


动态规划算法(DP):在马尔可夫决策过程(MDP)的完美环境模型下计算最优策略。但其在强化学习中实用性有限,其一是它是基于环境模型已知;其二是它的计算成本很大。但它在理论伤仍然很重要,其他的一些算法与动态规划算法(DP)十分相似,只是计算量小及没有假设环境模型已知。
动态规划算法(DP)和一般的强化学习算法的关键思想都是基于价值函数对策略的搜索,如前所述,一旦我们找到满足贝尔曼最优方程的最优价值函数



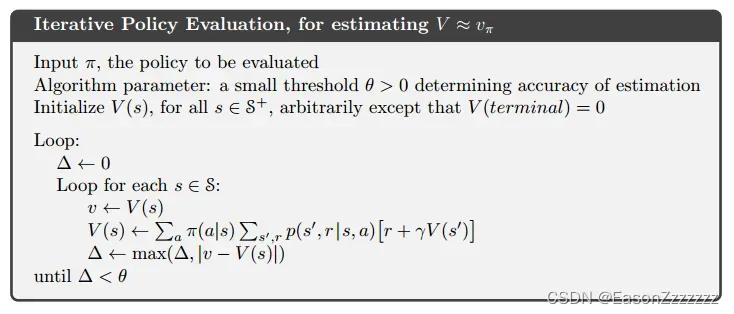
1、策略评估(预测)
首先,我们考虑如何计算任意策略



其中,




如果环境动态模型完全已知,那么上述方程可通过迭代计算来求解,即

显然



为了使


若要编写程序实现上述的迭代策略评估,必须使用两个数组,一个储存旧价值



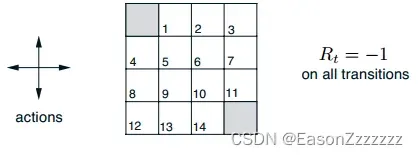
1.1、案例网格世界

1.2、代码
import numpy as np
world_size = 4 # 网格为4*4
a_position = [0, 0]
b_position = [world_size - 1, world_size - 1]
actions = [
np.array([0, -1]), # 左
np.array([-1, 0]), # 上
np.array([0, 1]), # 右
np.array([1, 0]) # 下
]
action_prob = 0.25
def step(state, action):
"""
:param state: 当前状态,坐标的list,比如[1,1]
:param action: 当前采取的动作
:return: 下一个状态(坐标的list)和reward
"""
if state == a_position:
return a_position, 0
if state == b_position:
return b_position, 0
next_position = (np.array(state) + action).tolist()
x, y = next_position
# 判断是否出界
if x < 0 or x >= world_size or y < 0 or y >= world_size:
reward = - 1.0
next_position = state
else:
reward = - 1.0
return next_position, reward
def grid_world_value_function():
value = np.zeros((world_size, world_size))
episode = 0
while True:
episode += 1
# 每轮迭代都会产生一个new_value,直到new_value和value很接近即收敛为止
new_value = np.zeros_like(value)
for i in range(world_size):
for j in range(world_size):
for action in actions:
(next_i, next_j), reward = step([i, j], action)
new_value[i, j] += action_prob * (reward + value[next_i, next_j])
error = np.sum(np.abs(new_value - value))
if error < 1e-4:
break
value = new_value
return value
if __name__ == '__main__':
value1 = grid_world_value_function()
print(value1)
1.3、结果展示
[[ 0. -13.99990421 -19.99985806 -21.99984116]
[-13.99990421 -17.99987496 -19.99985901 -19.99985806]
[-19.99985806 -19.99985901 -17.99987496 -13.99990421]
[-21.99984116 -19.99985806 -13.99990421 0. ]]
2、策略改进
我们计算策略的价值函数的原因是为了找到更好的策略,假设我们已经知道某策略

关键在于它是大于还是小于

假设



到目前为止,在给定策略及其价值函数的条件下,我可以轻松地在单个状态下对动作的更改,我们将其延伸至所有状态下动作的更改,即在每个状态下根据


贪心策略采取的是在短期内看起来最好的动作,可以看出它优于原策略。根据原策略的价值函数通过贪心方法改进原策略,从而得到新策略,我们称其为策略改进。
到目前为止,我考虑的是确定性策略这种特殊情况,事实上,上述所有思想可以很容易地扩展到随机策略。
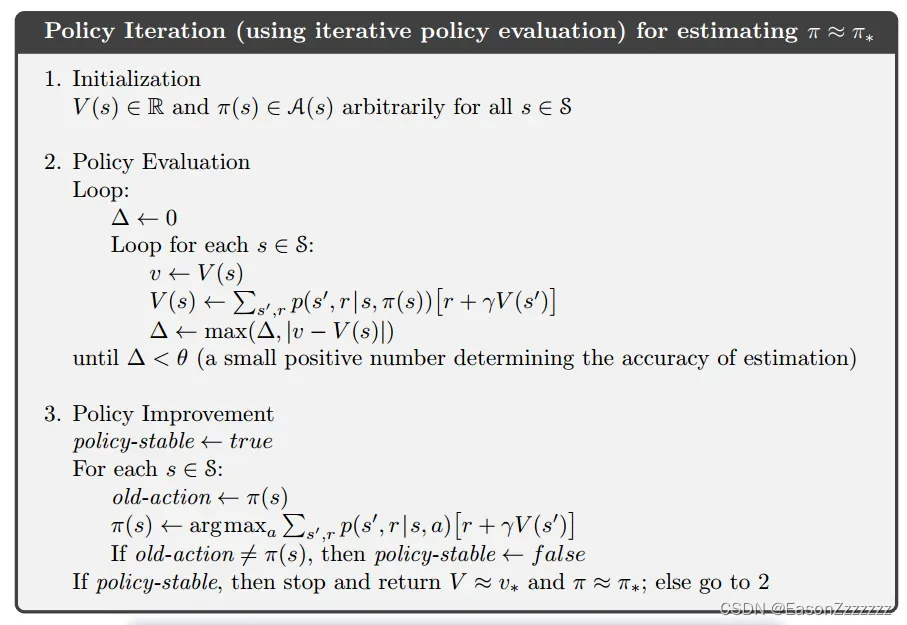
3、策略迭代
一旦通过价值函数



其中


这种寻找最优策略的方法被称为策略迭代,完整算法如下所示,可以看出每次策略评估本身就是一次迭代计算,都是从前一个策略的价值函数开始,这通常会使得策略评估的收敛速度大大提高。

3.1 杰克的租车公司
杰克为一家汽车租赁公司管理两家分店,每家分店每天都有客户租车。租出一辆车,杰克就获得 10 美元,为了确保每家分店有车可用,杰克需连夜在两家店来回移动汽车,移动一次的成本为 2 美元,我们假设每个分店租车和还车的数量服从泊松分布






3.2、分析
- 状态空间:两家门店,每家门店最多有 20 辆车供租赁
- 动作空间:每天下班最多转移 5 辆车
- 即时奖励:每租出 1 辆车奖励 10 美元
- 状态转移概率:租和还服从泊松分布
- 折扣系数:



3.3、代码实现
(1)状态转移矩阵
对于门店






def trans_prob(s, loc):
"""
:param s: 初始车辆数
:param loc: 租赁点位置 0:租赁点A 1:租赁点B
:return:
"""
for r in range(0, max_car_num + 1):
p_r = poisson(r, rental_lambada[loc]) # 租出去r辆车的概率
if p_r < accurate: # 精度限制
return
rent = min(s, r) # 租车数不可能大于库存数
reward[loc, s] += p_r * rental_income * rent # 租车收益
for c in range(0, max_car_num + 1): # 当天还车数量ret
p_c = poisson(c, rental_lambada[loc]) # 还c辆车的概率
if p_c < accurate: # 精度限制
continue
s_next = min(s - rent + c, max_car_num) # 下一步状态:租车+还车后的租车点汽车数量
Tp[loc, s, s_next] += p_c * p_r # 状态转移概率
(2)策略评估
根据给定的策略

# 进行策略评估
while True:
old_value = value.copy()
# 遍历所有状态
for i in range(max_car_num + 1):
for j in range(max_car_num + 1):
new_state_value = value_update([i, j], policy[i, j], value)
value[i, j] = new_state_value
max_value_change = abs(old_value - value).max()
print(f'max value change: {max_value_change}')
if max_value_change < 0.1:
break
def value_update(state, action, last_value):
"""
更新当前状态的价值函数
:param state: [i,j] i代表第一个租赁点的汽车数量,j代表第二个租赁点的汽车数量
:param action: 动作
:param last_value: 上一个价值函数
:return: 当前状态的价值函数
"""
# 移车之后状态从state变成new_state
temp_v = -np.abs(action) * move_cost # 移车代价
for m in range(0, max_car_num + 1):
for n in range(0, max_car_num + 1): # 对所有后继状态
# temp_V 即是所求期望
# Tp[0,i,j]表示第一个租赁点状态从i到j的概率
# Tp[1,i,j]表示第二个租赁点状态从i到j的概率
temp_v += Tp[0, new_state[0], m] * Tp[1, new_state[1], n] * (
reward[0, new_state[0]] + reward[1, new_state[1]] + discount * last_value[m, n])
return temp_v
(3)策略改进
在当前策略基础上,贪婪地选取行为,使得后继状态价值增加最多;
具体方法为在当前状态下,遍历动作空间,分别计算出每个动作的价值函数,最大的价值函数,即是贪婪的要选取的策略。
# 策略改进
# 当前状态[i,j]
old_action = policy[i, j]
action_value = []
# 遍历动作空间
for action in actions:
if -j <= action <= i: # valid action
action_value.append(value_update([i, j], action, value))
else:
action_value.append(-np.inf)
action_value = np.array(action_value)
# 贪婪选择,选择价值函数最大的动作
new_action = actions[np.wheron_value == action_value.max())[0]]
policy[i, j] = np.random.choice(new_action)
(4)策略迭代
在当前策略上迭代计算

if policy_stable and (old_action not in new_action):
policy_stable = False
(5)完整代码
import numpy as np
import math
import matplotlib.pyplot as plt
max_car_num = 20
max_move_num = 5
rental_lambada = [3, 4]
return_lambda = [3, 2]
discount = 0.9
rental_income = 10
move_cost = 2
accurate = 1e-6
Tp = np.zeros(2 * 21 * 21).reshape(2, 21, 21) # 状态转移概率矩阵,Tp[0,i,j]表示第一个租赁点状态从i到j的概率
reward = np.zeros(2 * 21).reshape(2, 21) # 一步收益,2个地点,21个状态
def poisson(n, lamb):
"""
计算泊松分布的概率
:param lamb: 泊松分布常数 λ
:param n: 泊松分布输入:整数 n
:return: 泊松分布输出:p(x=n),即x=n发生的概率
"""
return np.exp(-lamb) * (lamb ** n) / math.factorial(n)
def trans_prob(s, loc):
"""
:param s: 初始车辆数
:param loc: 租赁点位置 0:租赁点A 1:租赁点B
:return:
"""
for r in range(0, max_car_num + 1):
p_r = poisson(r, rental_lambada[loc]) # 租出去r辆车的概率
if p_r < accurate: # 精度限制
return
rent = min(s, r) # 租车数不可能大于库存数
reward[loc, s] += p_r * rental_income * rent # 租车收益
for c in range(0, max_car_num + 1): # 当天还车数量ret
p_c = poisson(c, rental_lambada[loc]) # 还c辆车的概率
if p_c < accurate: # 精度限制
continue
s_next = min(s - rent + c, max_car_num) # 下一步状态:租车+还车后的租车点汽车数量
Tp[loc, s, s_next] += p_c * p_r # 状态转移概率
def value_update(state, action, last_value):
"""
更新当前状态的价值函数
:param state: [i,j] i代表门店A的汽车数量,j代表门店B的汽车数量
:param action: 动作
:param last_value: 上一个价值函数
:return: 当前状态的价值函数
"""
if action > state[0]:
action = state[0] # 从门店A移走的车数不可能大于库存
elif action < 0 and -action > state[1]:
action = -state[1] # 从门店B移走的车数不可能大于库存
# 移车之后状态从state变成new_state
new_state = [state[0] - action, state[1] + action]
new_state[0] = min(new_state[0], max_car_num)
new_state[1] = min(new_state[1], max_car_num)
temp_v = -np.abs(action) * move_cost # 移车代价
for m in range(0, max_car_num + 1):
for n in range(0, max_car_num + 1): # 对所有后继状态(m,n)
# temp_V 即是所求期望
# Tp[0,i,j]表示第一个租赁点状态从i到j的概率
# Tp[1,i,j]表示第二个租赁点状态从i到j的概率
temp_v += Tp[0, new_state[0], m] * Tp[1, new_state[1], n] * (
reward[0, new_state[0]] + reward[1, new_state[1]] + discount * last_value[m, n])
return temp_v
def draw_fig(value, policy, iteration):
"""
绘图
:param value: 价值函数
:param policy: 策略
:param iteration: 迭代次数
:return:
"""
fig = plt.figure(figsize=(15, 15))
ax = fig.add_subplot(121)
ax.matshow(policy, cmap=plt.cm.bwr, vmin=-max_move_num, vmax=max_move_num)
ax.set_xticks(range(max_car_num + 1))
ax.set_yticks(range(max_car_num + 1))
ax.invert_yaxis()
ax.xaxis.set_ticks_position('bottom')
ax.yaxis.set_ticks_position('none')
ax.set_xlabel("Cars at second location")
ax.set_ylabel("Cars at first location")
for x in range(max_car_num + 1):
for y in range(max_car_num + 1):
ax.text(x=x, y=y, s=int(policy.T[x, y]), va='center', ha='center', fontsize=8)
ax.set_title(r'$\pi_{}$'.format(iteration), fontsize=20)
y, x = np.meshgrid(range(max_car_num + 1), range(max_car_num + 1))
ax = fig.add_subplot(122, projection='3d')
ax.scatter3D(y, x, value.T)
ax.set_xlim3d(0, max_car_num)
ax.set_ylim3d(0, max_car_num)
ax.set_xlabel("Cars at second location")
ax.set_ylabel("Cars at first location")
ax.set_title('value for ' + r'$\pi_{}$'.format(iteration), fontsize=20)
plt.savefig(f'./4_policy_iteration_result/{iteration}.png', bbox_inches='tight') # f'./result/{iteration}.png', bbox_inches='tight'
if __name__ == '__main__':
actions = np.arange(-max_move_num, max_move_num + 1) # 动作空间
value = np.zeros((max_car_num + 1, max_car_num + 1)) # 价值函数
policy = np.zeros(value.shape, dtype=int) # 策略
# 初始化状态转移概率矩阵
for i in range(0, max_car_num + 1):
trans_prob(i, 0)
trans_prob(i, 1)
# 策略迭代
iteration = 0
while True:
# 进行策略评估
while True:
old_value = value.copy()
# 遍历所有状态
for i in range(max_car_num + 1):
for j in range(max_car_num + 1):
new_state_value = value_update([i, j], policy[i, j], value)
value[i, j] = new_state_value
max_value_change = abs(old_value - value).max()
print(f'max value change: {max_value_change}')
if max_value_change < 0.1:
break
# 策略改进
policy_stable = True
for i in range(max_car_num + 1):
for j in range(max_car_num + 1):
old_action = policy[i, j]
action_value = []
# 遍历动作空间
for action in actions:
if -j <= action <= i: # valid action
action_value.append(value_update([i, j], action, value))
else:
action_value.append(-np.inf)
action_value = np.array(action_value)
# 贪婪选择,选择价值函数最大的动作
new_action = actions[np.where(action_value == action_value.max())[0]]
policy[i, j] = np.random.choice(new_action)
if policy_stable and (old_action not in new_action):
policy_stable = False
iteration += 1
print('iteration: {}, policy stable {}'.format(iteration, policy_stable))
draw_fig(value, policy, iteration)
if policy_stable:
break
3.4、运行结果
第一次策略迭代:
第二次策略迭代:
第三次策略迭代:
第四次策略迭代:
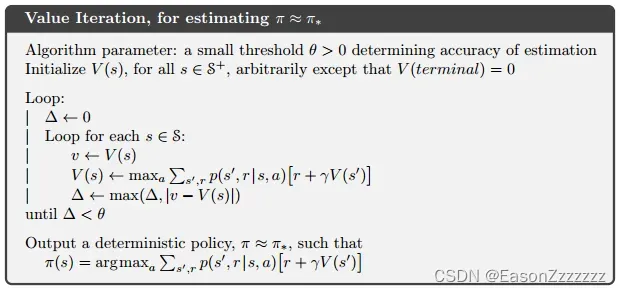
4、值迭代
策略迭代的一个缺点是:它得每次迭代都要进行策略评估,这本身就是一个冗长的迭代计算,而策略评估只有在极限的情况下才收敛到

对于任意的


版权声明:本文为博主作者:EasonZzzzzzz原创文章,版权归属原作者,如果侵权,请联系我们删除!
原文链接:https://blog.csdn.net/m0_72748751/article/details/135719690