


Diffusion Model(扩散模型 )对标的是生成对抗网络(GAN),只要GAN能干的事它基本都能干。之前用GAN网络来实现一些图片生成任务其实效果并不是很理想,而且往往训练很不稳定。但是换成Diffusion Model后生成的图片则非常逼真,也明显感觉到每一轮训练的结果相比之前都更加优异,也即训练更加稳定。
本文将用通俗的语言和公式为大家介绍Diffusion Model,并且结合公式为大家梳理Diffusion Model的代码,探究其是如何通过代码实现的。
整体思路
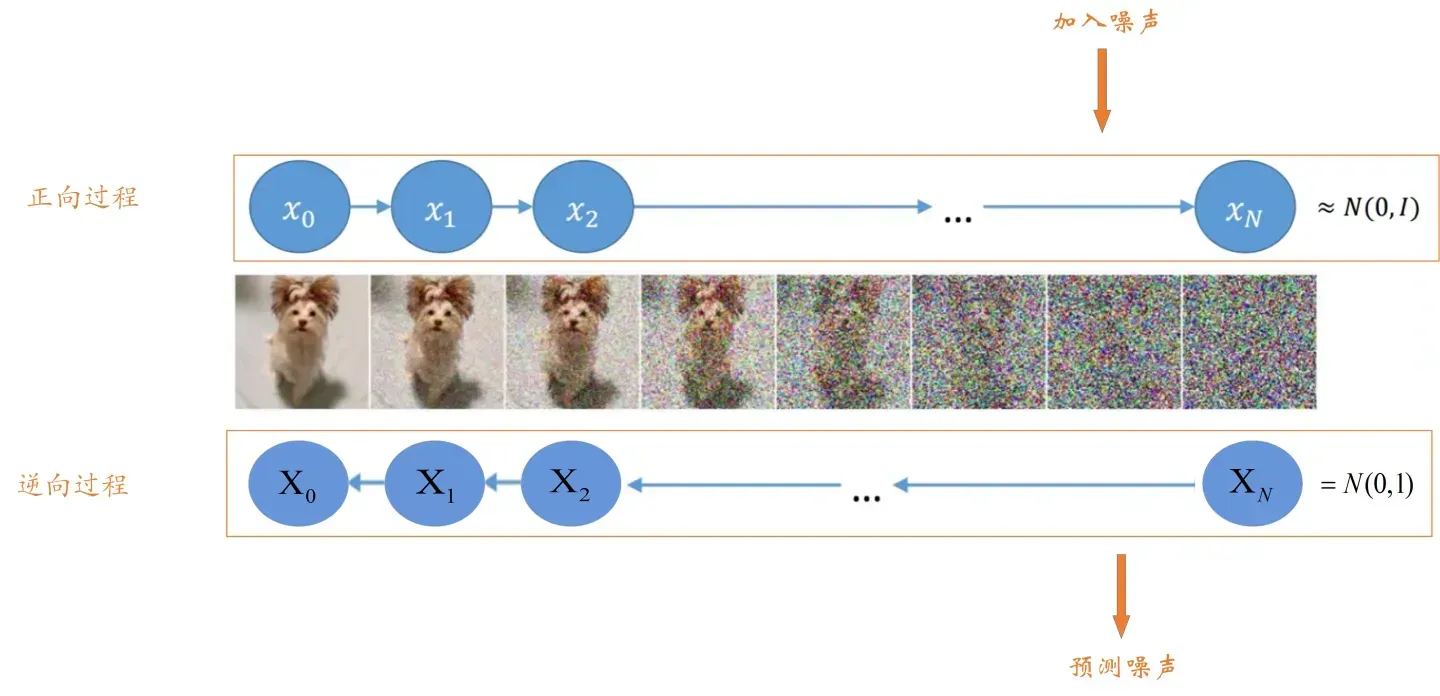
Diffusion Model的整体思路如下图所示:
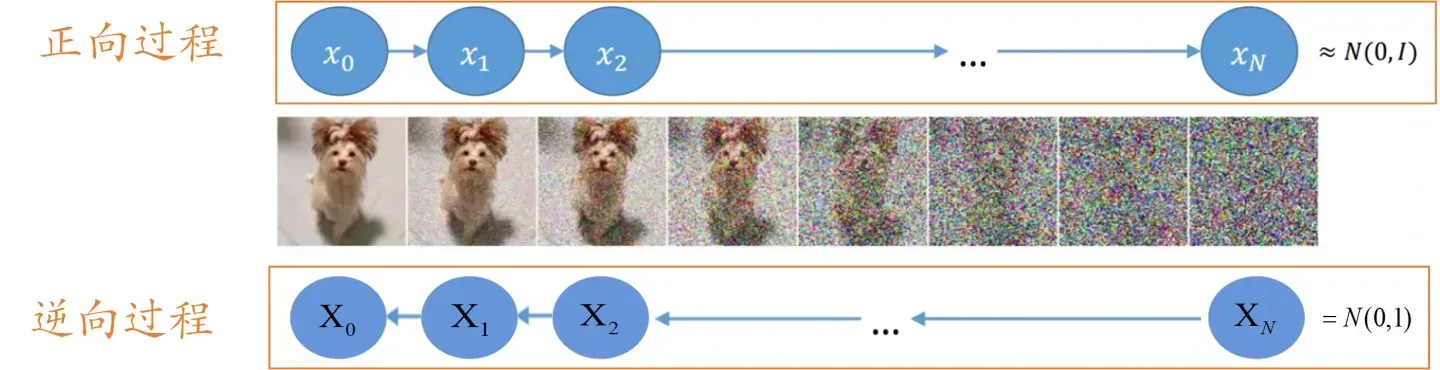

其主要分为正向过程和逆向过程,正向过程类似于编码,逆向过程类似于解码。
- 正向过程
首先,对于一张原始图片 - 逆向过程
首先,我们会随机生成一个服从高斯分布的噪声图片,然后一步一步的减少噪声直到生成预期图片。逆向过程大家先有这样的一个认识就好,具体细节稍后介绍。


实施细节
这一部分为大家介绍一下Diffusion Model正向过程和逆向过程的细节,主要通过推导一些公式来表示加噪前后图像间的关系。
正向过程
在整体思路部分我们已经知道了正向过程其实就是一个不断加噪的过程,于是我们考虑能不能用一些公式表示出加噪前后图像的关系呢。我想让大家先思考一下后一时刻的图像受哪些因素影响呢,更具体的说,比如



其中,后一时刻的图像由前一时刻图像和噪声决定相符合。这个公式前面的







我想你已经明白了公式1,但是你可能对



其中,
现在,我们已经得到了



这个公式就是公式1的一个类推公式,此时我们将公式3代入公式1中得:

这个公式4大家能理解吗? 我觉得大家应该对最后一个等式存在疑惑,也即



这下对于公式4的内容都明白了叭。注意这里的



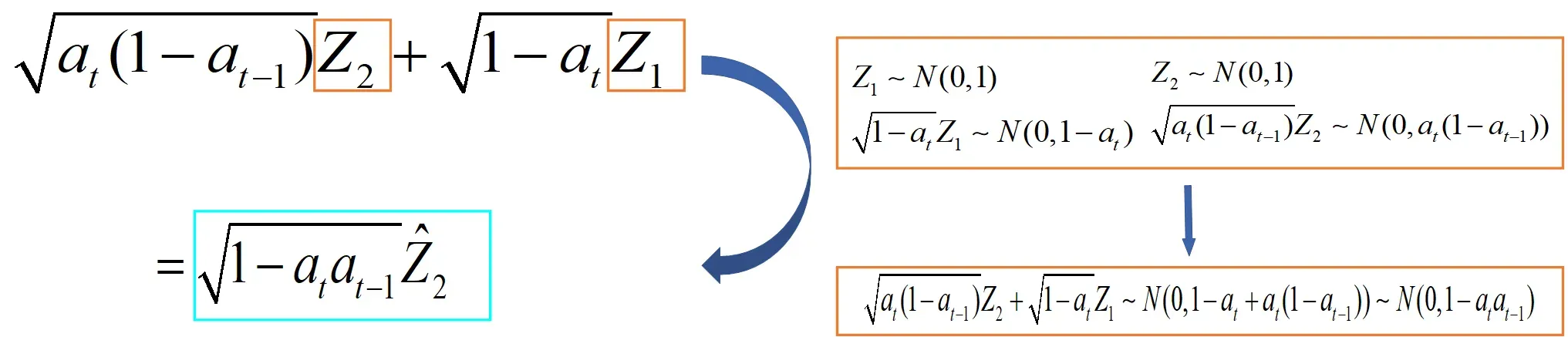
同理,我们将公式5代入到公式4中,得到

公式5我没有带大家一步步的计算了,只写出了最终结果,大家可以自己算一算,非常简单,也只用到了高斯分布的相关性质。注意上述的

其中




逆向过程
逆向过程是将高斯噪声还原为预期图片的过程。先来看看我们已知条件有什么,其实就一个
这里我们需要利用正向过程中的结论,我们在正向过程中可以由
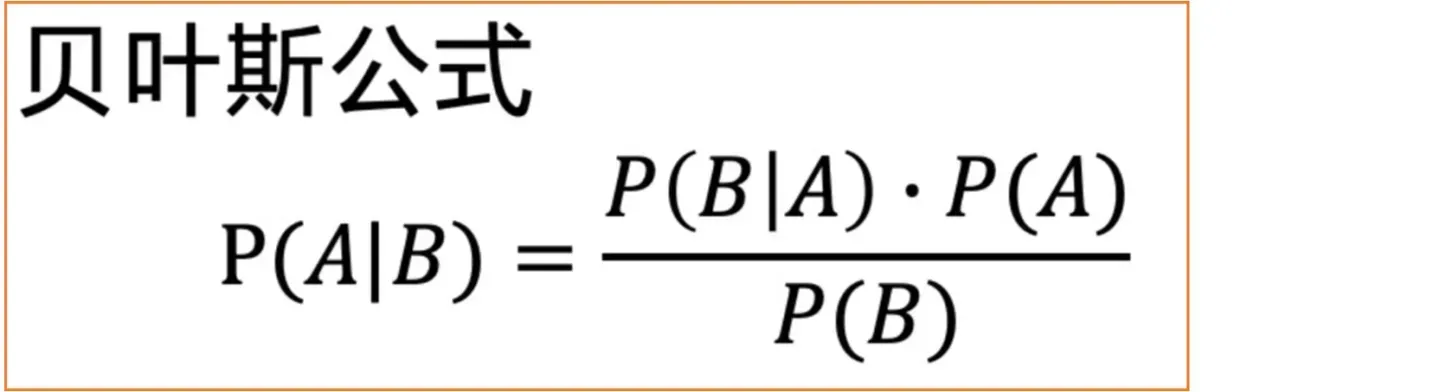

那么我们将利用贝叶斯公式来求

公式8中





现在可以发现公式9右边3项都是可以算的,我们列出它们的公式和对应的分布,如下图所示:
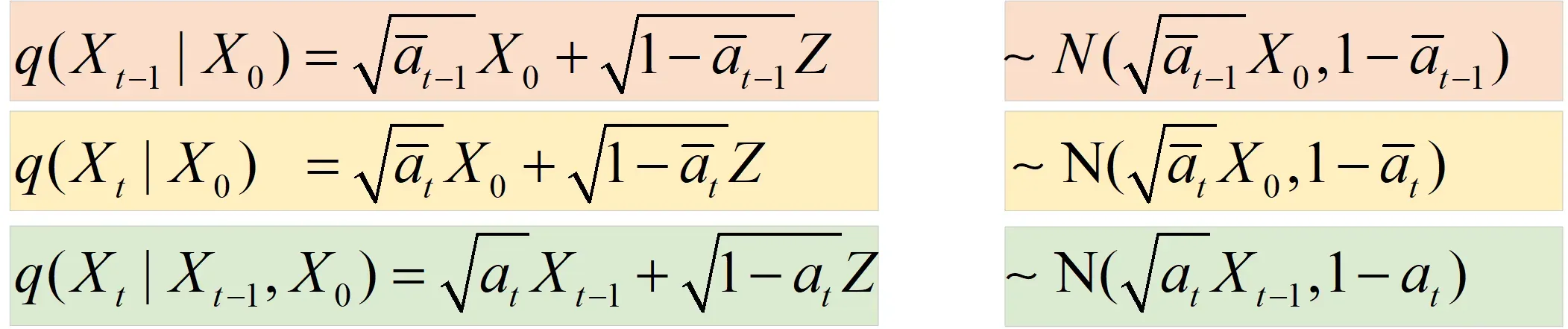

知道了公式9等式右边3项服从的分布,我们就可以计算出等式左边的


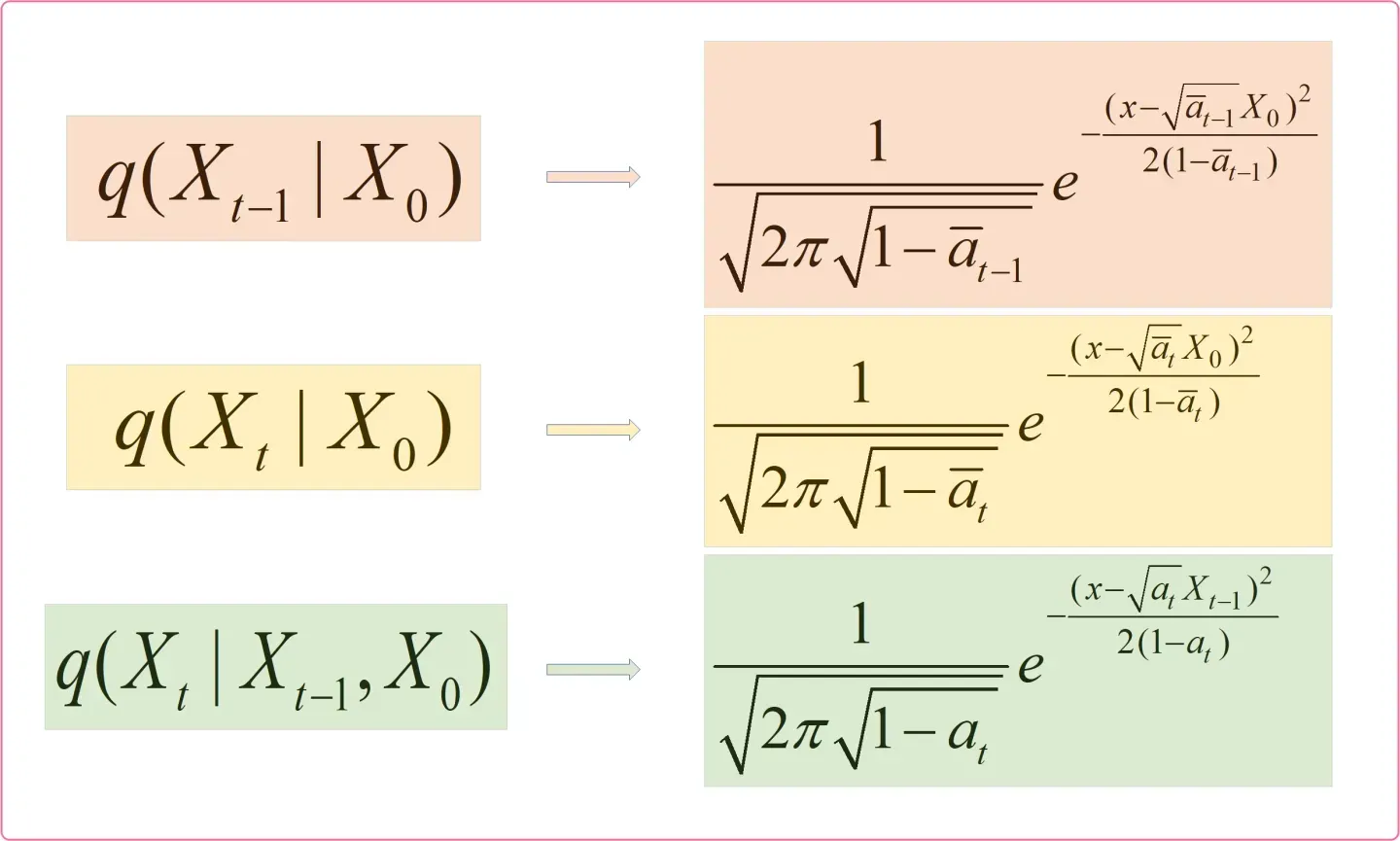

上图为等式右边三个高斯分布表达式,这个结果怎么得的大家应该都知道,就是把各自的均值和方差代入高斯分布表达式即可。现我们只需对上述三个式子进行对应乘除运算即可,如下图所示:
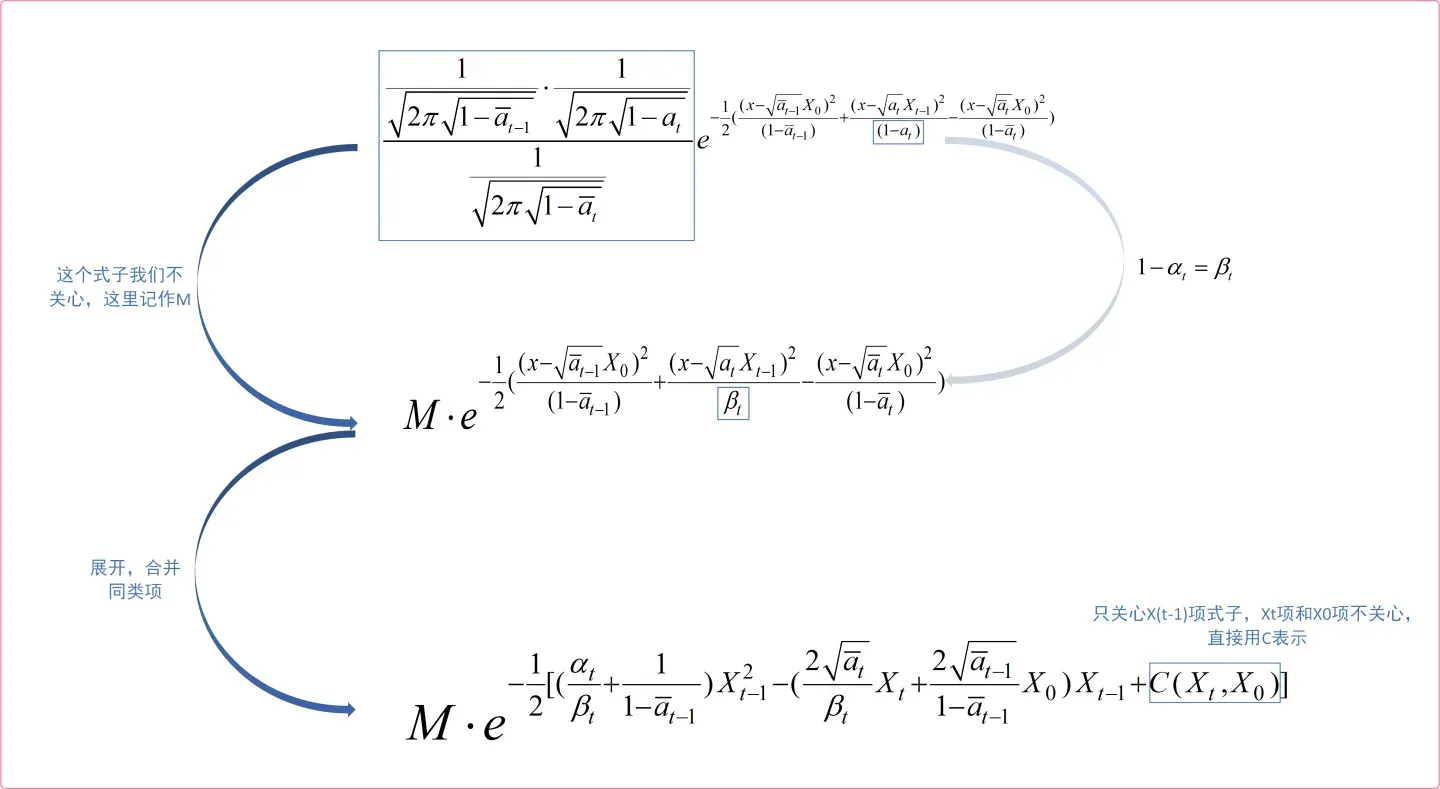

好了,我们上图中得到了式子




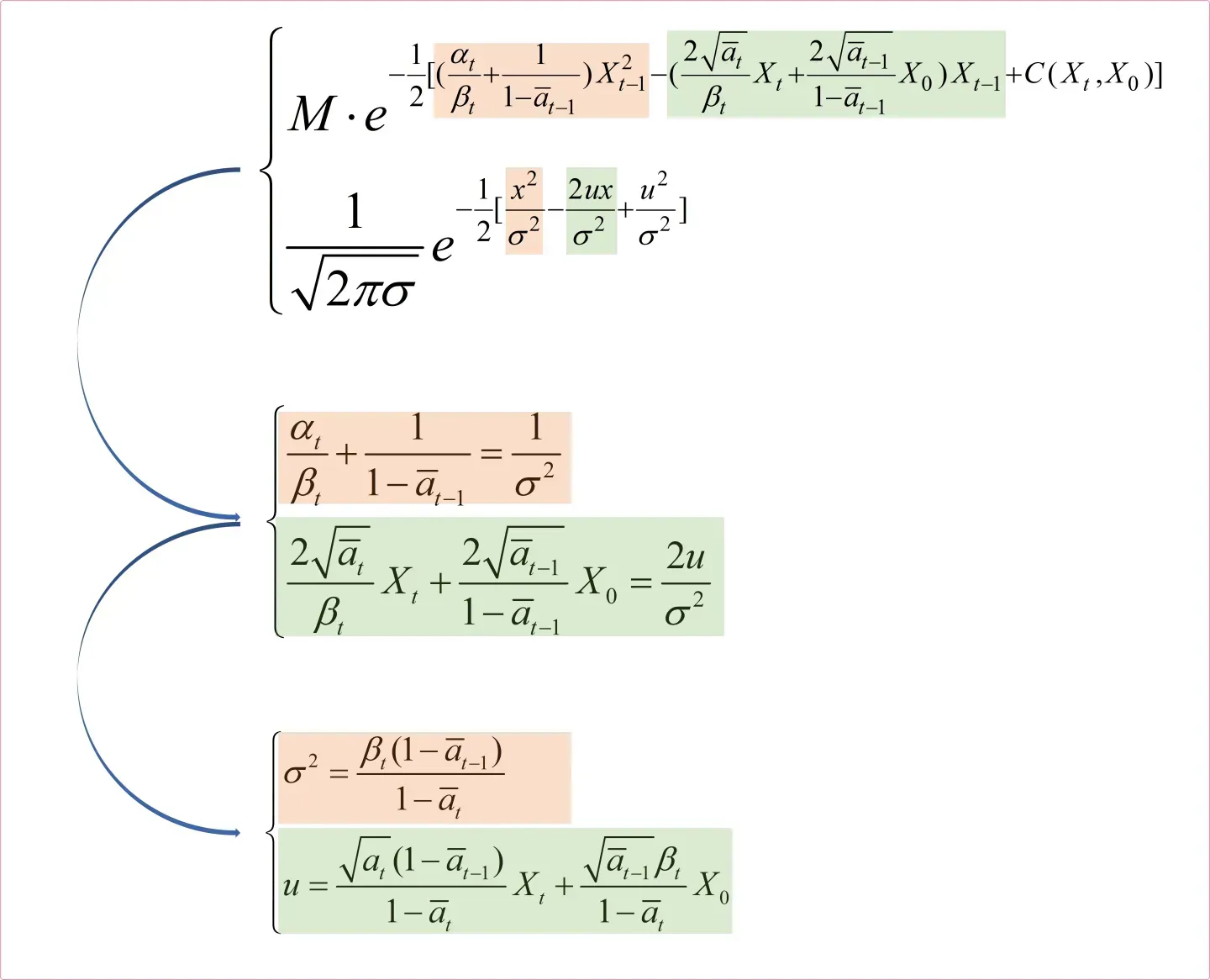

现在我们有了均值

得到


好了,现在在整理一下
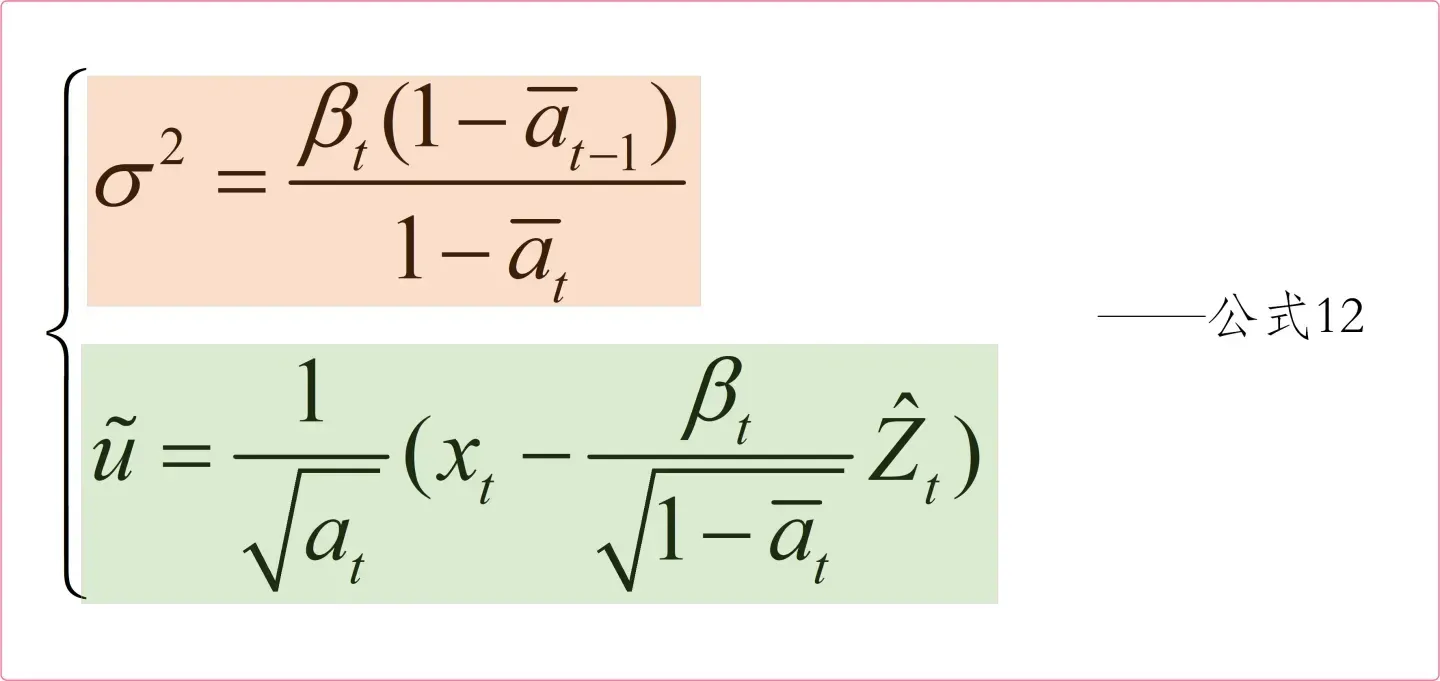

有了公式12我们就可以估计出


原理小结
这一小节原理详解部分就为大家介绍到这里了,大家听懂了多少呢。相信你阅读了此部分后,对Diffusion Model的原理其实已经有了哥大概的解了,但是肯定还有一些疑惑的地方,不用担心,代码部分会进一步帮助大家。
Diffusion Model源码解析
代码下载及使用
本次代码下载地址:Diffusion Model代码
先来说说代码的使用,代码包含两个项目,一个的ddpm.py,另一个是ddpm_condition.py。大家可以理解为ddpm.py是最简单的扩散模型,ddpm_condition.py是ddpm.py的优化。本节会以ddpm.py为大家讲解。代码使用起来非常简单,首先在ddpm.py文件中指定数据集路径,即设置dataset_path的值,然后我们就可以运行代码了。需要注意的是,如果你使用的是CPU的话,那么你可能还需要修改一下代码中的device参数。
这里来简单说说ddpm的意思,英文全称为Denoising Diffusion Probabilistic Model,中文译为去噪扩散概率模型。
代码流程图
这里我们直接来看论文中给的流程图好了,如下:
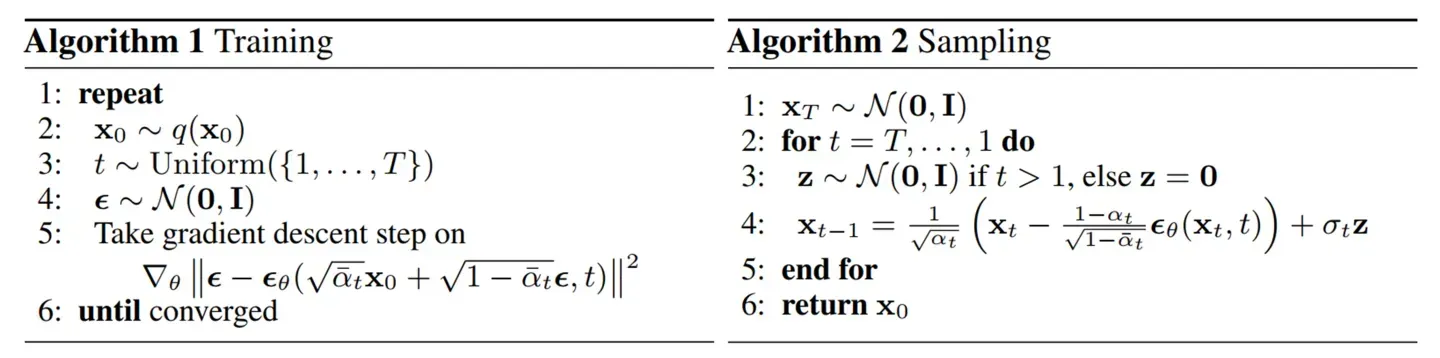

这个图表示整个算法的流程分为了训练阶段(Training)和采样阶段(Sampling)。
- Training
众所周知,训练我们需要有真实值和预测值,那么对于本例的真实值和预测值是什么呢?真实值是我们输入的图片,预测值是我们输出的图片吗?其实不是,对于本例来说,真实值和预测值都是噪声,同样拿下图为大家做个示范。

我们在正向过程中加入的噪声其实都是已知的,是可以作为真实值的。而逆向过程相当于一个去噪过程,我们用一个模型来预测噪声,让正向过程每一步加入的噪声和逆向过程对应步骤预测的噪声尽可能一致,而逆向过程预测噪声的方式就是丢入模型训练,其实就是Training中的第五步。
- Sampling
知道了训练过程,采样过程就很简单了,其实采样过程就对应我们理论部分介绍的逆向过程,由一个高斯噪声一步步向前迭代,最终得到
代码解析
首先,按照我们理论部分应该有一个正向过程,其最重要的就是最后得出的公式7,如下:
那么我们在代码中看一看是如何利用这个公式7的,代码如下:
def noise_images(self, x, t):
sqrt_alpha_hat = torch.sqrt(self.alpha_hat[t])[:, None, None, None]
sqrt_one_minus_alpha_hat = torch.sqrt(1 - self.alpha_hat[t])[:, None, None, None]
Ɛ = torch.randn_like(x)
return sqrt_alpha_hat * x + sqrt_one_minus_alpha_hat * Ɛ, Ɛ
Ɛ为随机的标准高斯分布,其实也就是真实值。大家可以看出,上式的返回值sqrt_alpha_hat * x + sqrt_one_minus_alpha_hat其实就表示公式7。【注:这个代码我省略了很多细节,我只把关键的代码展示给大家看,要想完全明白,还需要大家记住调试调试了】
接着我们就通过一个模型预测噪声,如下:
predicted_noise = model(x_t, t)
model的结构很简单,就是一个Unet结构,然后里面嵌套了几个Transformer机制,我就不带大家跳进去慢慢看了。现在有了预测值,也有了真实值Ɛ【返回后Ɛ用noise表示】,就可以计算他们的损失并不断迭代了。
loss = mse(noise, predicted_noise)
optimizer.zero_grad()
loss.backward()
optimizer.step()
上述其实就是训练过程的大体结构,我省略了很多,现在来看看采样过程的代码。
def sample(self, model, n):
logging.info(f"Sampling {n} new images....")
model.eval()
with torch.no_grad():
x = torch.randn((n, 3, self.img_size, self.img_size)).to(self.device)
# for i in tqdm(reversed(range(1, self.noise_steps)), position=0):
for i in tqdm(reversed(range(1, 5)), position=0):
t = (torch.ones(n) * i).long().to(self.device)
predicted_noise = model(x, t)
alpha = self.alpha[t][:, None, None, None]
alpha_hat = self.alpha_hat[t][:, None, None, None]
beta = self.beta[t][:, None, None, None]
if i > 1:
noise = torch.randn_like(x)
else:
noise = torch.zeros_like(x)
x = 1 / torch.sqrt(alpha) * (x - ((1 - alpha) / (torch.sqrt(1 - alpha_hat))) * predicted_noise) + torch.sqrt(beta) * noise
model.train()
x = (x.clamp(-1, 1) + 1) / 2
x = (x * 255).type(torch.uint8)
return x
上述代码关键的就是 x = 1 / torch.sqrt(alpha) * (x - ((1 - alpha) / (torch.sqrt(1 - alpha_hat))) * predicted_noise) + torch.sqrt(beta) * noise这个公式,其对应着代码流程图中Sampling阶段中的第4步。需要注意一下这里的跟方差




代码小结
可以看出,这一部分所用的篇幅很少,只列出了关键的部分,很多细节需要大家自己感悟。比如代码中时刻T的用法,其实是较难理解的,代码中将其作为正余弦位置编码处理。如果你对位置编码不熟悉,可以看一下这篇文章,有详细的介绍位置编码。
附录
高斯分布性质
高斯分布又称正态分布,其表达式为:
其中


高斯分布还有一些非常好的性质,现举一些例子帮助大家理解。
- 若
- 若



参考内容:Diffusion Model原理详解及源码解析 – 知乎 (zhihu.com)
文章出处登录后可见!