在这篇文章中,笔者将介绍一篇论文,论文提出了一种由法向量恢复深度的方法:论文为Surface-from-gradients: An approach based on discrete geometry processing
1.论文的动机与概况
SfS(surface from shading)和PS(photometric stereo)可以计算稠密带噪的法向量图(梯度场),通过积分可计算出深度图。数学上,由三维表面生成的梯度场是可积的,但实际上,由于噪声导致不可积。以前的处理方法中,有强制可积性约束(但会扰乱法向量),也有通过平滑表面来抑制噪声的,但它会把尖锐特征平滑掉。在本文中,通过离散化来避免可积性问题,提出新的表面重建思路。具体来说,重建的表面由一个包含很多面片(facet)的mesh模型M来计算,每个面片对应法向量图(梯度场)的一个样本。在将样本梯度转换到面片的法向量后,使用离散几何方法(DGP)对M进行变形,让其面片符合要求的法向量。M的变形通过迭代计算进行,在每次迭代中,先进行局部成型(local shaping),根据其法向量和当前形状决定其每个面片的位置和朝向。然后进行全局融合(global blending),将所有面片粘合在一起(其在局部成形后会破碎),使表面重新相连。融合在最小二乘优化框架下进行,可以高效求解。
该文章是首次运用DGP求解SfG(surface from gradients, 即surface from normal)问题,其优势有三方面:
1.保存尖锐特征:由于法向量仅在局部成形步骤里被强制在面片内,尖锐特征可以沿着面片边界构建。同时,表面平滑度由于全局渲染步骤的最小二乘优化而保存
2.应对梯度信息缺失:可应用缺失法向量信息的样本。缺失55%信息的样本也可成功重建
3.应对规则边界:由于将计算媒介转换到mesh的表面,具有一般形状边界的表面也可有效重建
局部整形与全局融合示意图: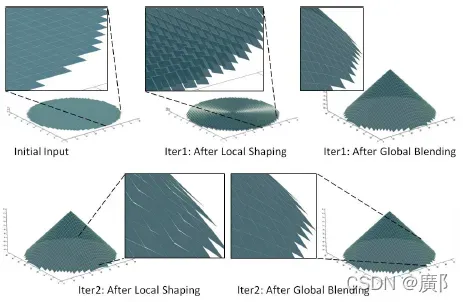
可以看到,整个算法的思路就是:每个像素就是一个面片,一开始M是一个平面,然后根据每个面片的法向量摆正面片的方向,最后把面片垒起来,不断迭代以获得最终结果。
2.论文的范式
首先,对于每个样本(i,j),为其构建一个四边形面片,面片的边界由四个顶点定义:
。
2.1 Local Shaping 局部成形
在局部整形步骤中,四边形面片的顶点被投影到一个平面上,假设法向量
通过当前面片
的中心
:

顶点沿z轴在法向量平面的投影(新的z坐标)由下式给出:

其中k的取值为{i,i+1},l的取值为{j,j+1},
具体来说,假设四个顶点投影后的深度为d,面片中心的深度为c,则:
其中h为设定的每个像素所代表的宽度
因为这个投影公式只是一个近似值,所以也可以通过下面的公式给出(论文里没有写,但是实验是可行的,感觉按照论文的示意图,下面的公式可能更合理?):
Local Shaping示意图: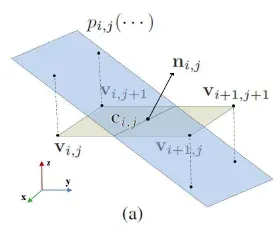
依笔者愚见,在顶点的下标中如果换为
可能更合理(即i对应x,j对应y,i+1对应x坐标增加)
上述示意图以第二种方式投影的坐标如下: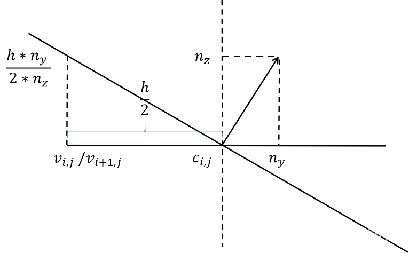
由四个面片包围的顶点会计算出4个投影坐标,如果我们简单对其求平均获得该顶点的投影坐标,结果会不尽如人意,因此我们需要更加复杂的全局融合。
2.2 Global Blending 全局融合
在全局融合步骤里,我们希望将M变形为这样一个形状:其所有面片以顶点位置所给出的形状与投影后的面片一样。具体来说,假设是由面片
各顶点深度组成的向量(这里的z应理解为经过global blending后的深度):

设投影后面片的顶点深度向量为,在最优形状M中,向量z和向量p应该表示一个相同形状的面片,这个目标可以表示为最小化下式:

通过最小化上式,可以获得mesh表面M,其表面法向量与目标最接近,然而该约束过强,实际上z和p仅被希望表示相同的形状。因此我们建立新的式子,通过对比它们(投影后的面片和global blending后的面片)以它们中心为参考的的相对向量(relative vector)。这个可以通过减去z和p的均值来实现。即我们定义这样一个矩阵: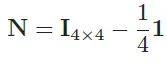
其中是单位矩阵,
是一个元素全为1的4×4矩阵
返回面片
以其中心为参考的相对向量,示意图如下,观察可知相对向量(4×1)是面片中心指向四个顶点的向量的z值的集合,可以表征面片的形状和朝向。
也一样。此时我们要优化的函数为:
 如下图所示,当z和p有相同形状和相同朝向时获得最小值。蓝色是当前facet用式(2)投影后的4个顶点构成的新facet,由于每个顶点在4个相邻的facet各自投影后都会获得新的高度值,因此黄色是每个顶点用某种策略(global blending)融合4个分别的投影后形成的顶点所构成的新的facet,我们不希望这两个facet顶点位置完全一样,这样约束太严格,我们希望的是黄色facet和蓝色facet的形状和朝向相同即可,因此2.3节方程组所求的深度x就是黄色facet的顶点深度,方程组的思想是,先局部投影,然后再全局求解,让全部面片的融合深度值整体最优
如下图所示,当z和p有相同形状和相同朝向时获得最小值。蓝色是当前facet用式(2)投影后的4个顶点构成的新facet,由于每个顶点在4个相邻的facet各自投影后都会获得新的高度值,因此黄色是每个顶点用某种策略(global blending)融合4个分别的投影后形成的顶点所构成的新的facet,我们不希望这两个facet顶点位置完全一样,这样约束太严格,我们希望的是黄色facet和蓝色facet的形状和朝向相同即可,因此2.3节方程组所求的深度x就是黄色facet的顶点深度,方程组的思想是,先局部投影,然后再全局求解,让全部面片的融合深度值整体最优
最后通过四个顶点的平均得到patch中心的深度值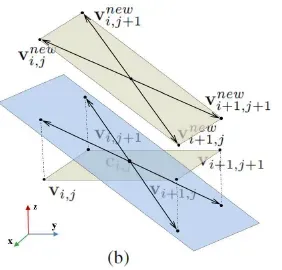
2.3数学方案
上述优化问题可以改写为:
我们假设待重建表面有n个顶点,m个面片,其中,A是一个大小为4mxn的稀疏矩阵,x为待求解的global blending后每个顶点的深度,b为投影后面片的各个顶点的相对向量的各个值排列得到的列向量。Ax的结果为global blending后的面片各个顶点的相对向量的各个值排列得到的列向量。因此A在每次迭代中都是一样的,可以提前构造,b需要在每次迭代中更新。
在代码中,我们可以分4个mxn矩阵来构造A,第i个mxn矩阵填充的是论文中N的第i行数据与z()(这里的
是global blending后的
)相乘的结果,这个矩阵每行会有四个值(N每行那几个), 每行代表一个面片, 这四个值存放列的列索引对应当前行的面片的四个顶点的索引,因此它与x相乘后得到一个所有facet的relative vector的第i个值排列得到的列向量, 与之相对应的b应为N的第i行与p(
)的所有facet顶点相乘得到的relative vector的第i个值排列得到的列向量
这样一个基本的最小二乘问题可以通过以下方式解决:
如果上式写成
我们可以先对进行Cholesky因式分解(一个实对称正定矩阵
可以分解为两个下三角矩阵的乘积
),因此在每次迭代中,我们只需要这样计算x的值:
2.4异常处理
当法向量确定的平面与xoy平面接近垂直时,局部成形会变得不稳定(待投影的平面过于垂直),这时做一个异常检测,当,作者使用
,这时表面角度小于5°,这些法向量定义为离群值,这时,将
的法向量用作
的法向量,即法向量不变,或者说面片不变形。
在代码中如何更新离群面片的法向量呢,在获得与其对应的global blending后的面片后,由于这个面片被四个顶点所定义,这时的面片已经未必是平面四边形,即四点未必共面,我们利用三点确定一个平面(或由两个向量确定),构建两组平面(两组三点),在其中一组中,求解一个不满秩的方程组得通解:
但如果碰上使用的计算包不能计算这种方程组(如scipy和numpy就不行),我们可以转化为特征值的计算,可以证明特征值为0对应的特征向量就是上式的通解。
3.代码
代码我放在了GitHub上:看着代码应该可以更好理解这篇文章的思想,Click me
本文的扩展工作:
3D Surface Detail Enhancement From a Single Normal Map
Surface Reconstruction From Normals: A Robust DGP-Based Discontinuity Preservation Approach
Surface Reconstruction with Unconnected Normal Maps: An Efficient Mesh-based Approach
最后就以小bunny结束这篇文章吧。
版权声明:本文为博主廣阝原创文章,版权归属原作者,如果侵权,请联系我们删除!
原文链接:https://blog.csdn.net/SZU_Kwong/article/details/123013606