


传送门
- 何为跟踪微分器(TD)
- 线性跟踪微分器(LTD)数学描述
- 非线性跟踪微分器(NTD)数学描述
何为跟踪微分器(TD)
跟踪微分器顾名思义,包含了跟踪和微分两个部分。
- 跟踪 t
就是一个对输入信号以某种手段延迟输出的环节 。
在做一些控制时,通常不希望输入信号出现阶跃的情况,这会在系统中产生一定扰动,因此通常会用一种 ” 斜坡算法 “使输入信号变得更平缓。这在变化的输入信号中体现出平滑滞后的效果,看起来像是经过这一 “斜坡算法” 的输出信号在跟踪输入信号。
- 微分 d
微分是指跟踪信号微分后的信号,代表着跟踪信号的变化率。
微分可以理解成变化速度,当我们想要快速精准到达目标信号时,既要保证快速,也要保证精准。而这两者通常是相悖的,快速往往伴随着超调(刹不住车)。因此如果能把握好速度的快慢,在离得远时加速,在快要到达时减速,就可以避免刹不住车的情况。
线性跟踪微分器(LTD)数学描述
- 建立线性状态方程,其中状态变量为
在自动控制理论中,常见的LTD是临界阻尼的二阶惯性环节, 其传递函数表示为
其中
将输入信号
又
又
整理后,得到
到这里大多数文章就没有后续的描述了,但其实我在学习到这部分的时候就有一个疑问,这个参数$r$的数学意义是什么,该怎么选取这个参数的数值呢,它又是如何影响着LTD的性能。后面的这部分内容是对参数r的讨论,感兴趣的可以往下看,反之则可以直接跳过。

通过微分方程
的形式,以单位阶跃响应为例, ,观察 随时间变化的过程,观察其达到1时的时间以及参数 在这个过程发挥的作用。
由于是关于时间的信号,为了避免误解,令 ,前者的t是信号,后者的t是时间。则将上述微分方程整理后得到:
开始求解微分方程 (悄悄拿出高数课本)
这里不赘述,直接给结论。
其中跟0时刻状态有关,不进行讨论。
我们只需要关注当是 的值,用于衡量跟踪性能。
显然,是衰减因子, 越大, 收敛的越快。

非线性跟踪微分器(NTD)数学描述
- 对比LTD,NTD采用的不是线性二阶惯性环节,而是特殊的非线性函数(最速控制综合函数),以实现跟踪的目的。
连续系统的最速控制综合函数的数学描述为
其中
这个最速控制综合函数
是基于物理公式得到的,假设当前速度为 ,以固定的加速度 运动,位移了 后速度为 ,则满足公式:
所以中的第二项 是减速到0的位移,第一项 是到达目标位置的位移。
通过比较这两个位移项的和,来决定当前是否加减速。
在simulink实现NTD,再观察状态变量的变化过程。



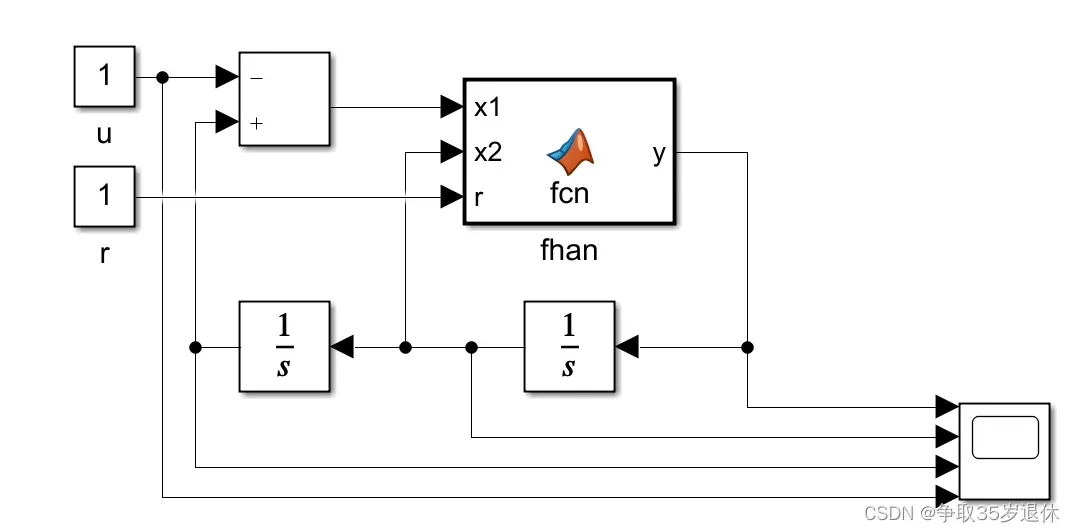
function y = fcn(x1,x2,r)
y = -r*sign(x1+x2*abs(x2)/(2*r));
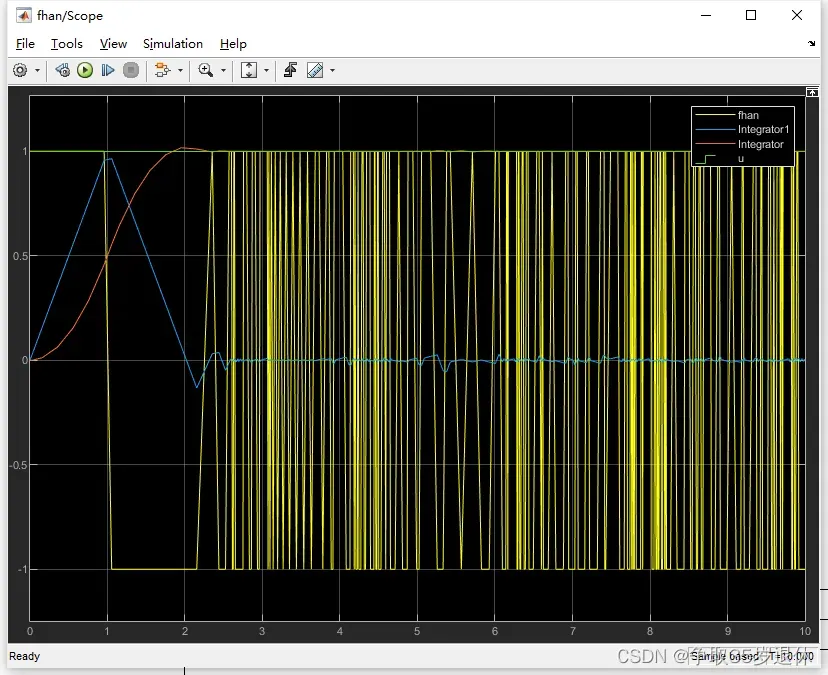
示波器结果为:

版权声明:本文为博主作者:争取35岁退休原创文章,版权归属原作者,如果侵权,请联系我们删除!
原文链接:https://blog.csdn.net/m0_37835056/article/details/130536224