


目录
(一)Matlab中的LMI处理工具包
matlab中有专门求解线性矩阵不等式的工具包YALMIP,可以在官网上下载安装,可参考yalmip安装教程。yalmip只提供了一些基本的LMI求解方法,有更复杂的不等式求解需求可以再安装cplex工具包。关于怎么使用yalmip工具包可参考yalmip代码编写教程和LMI工具箱教程,教程文档。MONSK安装
(二)为什么LMI成为控制理论领域重要工具?
线性矩阵不等式(LMI)技术是分析和综合控制系统的重要工具,尤其是鲁棒控制领域,主要因素有以下三个[1]:
- 对于经典的控制方法,LMI技术的优点就是操作简单。在LMI技术出现以前,人们通过求解Ricaati方程来设计最优控制器,但是Ricaati方程求解很难。而LMI技术仅需少量的概念和基本原理就能开发出实用的工具(现在我们用YALMIP工具包就能很方便的求解LMI问题)。
- LMI技术提供了控制问题的广泛前景,包括鲁棒性分析,标称H∞,H2和鲁棒控制综合,多目标综合,线性参数变化综合,其中一些无法在古典控制领域中解决处理。
- LMI技术是利用凸优化的强有效的数值工具,并在理论体系上附加上有效的软件工具。
(三)LMI在与Lyapunov不等式的关系
(1)线性矩阵不等式
考虑线性矩阵不等式表达如下[2]:
![]()

上式中 ,
![]()




在许多系统与控制问题中,问题的变量以矩阵的形式出现,如Lyapunov矩阵不等式:
![]()

其中,矩阵![]()
![]()


![]()

因此有:
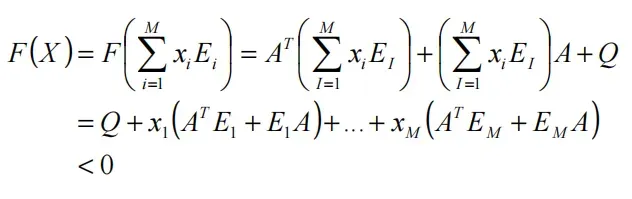

通过这种转化,就得到了一个更为一般的线性矩阵不等式的表达方式。
(2)线性矩阵不等式系统
假设存在多个矩阵不等式:
![]()

总体构成称线性矩阵不等式系统。引进



(3)舒尔(Schur)补
在许多一些非线性矩阵不等式转化成线性矩阵不等式的问题中,我们常常用到矩阵的Schur补性质。考虑一个矩阵![]()

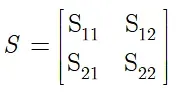

其中![]()



引理1 Schur补性质
对给定的对称矩阵:
其中
是 维的。以下3个条件是等价的: (1)
(2)
(3)
(证明方法可参考 俞立的《鲁棒控制——线性矩阵不等式处理方法》 p8页)



在一些控制问题中,经常遇到二次型矩阵不等式[3]:
![]()

其中


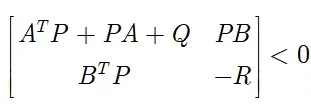

的可行性问题,而后者是一个关于矩阵变量P的线性矩阵不等式。
因此在控制问题中,我们经常要设计Lyapunov函数V(t),并为了保证系统稳定性要求

(四)LMI中常见引理
引理2(广义KYP引理[4])
给定矩阵
, 以及 , ,且 代表 的零空间,其中 ,则不等式
成立,当且仅当存在对称矩阵
以及 ,使得 成立,其中
其中*表示矩阵的共轭转置,j是虚数单位,
表示右克罗内克积,即
推论1(广义KYP引理推论[4])
针对线性系统
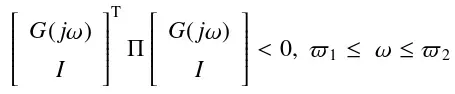
, 为系统由扰动到控制输出的传递函数,则对于给定的对称矩阵 ,下面两个陈述是等价的: 1)有限频域不等式
成立。
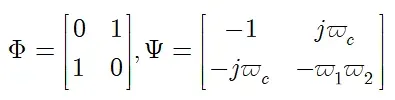
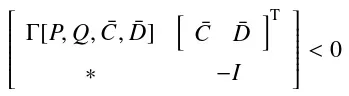
2)存在对称矩阵Р和Q满足Q>0,使得
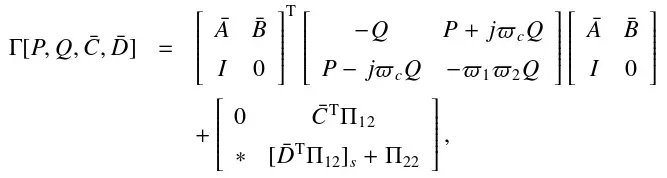
成立,其中
且
表示矩阵 的右上块和右下块,矩阵中*表示其对应块的转置。



















引理3(射影定理[1])
对于给定的标量
,矩阵 满足 ,当且仅当下面两个条件成立:



引理3(反射影定理[1]):
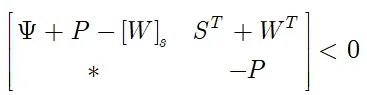
是给定的正定对称矩阵,不等式 等价于下面的线性矩阵不等式(LMI)求解问题:
式中符号
用以表示矩阵 与其转置的加和,即 。





引理4 (Jensen不等式[5,6]
对于任意正定对称常数矩阵
,标量 满足 ,并且存在一个向量 ,那么以下不等式成立:






引理5 (Finsler’s引理[7]):
令
, ,以及 满足H的秩小于n,rank(H) = r <n.则下列两式等价:




参考文献
【1】Apkarian P,Tuan H D,Bernussou J.Continuous-Time analysis,eigenstructure as-signment,and H2synthesis with enhanced Linear Matrix Inequalities(LMI)char-acterizations[J].IEEE Transactions on Automatic Control,2001,42(12):1941–1946.
【2】《鲁棒控制理论及应用》王娟 张涛 徐国凯
【3】《鲁棒控制——线性矩阵不等式处理方法》俞立
【4】Iwasaki T,Hara S.Generalized KYP Lemma:unified frequency domain inequal-ities with design applications[J].IEEE Transactions on Automatic Control,2005,50(1):41–59.
【5】Wu J,Chen X,Gao H.H∞filtering with stochastic sampling[J].Signal Proces-siong,2010,90(4):1131–1145.
【6】Gao H,Wu J,Shi P.Robust sampled-data H∞control with stochastic sampling[J].Automatica,2009,45(7):1729–1736.
【7】Qiu J,Feng G,Yang J.New results on robust energy-to-peakfiltering for discrete-time switched polytopic linear systems with time-varying delay[J].IET ControlTheory and Applications,2008,2(9):795–806.
·
版权声明:本文为博主作者:啵啵鱼爱吃小猫咪原创文章,版权归属原作者,如果侵权,请联系我们删除!
原文链接:https://blog.csdn.net/bulletstart/article/details/132832314