

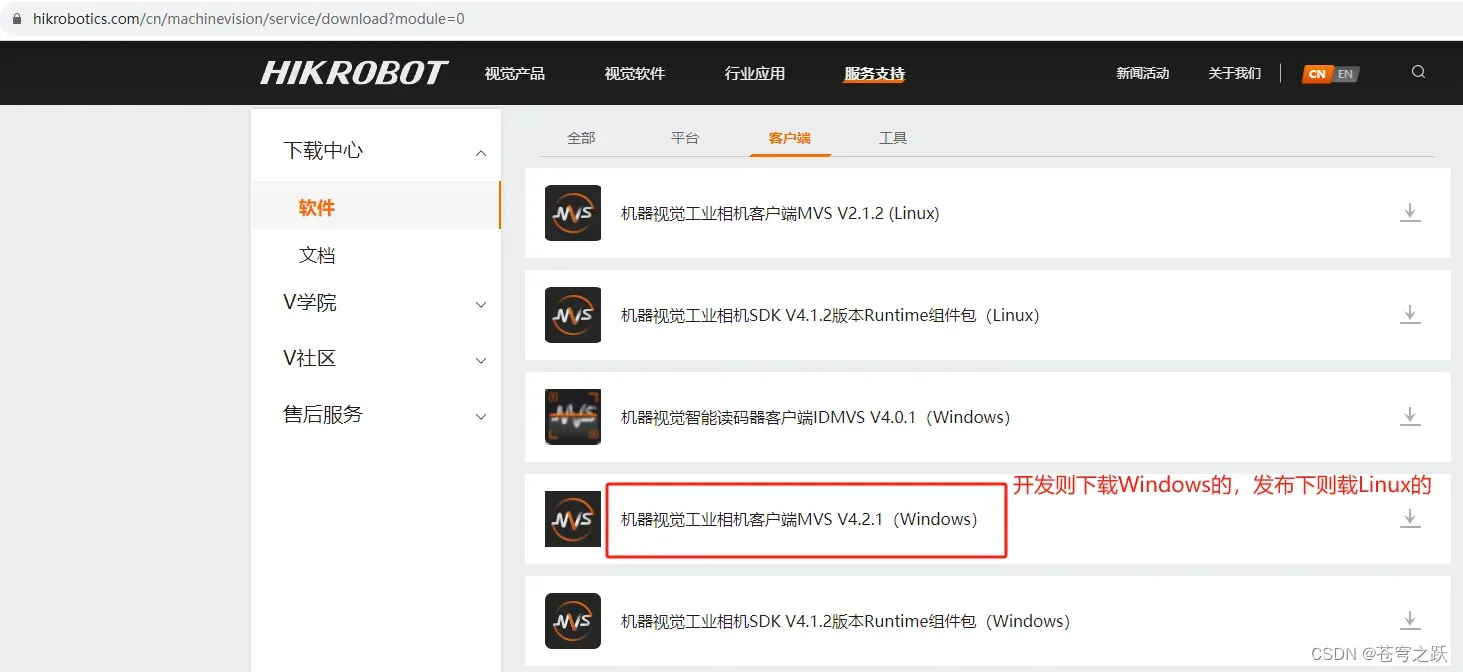
一、下载MVS客户端
海康机器人-机器视觉-下载中心

二、解压并安装MVS客户端







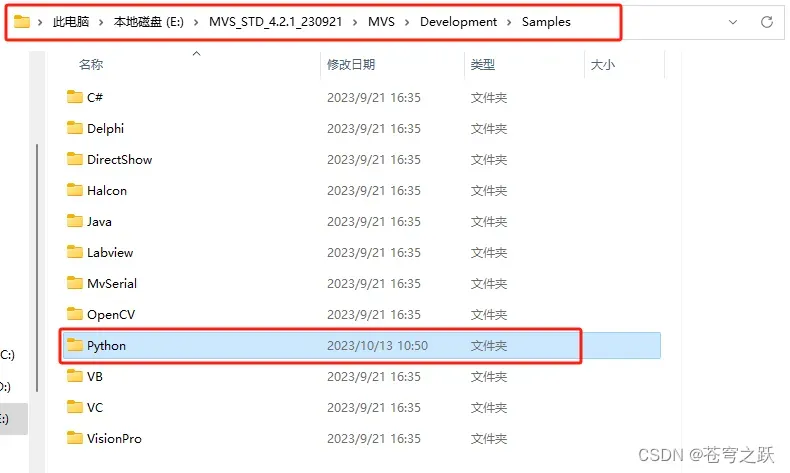
三、找到MVS示例代码(代码在MVS的安装位置)
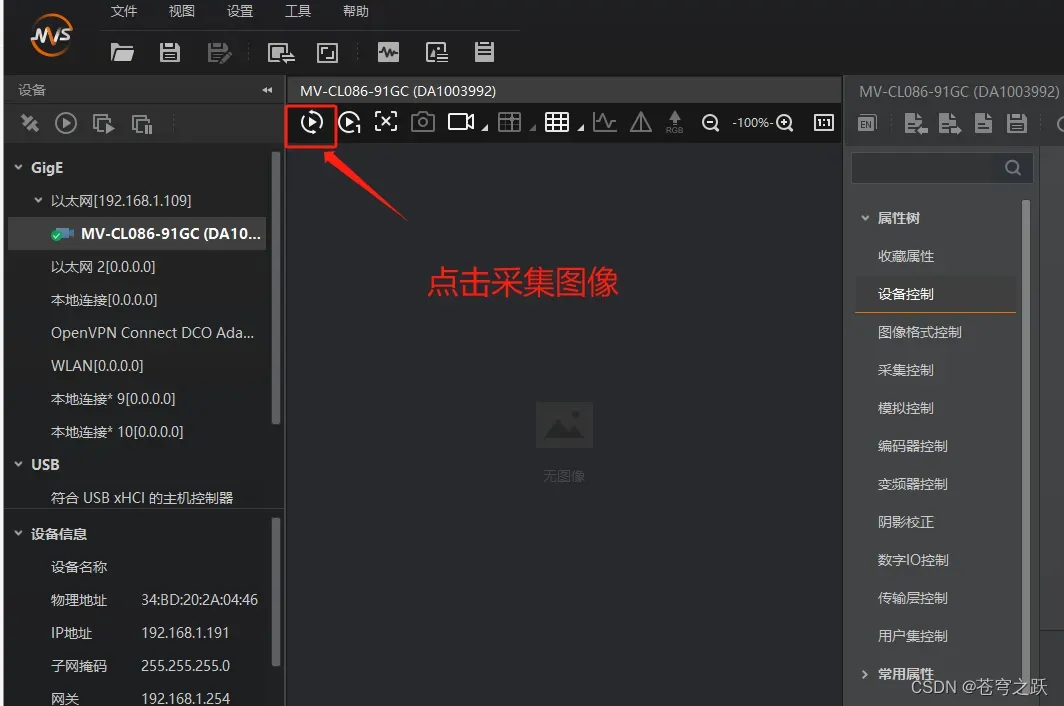
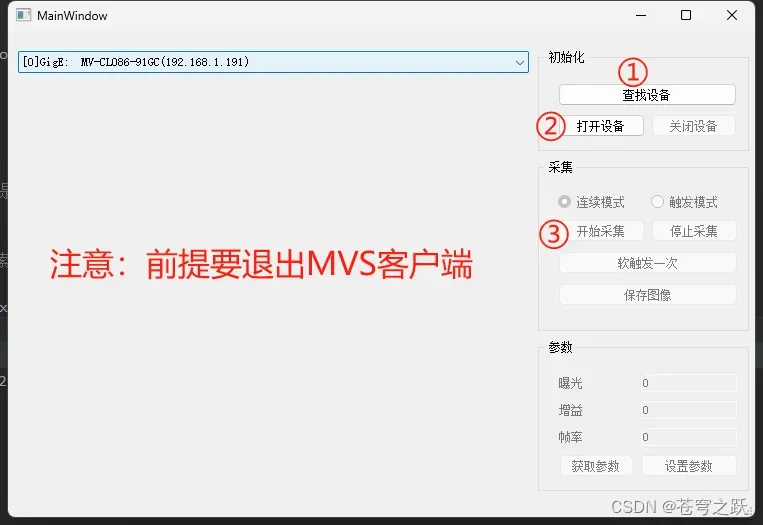
工业相机只允许单条连接,也就是说MVS如果连接了相机,python代码就无法获取数据,此时必须退出MVS客户端。

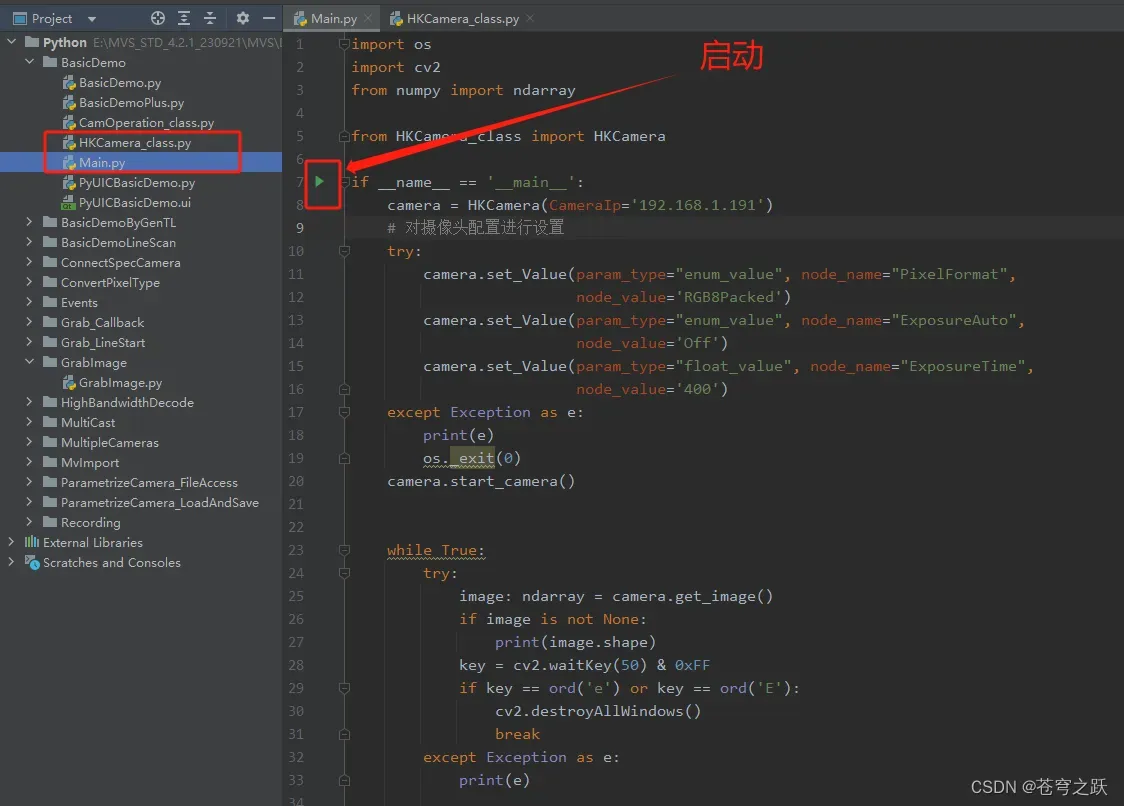
四、使用Pycharm打开Python代码示例文件夹
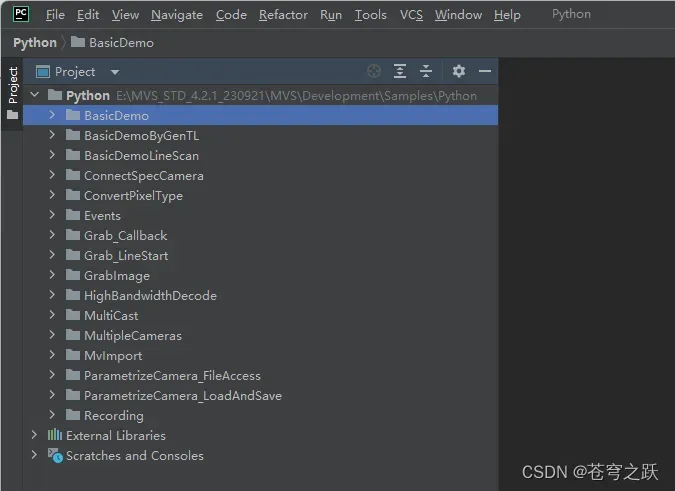





博主这里出现了一个警告:获取不到相机参数。忽略掉即可。


五、获取相机图像
安装一下opencv
pip3 install opencv-python -i https://pypi.tuna.tsinghua.edu.cn/simple相机工具类(读者直接复制)HKCamera_class.py
import sys
from ctypes import *
import numpy as np
import cv2
# 这里要根据个人情况进行修改 TODO
sys.path.append("E:\MVS_STD_4.2.1_230921\MVS\Development\Samples\Python\MvImport") # 打开MVS中的MvImport文件,对于不同系统打开的文件路径跟随实际文件路径变化即可
from MvCameraControl_class import * # 调用了MvCameraControl_class.py文件
class HKCamera():
def __init__(self, CameraIdx=0, log_path=None, CameraIp=""):
self.name = "HKCamera"
deviceList = self.enum_devices()
strModeName = ""
TargetCamera = None
for i in range(0, deviceList.nDeviceNum):
mvcc_dev_info = cast(deviceList.pDeviceInfo[i], POINTER(MV_CC_DEVICE_INFO)).contents
nip1 = ((mvcc_dev_info.SpecialInfo.stGigEInfo.nCurrentIp & 0xff000000) >> 24)
nip2 = ((mvcc_dev_info.SpecialInfo.stGigEInfo.nCurrentIp & 0x00ff0000) >> 16)
nip3 = ((mvcc_dev_info.SpecialInfo.stGigEInfo.nCurrentIp & 0x0000ff00) >> 8)
nip4 = (mvcc_dev_info.SpecialInfo.stGigEInfo.nCurrentIp & 0x000000ff)
Devip = "%d.%d.%d.%d" % (nip1, nip2, nip3, nip4)
if Devip == CameraIp:
TargetCamera = i
self.camera = self.open_camera(deviceList=deviceList, CameraIdx=TargetCamera, log_path=log_path)
# self.start_camera()
def __del__(self):
if self.camera is None:
return
# 停止取流
# ret = self.camera.MV_CC_StopGrabbing()
# if ret != 0:
# raise Exception("stop grabbing fail! ret[0x%x]" % ret)
# 关闭设备
ret = self.camera.MV_CC_CloseDevice()
if ret != 0:
raise Exception("close deivce fail! ret[0x%x]" % ret)
# 销毁句柄
ret = self.camera.MV_CC_DestroyHandle()
if ret != 0:
raise Exception("destroy handle fail! ret[0x%x]" % ret)
@staticmethod
def enum_devices(device=0, device_way=False):
"""
device = 0 枚举网口、USB口、未知设备、cameralink 设备
device = 1 枚举GenTL设备
"""
if device_way == False:
if device == 0:
cameraType = MV_GIGE_DEVICE | MV_USB_DEVICE | MV_UNKNOW_DEVICE | MV_1394_DEVICE | MV_CAMERALINK_DEVICE
deviceList = MV_CC_DEVICE_INFO_LIST()
# 枚举设备
ret = MvCamera.MV_CC_EnumDevices(cameraType, deviceList)
if ret != 0:
raise Exception("enum devices fail! ret[0x%x]" % ret)
return deviceList
else:
pass
elif device_way == True:
pass
def open_camera(self, deviceList, CameraIdx, log_path):
# generate a camera instance
camera = MvCamera()
# 选择设备并创建句柄
stDeviceList = cast(deviceList.pDeviceInfo[CameraIdx], POINTER(MV_CC_DEVICE_INFO)).contents
if log_path is not None:
ret = self.camera.MV_CC_SetSDKLogPath(log_path)
if ret != 0:
raise Exception("set Log path fail! ret[0x%x]" % ret)
# 创建句柄,生成日志
ret = camera.MV_CC_CreateHandle(stDeviceList)
if ret != 0:
raise Exception("create handle fail! ret[0x%x]" % ret)
else:
# 创建句柄,不生成日志
ret = camera.MV_CC_CreateHandleWithoutLog(stDeviceList)
if ret != 0:
raise Exception("create handle fail! ret[0x%x]" % ret)
# 打开相机
ret = camera.MV_CC_OpenDevice(MV_ACCESS_Exclusive, 0)
if ret != 0:
raise Exception("open device fail! ret[0x%x]" % ret)
return camera
def start_camera(self):
stParam = MVCC_INTVALUE()
memset(byref(stParam), 0, sizeof(MVCC_INTVALUE))
ret = self.camera.MV_CC_GetIntValue("PayloadSize", stParam)
if ret != 0:
raise Exception("get payload size fail! ret[0x%x]" % ret)
self.nDataSize = stParam.nCurValue
self.pData = (c_ubyte * self.nDataSize)()
self.stFrameInfo = MV_FRAME_OUT_INFO_EX()
memset(byref(self.stFrameInfo), 0, sizeof(self.stFrameInfo))
self.camera.MV_CC_StartGrabbing()
def get_Value(self, param_type, node_name):
"""
:param cam: 相机实例
:param_type: 获取节点值得类型
:param node_name: 节点名 可选 int 、float 、enum 、bool 、string 型节点
:return: 节点值
"""
if param_type == "int_value":
stParam = MVCC_INTVALUE_EX()
memset(byref(stParam), 0, sizeof(MVCC_INTVALUE_EX))
ret = self.camera.MV_CC_GetIntValueEx(node_name, stParam)
if ret != 0:
raise Exception("获取 int 型数据 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
return stParam.nCurValue
elif param_type == "float_value":
stFloatValue = MVCC_FLOATVALUE()
memset(byref(stFloatValue), 0, sizeof(MVCC_FLOATVALUE))
ret = self.camera.MV_CC_GetFloatValue(node_name, stFloatValue)
if ret != 0:
raise Exception("获取 float 型数据 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
return stFloatValue.fCurValue
elif param_type == "enum_value":
stEnumValue = MVCC_ENUMVALUE()
memset(byref(stEnumValue), 0, sizeof(MVCC_ENUMVALUE))
ret = self.camera.MV_CC_GetEnumValue(node_name, stEnumValue)
if ret != 0:
raise Exception("获取 enum 型数据 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
return stEnumValue.nCurValue
elif param_type == "bool_value":
stBool = c_bool(False)
ret = self.camera.MV_CC_GetBoolValue(node_name, stBool)
if ret != 0:
raise Exception("获取 bool 型数据 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
return stBool.value
elif param_type == "string_value":
stStringValue = MVCC_STRINGVALUE()
memset(byref(stStringValue), 0, sizeof(MVCC_STRINGVALUE))
ret = self.camera.MV_CC_GetStringValue(node_name, stStringValue)
if ret != 0:
raise Exception("获取 string 型数据 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
return stStringValue.chCurValue
else:
return None
def set_Value(self, param_type, node_name, node_value):
"""
:param cam: 相机实例
:param param_type: 需要设置的节点值得类型
int:
float:
enum: 参考于客户端中该选项的 Enum Entry Value 值即可
bool: 对应 0 为关,1 为开
string: 输入值为数字或者英文字符,不能为汉字
:param node_name: 需要设置的节点名
:param node_value: 设置给节点的值
:return:
"""
if param_type == "int_value":
ret = self.camera.MV_CC_SetIntValueEx(node_name, int(node_value))
if ret != 0:
raise Exception("设置 int 型数据节点 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
elif param_type == "float_value":
ret = self.camera.MV_CC_SetFloatValue(node_name, float(node_value))
if ret != 0:
raise Exception("设置 float 型数据节点 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
elif param_type == "enum_value":
ret = self.camera.MV_CC_SetEnumValueByString(node_name, node_value)
if ret != 0:
raise Exception("设置 enum 型数据节点 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
elif param_type == "bool_value":
ret = self.camera.MV_CC_SetBoolValue(node_name, node_value)
if ret != 0:
raise Exception("设置 bool 型数据节点 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
elif param_type == "string_value":
ret = self.camera.MV_CC_SetStringValue(node_name, str(node_value))
if ret != 0:
raise Exception("设置 string 型数据节点 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
def set_exposure_time(self, exp_time):
self.set_Value(param_type="float_value", node_name="ExposureTime", node_value=exp_time)
def get_exposure_time(self):
return self.get_Value(param_type="float_value", node_name="ExposureTime")
def get_image(self, width=None):
"""
:param cam: 相机实例
:active_way:主动取流方式的不同方法 分别是(getImagebuffer)(getoneframetimeout)
:return:
"""
# ret= self.camera.MV_CC_SaveImageEx2()
ret = self.camera.MV_CC_GetOneFrameTimeout(self.pData, self.nDataSize, self.stFrameInfo, 5000)
if ret == 0:
image = np.asarray(self.pData).reshape((self.stFrameInfo.nHeight, self.stFrameInfo.nWidth, 3))
# if width is not None:
# image = cv2.resize(image, (width, int(self.stFrameInfo.nHeight * width / self.stFrameInfo.nWidth)))
# pass
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
return image
else:
return None
def show_runtime_info(self, image):
exp_time = self.get_exposure_time()
cv2.putText(image, ("exposure time = %1.1fms" % (exp_time * 0.001)), (20, 50), cv2.FONT_HERSHEY_SIMPLEX, 0.5,
255, 1)
获取照片数据
Main.pyimport os
import cv2
from numpy import ndarray
from HKCamera_class import HKCamera
if __name__ == '__main__':
camera = HKCamera(CameraIp='192.168.1.191')
# 对摄像头配置进行设置
try:
camera.set_Value(param_type="enum_value", node_name="PixelFormat",
node_value='RGB8Packed')
camera.set_Value(param_type="enum_value", node_name="ExposureAuto",
node_value='Off')
camera.set_Value(param_type="float_value", node_name="ExposureTime",
node_value='400')
except Exception as e:
print(e)
os._exit(0)
camera.start_camera()
while True:
try:
image: ndarray = camera.get_image()
if image is not None:
# 这里拿到图片的ndarray数据后,可以转Image、可以保存图片....等等操作
print(image.shape)
key = cv2.waitKey(50) & 0xFF
if key == ord('e') or key == ord('E'):
cv2.destroyAllWindows()
break
except Exception as e:
print(e)

文章出处登录后可见!
已经登录?立即刷新