这学期做的一个大作业,实现了对行驶过程中车辆、行人以及车道线的检测。
1.B站视频演示
2.Github仓库链接
文章目录
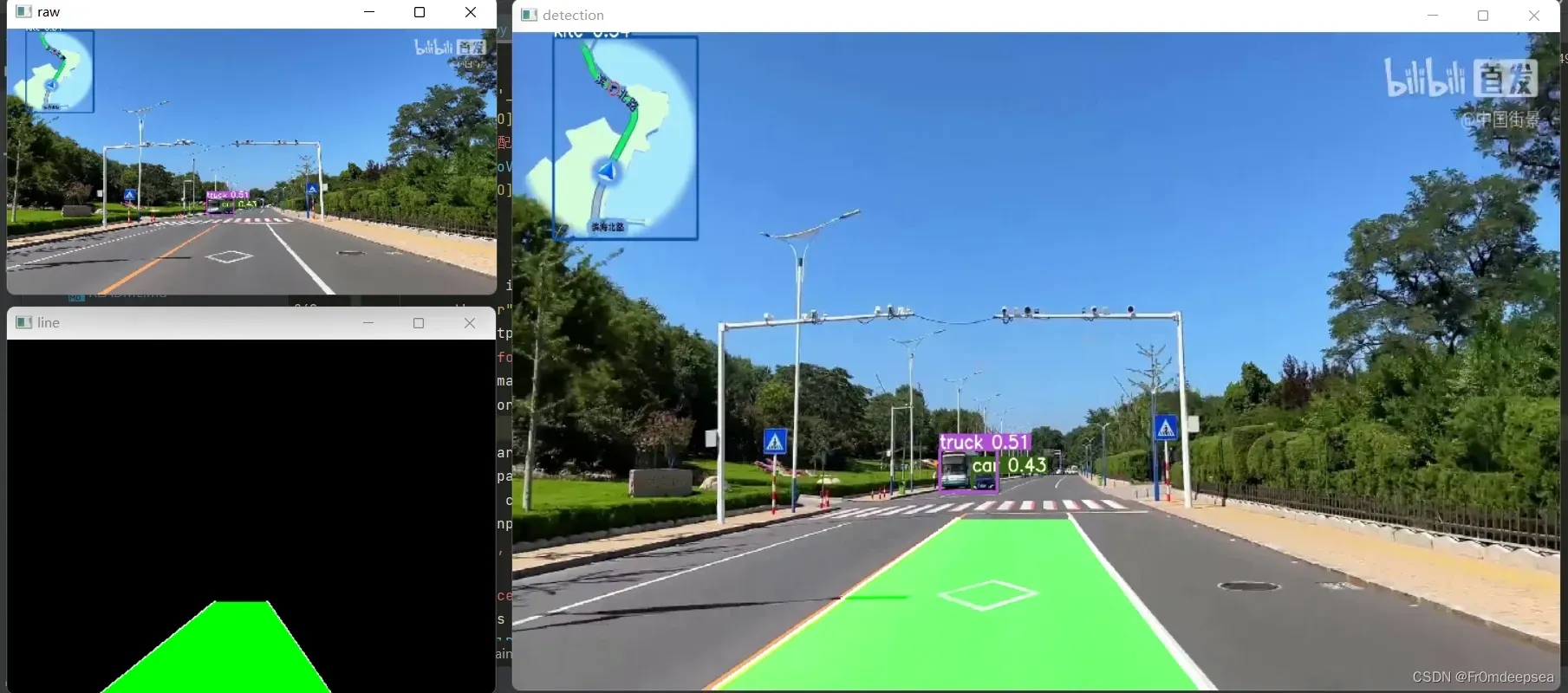
一、实现效果
第一个是其他车道线检测里拿的视频素材,第二个是b站中国街景的驾车实拍视频。
主要的检测流程是:
- 选择一段你喜欢的路况视频,按帧分解为图片(提供视频帧分解程序
mp4tofigure.py) - 图片预处理,设定Canny高低阈值以及ROI标定(提供动态调整Canny高低阈值的辅助程序
Canny_check.py,交互式ROI标定的辅助程序roi_setup.py) - 送入主程序
main.py,进行目标检测和车道线检测。 - 检测结果为图片,可以转换成视频(提供导出视频程序
figure2video.py)

二、环境配置
一个可以运行YOLOv5的python环境,与之前的一篇博客Realsense D435i Yolov5目标检测实时获得目标三维位置信息差不多。
仓库结构
三、基于YOLOv5的目标检测
这部分没啥特别的,就是套YOLOv5框架。不过由于原版的YOLOv5代码过于冗长,为后期与车道线检测的代码相结合,对YOLOv5源代码进行适当的简化封装,将检测过程基于一个封装的函数实现,如下所示。Canvas为返回的图像矩阵,class_id_list为检测到类的id列表,xyxy_list为检测框的角点位置像素坐标,conf_list为置信度列表。
canvas, class_id_list, xyxy_list, conf_list = model.detect(color_image)
选用YOLOv5s权重,其中前八类为为交通相关。
['person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus', 'train', 'truck', 'boat', 'traffic light']
效果如下

四、基于Hough变换的车道线检测
基于Hough变换的车道线检测流程为:输入图片——Canny轮廓检测——设定ROI——Hough变换提取直线——结果信息绘制。
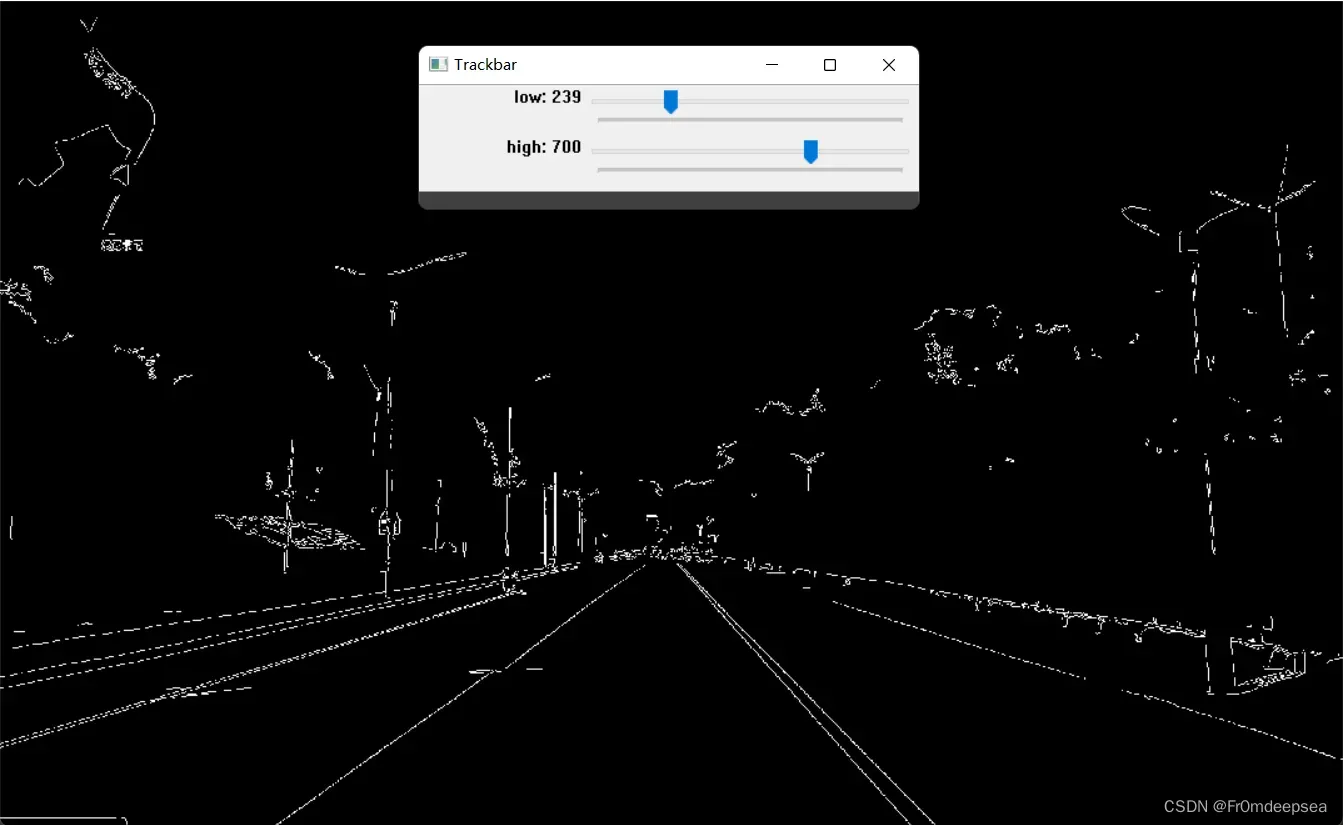
4.1 前置工作 Canny阈值设定
首先需要调整一下Canny的阈值,使得轮廓检测出来的车道线连续平滑。
这里提供一个可以动态调整Canny高低阈值的辅助程序 Canny_check.py
import cv2
para=[300,400]
def nothing(*arg):
pass
cv2.namedWindow('Trackbar')
cv2.resizeWindow('Trackbar', 400, 100)
cv2.createTrackbar('low', 'Trackbar', para[0], 1000, nothing)
cv2.createTrackbar('high', 'Trackbar', para[1], 1000, nothing)
source=cv2.imread("test.jpg")
img=source.copy()
cv2.namedWindow("canny", 0)
while(1):
img = source.copy()
low = cv2.getTrackbarPos('low', 'Trackbar')
high = cv2.getTrackbarPos('high', 'Trackbar')
img = cv2.Canny(img, low, high)
cv2.imshow("canny", img)
cv2.waitKey(20)
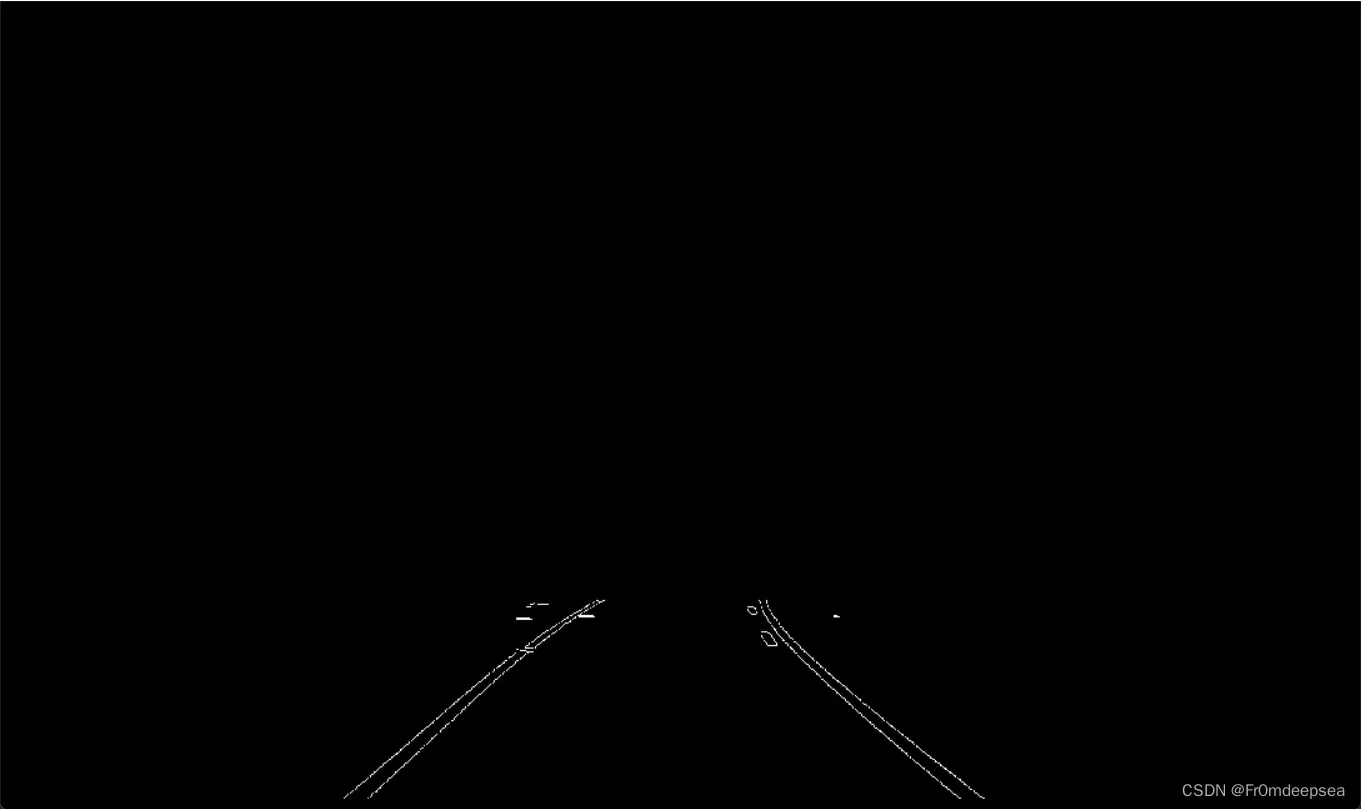
4.2 前置工作 ROI标定
接着需要标定出车道线检测范围的ROI
这里提供一个交互式ROI标定的辅助程序roi_setup.py,按顺时针顺序左键进行像素标定,右键完成像素点连接,中键清除所有标记,最终可以导出标定结果。


import cv2
import numpy as np
def mouse(event, x, y, flags, param):
img1 = img.copy()
if event == cv2.EVENT_LBUTTONDOWN:
x_list.append(x)
y_list.append(y)
# print(x_list)
for i in range(len(x_list)):
xy = "(%d,%d)" % (x_list[i], y_list[i])
cv2.circle(img1, (x_list[i], y_list[i]), 1, (0, 0, 255), thickness=2)
cv2.putText(img1, xy, (x_list[i], y_list[i]), cv2.FONT_HERSHEY_PLAIN, 2, (0, 0, 255), thickness=2)
cv2.imshow("image", img1) # 显示坐标
if event == cv2.EVENT_RBUTTONDOWN:
for i in range(len(x_list)-1):
cv2.line(img1, [x_list[i],y_list[i]] ,[x_list[i+1],y_list[i+1]],(0,0,255),thickness=2)
cv2.line(img1, [x_list[-1], y_list[-1]], [x_list[0], y_list[0]], (0, 0, 255), thickness=2)
cv2.imshow("image", img1)
if event == cv2.EVENT_MBUTTONDOWN:
img1 = img.copy()
cv2.imshow("image", img1)
x_list.clear()
y_list.clear()
def get_coordinate_by_click(img_path):
global img
img = cv2.imread(img_path) # 图片路径
cv2.namedWindow("image", 0) # 设置窗口标题和大小
cv2.setMouseCallback("image", mouse)
cv2.imshow("image", img)
cv2.waitKey(0)
print("x坐标:",x_list)
print("y坐标:",y_list)
cv2.destroyAllWindows()
if __name__ == '__main__':
x_list=[]
y_list=[]
img_path = r'./figure/2/1.jpg'
get_coordinate_by_click(img_path)
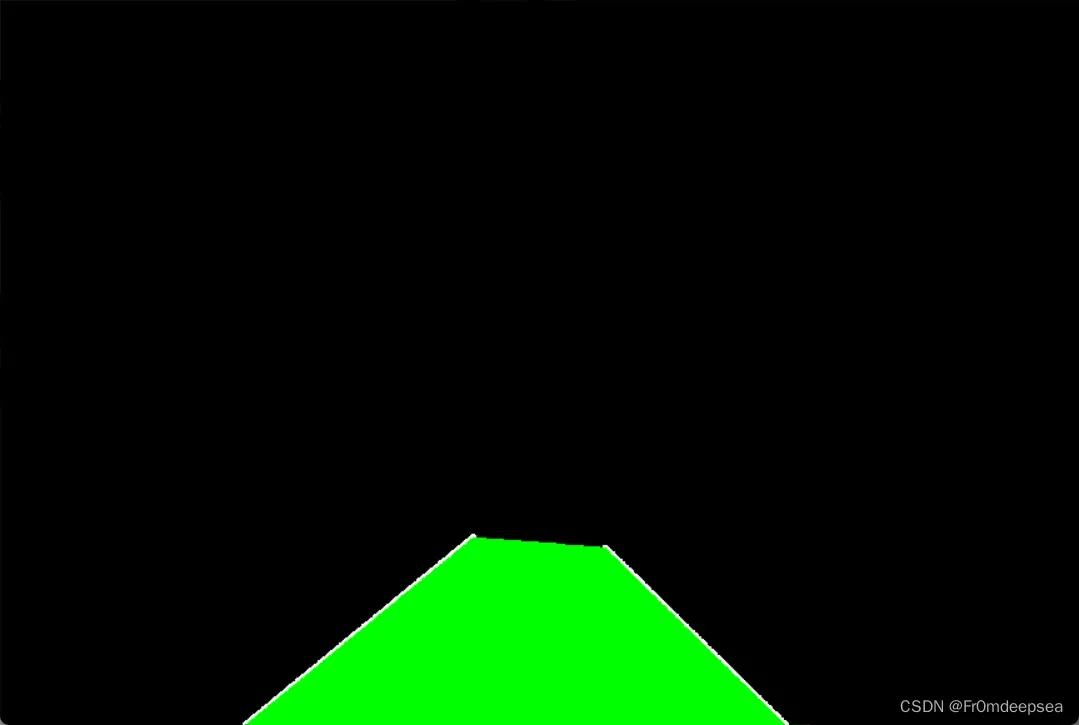
4.3 Hough变换提取直线
按照之前标定的ROI进行Hough变换,检测到的直线绘制一个绿色的蒙板。
五、核心代码
import numpy as np
import cv2
from myClass import YoloV5
from myFunction import weighted_img, draw_lines, hough_lines
if __name__ == '__main__':
print("[INFO] 开始YoloV5模型加载")
# YOLOV5模型配置文件(YAML格式)的路径 yolov5_yaml_path
model = YoloV5(yolov5_yaml_path='config/yolov5s.yaml')
print("[INFO] 完成YoloV5模型加载")
low = 200 #Canny low
high = 300 #Canny high
rho = 1 # 霍夫像素单位
theta = np.pi / 360 # 霍夫角度移动步长
hof_threshold = 20 # 霍夫平面累加阈值threshold
min_line_len = 10 # 线段最小长度
max_line_gap = 20 # 最大允许断裂长度
index = 0 #图片索引
while True:
index = index + 1
# 一张一张图片进行检测按index进行索引
path = r"./figure/1/" + str(index) + ".jpg"
path_output = r"./out/2/" + str(index) + ".jpg"
color_image = cv2.imread(path)
lane_img=color_image.copy()
edges = cv2.Canny(lane_img, low, high)
mask = np.zeros_like(edges)
# vertices = np.array( [[(554, 463), (733, 464), (1112, 654), (298, 671)]],dtype=np.int32)#素材2的ROI
vertices = np.array( [[(757, 800), (1150, 800), (1556, 1064), (314, 1064)]],dtype=np.int32)#素材1的ROI
cv2.fillPoly(mask, vertices, 255)#绿色蒙板绘制
masked_edges = cv2.bitwise_and(edges, mask) # 按位与
line_image = np.zeros_like(lane_img)
# 绘制车道线线段
lines = hough_lines(masked_edges, rho, theta, hof_threshold, min_line_len, max_line_gap)
draw_lines(line_image, lines, thickness=10)
# YoloV5 目标检测
canvas, class_id_list, xyxy_list, conf_list = model.detect(color_image)
if xyxy_list:
for i in range(len(xyxy_list)):
ux = int((xyxy_list[i][0] + xyxy_list[i][2]) / 2) # 计算像素坐标系的x
uy = int((xyxy_list[i][1] + xyxy_list[i][3]) / 2) # 计算像素坐标系的y
cv2.circle(canvas, (ux, uy), 4, (255, 255, 255), 5) # 标出中心点
cv2.putText(canvas, str([ux, uy]), (ux + 20, uy + 10), 0, 1,
[225, 255, 255], thickness=2, lineType=cv2.LINE_AA) # 标出坐标
canvas=weighted_img(canvas, line_image)
# 可视化部分
cv2.namedWindow("raw", 0)
cv2.imshow('raw',color_image)
cv2.namedWindow("line", 0)
cv2.imshow('line',line_image)
cv2.namedWindow('detection', 0)
cv2.imshow('detection', canvas)
# cv2.imwrite(path_output, canvas)#图片保存
key = cv2.waitKey()
# Press esc or 'q' to close the image window
if key & 0xFF == ord('q') or key == 27:
cv2.destroyAllWindows()
break
文章出处登录后可见!