关于SLAM(simultaneous localization and mapping)问题一个很粗糙的总结。
对于SLAM的发展历程,Leonard和Reid大佬将SLAM到目前为止的发展过程总结为三个阶段:
- classical age(1986-2004):早期阶段,SLAM问题的定义、基于概率框架的建模和求解方法;
- algorithm-analysis age(2004-2015):深入研究SLAM问题的一些性质,比如稀疏性、收敛性、一致性等,更多样、更高效的算法也被相继提出;
- robust-perception age(2015-):开始考虑算法的鲁棒性、可扩展性、资源约束下的高效算法、高层语义认知任务导向等;
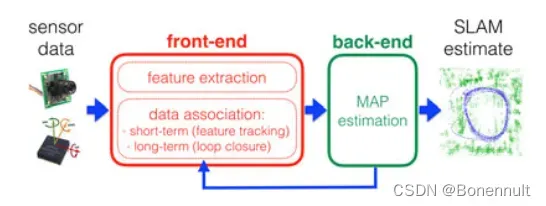
SALM系统主要包括前端和后端两部分,前端负责从传感器数据中提取特征、data association(如特征提取、回环检测)等,后端负责最大后验估计、滤波等;
根据感知方式,可分为几类:
- 测距和角度测量:毫米波雷达、声纳等传感器;
- 视觉相机:各种相机,比如RGB-D相机等;需要从图像中提取特征点,例如SIFT等;纯视觉导航有专门的研究方向,即VO(Visual Odometry),VO+全局地图优化(例如回环检测)=visual SLAM;
- 激光雷达;
- 惯性导航:IMU,配合视觉传感器可以实现VIO;
根据地图结构,可以分为几类(地图结构与感知手段密切相关):
- 基于landmarkd的,传感器通常是测距测角的,或者视觉中提取特征点;
- 栅格地图(2D)、点云地图(3D),主要是激光雷达;
- 基于边/表面的几何地图;
按解法可分为几类:
- 基于贝叶斯框架递归滤波的:如EKF、PF、Information Filter等;
- 基于优化的:一种是光束平差法(用于视觉,实际上是最小二乘);另一种是图优化(graph SLAM,实际上就是概率图模型,似乎是现在的主流);
- Set Membership 类的方法、以及定性方法等;
需要考虑的科学问题包括:
- 地图构建和机器人位姿估计,因此实际上是参数估计/求解问题;
- 多传感器数据融合,与现有地图信息融合;
- 环回检测以纠正累积错误;
- 降低复杂度,比如每次只更新map和state的相关部分,而不是一起更新所有参数;
- 数据关联;

除了基本的SLAM问题,还有一些发展方向:
- Active SLAM:同时考虑机器人的运动控制,与exploration-exploitation问题相关;
- 多机SLAM,相比于单机需要考虑的问题:
- 多机协作的架构:集中式(online or offline?)、分布式;
- 相邻机器之间的数据交互,防止数据伦理问题,即一个数据在多台机器上重复使用多次;
- 每台机器的地图更新方法;
- 数据关联问题;
- 通信负载、数据压缩、地图结构优化等;
终于给我的博客做广告了,欢迎
https://glooow1024.github.io/
https://glooow.gitee.io/
Reference
- Dissanayake, MWM Gamini, et al. “A solution to the simultaneous localization and map building (SLAM) problem.”
IEEE Transactions on robotics and automation
17.3 (2001): 229-241. - Durrant-Whyte, Hugh, and Tim Bailey. “Simultaneous localization and mapping: part I.”
IEEE robotics & automation magazine
13.2 (2006): 99-110. - Bailey, Tim, and Hugh Durrant-Whyte. “Simultaneous localization and mapping (SLAM): Part II.”
IEEE robotics & automation magazine
13.3 (2006): 108-117. - Bresson, Guillaume, et al. “Simultaneous localization and mapping: A survey of current trends in autonomous driving.”
IEEE Transactions on Intelligent Vehicles
2.3 (2017): 194-220. - Taketomi, Takafumi, Hideaki Uchiyama, and Sei Ikeda. “Visual SLAM algorithms: A survey from 2010 to 2016.”
IPSJ Transactions on Computer Vision and Applications
9.1 (2017): 1-11. - Cadena, Cesar, et al. “Past, present, and future of simultaneous localization and mapping: Toward the robust-perception age.”
IEEE Transactions on robotics
32.6 (2016): 1309-1332.
版权声明:本文为博主Bonennult原创文章,版权归属原作者,如果侵权,请联系我们删除!
原文链接:https://blog.csdn.net/weixin_41024483/article/details/123226544