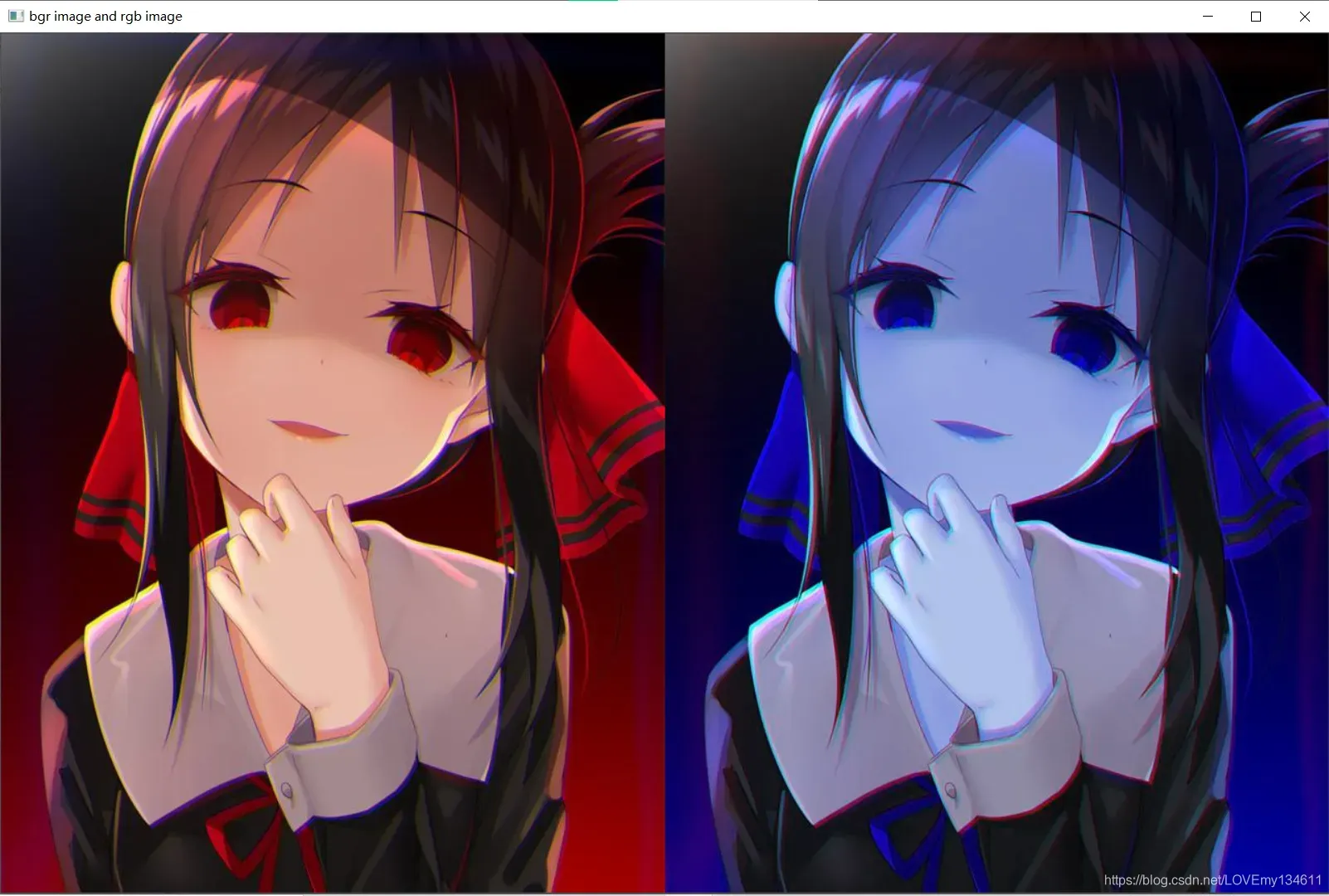
需要考虑的一个因素是cv2.split()是一项耗时的操作。如果确实需要划分不同通道,应当首先考虑使用 NumPy 索引。例如,如果想获取图像的一个通道,则可以使用 NumPy 索引获取通道:
B = img_OpenCV[:, :, 0]
G = img_OpenCV[:, :, 1]
R = img_OpenCV[:, :, 2]
另一个需要注意的是,可以使用NumPy在一条语句中将图像从 BGR 转换为 RGB:
img_matplotlib = img_OpenCV[:, :, ::-1]
在不同颜色空间中访问和操作OpenCV中的像素
本节将介绍如何使用 OpenCV 访问和读取像素值以及如何修改它们。此外,还将学习如何访问图像属性。如果想一次处理多个像素,则需要创建图像区域 (Region of Image, ROI)。
在 Python 中,图像表示为 NumPy 数组。因此,示例中包含的大多数操作都与 NumPy 相关,建议需要对 NumPy 包一些了解,才能更好明白示例代码的原理,但即使不了解也没关系,必要时会对所用函数进行讲解。
彩色图像访问和操作OpenCV中的像素
现在,我们来看看如何在 OpenCV 中处理BGR图像。如上所述,OpenCV 加载彩色图像时,蓝色通道是第一个,绿色通道是第二个,红色通道是第三个。
首先,使用cv2.imread()函数读取图像。图像应该在工作目录中,或者应该提供图片的完整路径。在本例中,读取sigonghuiye.jpeg图像并将其存储在img变量中:
img = cv2.imread('sigonghuiye.jpeg')
图像加载到img后,可以获得图像的一些属性。我们要从加载的图像中提取的第一个属性是shape,它将告诉我们行、列和通道的数量(如果图像是彩色的)。我们将此信息存储在dimensions变量中:
dimensions = img.shape
第二个属性是图像的大小(img.size=图像高度 × 图像宽度 × 图像通道数):
total_number_of_elements= img.size
第三个属性是图像数据类型,可以通过img.dtype获得。因为像素值在 [0-255] 范围内,所以图像数据类型是 uint8 (unsigned char):
image_dtype = img.dtype
上面示例中,我们已经使用了cv2.imshow()函数来在窗口中显示图像,这里我们对其进行更详细的介绍,使用 cv2.imshow() 函数显示图像时,窗口会自动适应图像大小。此函数的第一个参数是窗口名,第二个参数是要显示的图像。在这种情况下,由于加载的图像已存储在 img 变量中,因此使用此变量作为第二个参数:
cv2.imshow("original image", img)
显示图像后,我们来介绍下键盘绑定函数——cv2.waitKey(),它为任何键盘事件等待指定的毫秒数。参数是以毫秒为单位的时间。当执行到此函数时,程序将暂停执行,当按下任何键后,程序将继续执行。如果毫秒数为 0 (cv2.waitKey(0)),它将无限期地等待键盘敲击事件:
cv2.waitKey(0)
要访问(读取)某个像素值,我们需要向 img 变量(包含加载的图像)提供所需像素的行和列,例如,要获得处的像素值 :
(b, g, r) = img[6, 40]
我们在三个变量(b, g, r)中存储了三个像素值。请牢记 OpenCV 对彩色图像使用BGR格式。另外,我们可以一次仅访问一个通道。在本例中,我们将使用所需通道的行、列和索引进行索引。例如,要仅获取像素处的蓝色值:
b = img[6, 40, 0]
像素值也可以以相同的方式进行修改。例如,要将像素 (x=40, y=6) 处设置为红色:
img[6, 40] = (0, 0, 255)
有时,需要处理一个区域而不是一个像素。在这种情况下,应该提供一个范围(又名切片)的值,而不是单个值。例如,要获取图像的左上角:
top_left_corner = img[0:50, 0:50]
变量top_left_corner可以看做是另一个图像(比img小),但是我们可以用同样的方法处理它。
最后,如果想要关闭并释放所有窗口,需要使用cv2.destroyAllWindows()函数:
cv2.destroyAllWindows()
灰度图像访问和操作OpenCV中的像素
灰度图像只有一个通道。因此,在处理这些图像时会引入一些差异。我们将重点介绍这些差异,相同的部分不再赘述。
同样,我们将使用 cv2.imread() 函数来读取图像。在这种情况下,需要第二个参数,因为我们希望以灰度加载图像。第二个参数是一个标志位,指定读取图像的方式。以灰度加载图像所需的值是 cv2.IMREAD_grayscale:
gray_img = cv2.imread('logo.png', cv2.IMREAD_GRAYSCALE)
在这种情况下,我们将图像存储在gray_img变量中。如果我们打印图像的尺寸(使用 gray_img.shape ),只能得到两个值,即行和列。在灰度图像中,不提供通道信息:
dimensions = gray_img.shape
shape将以元组形式返回图像的维度 —— (828, 640)。
像素值可以通过行和列坐标访问。在灰度图像中,只能获得一个值(通常称为像素的强度)。例如,如果我们想获得像素处的像素强度:
i = gray_img[6, 40]
图像的像素值也可以以相同的方式修改。例如,如果要将像素处的值更改为黑色(强度等于0):
gray_img[6, 40] = 0
OpenCV图像处理基础小结
在本文中,首先介绍了与图像相关的关键概念。图像构成了构建计算机视觉项目所必需的丰富信息。然后,我们需要了解 OpenCV 使用 BGR 颜色格式而不是 RGB,但有一些 Python 包(例如 Matplotlib )使用后一种格式。因此,需要了解如何将图像从一种颜色格式转换为另一种颜色格式。
此外,总结了处理图像的主要功能和参数:
- 访问图像属性
- OpenCV 常用函数,例如 cv2.imread() 、 cv2.split() 、 cv2.merge() 、 cv2.imshow() 、 cv2.waitKey() 和 cv2.destroyAllWindows()
- 如何在 BGR 和灰度图像中获取和操作图像像素
系列链接
OpenCV-Python实战(2)——图像与视频文件的处理
OpenCV-Python实战(3)——OpenCV中绘制图形与文本
OpenCV-Python实战(4)——OpenCV常见图像处理技术
OpenCV-Python实战(5)——OpenCV图像运算
OpenCV-Python实战(6)——OpenCV中的色彩空间和色彩映射
OpenCV-Python实战(7)——直方图详解
OpenCV-Python实战(8)——直方图均衡化
OpenCV-Python实战(9)——OpenCV用于图像分割的阈值技术
OpenCV-Python实战(10)——OpenCV轮廓检测
OpenCV-Python实战(11)——OpenCV轮廓检测相关应用
OpenCV-Python实战(12)——一文详解AR增强现实
OpenCV-Python实战(13)——OpenCV与机器学习的碰撞
OpenCV-Python实战(14)——人脸检测详解
版权声明:本文为博主盼小辉丶原创文章,版权归属原作者,如果侵权,请联系我们删除!
原文链接:https://blog.csdn.net/LOVEmy134611/article/details/119489496