👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
移动数据处理技术在通信行业的使用正在增加。由于这项技术,具有大计算能力的物联网设备可能会以灵活和及时的方式推出独特的应用程序和服务。当边缘服务器用于卸载计算密集型任务时,延迟降低,能耗降低。近年来,无人机(UAV)以终端用户的多址边缘计算服务器的形式得到了利用。由于其灵活的部署、全面的控制和网络性能,UA V辅助无线通信受到了广泛的研究兴趣UAV辅助的边缘计算网络是有意义的,并且在处理巨大设备的通信和处理需求时是一个有趣的概念。
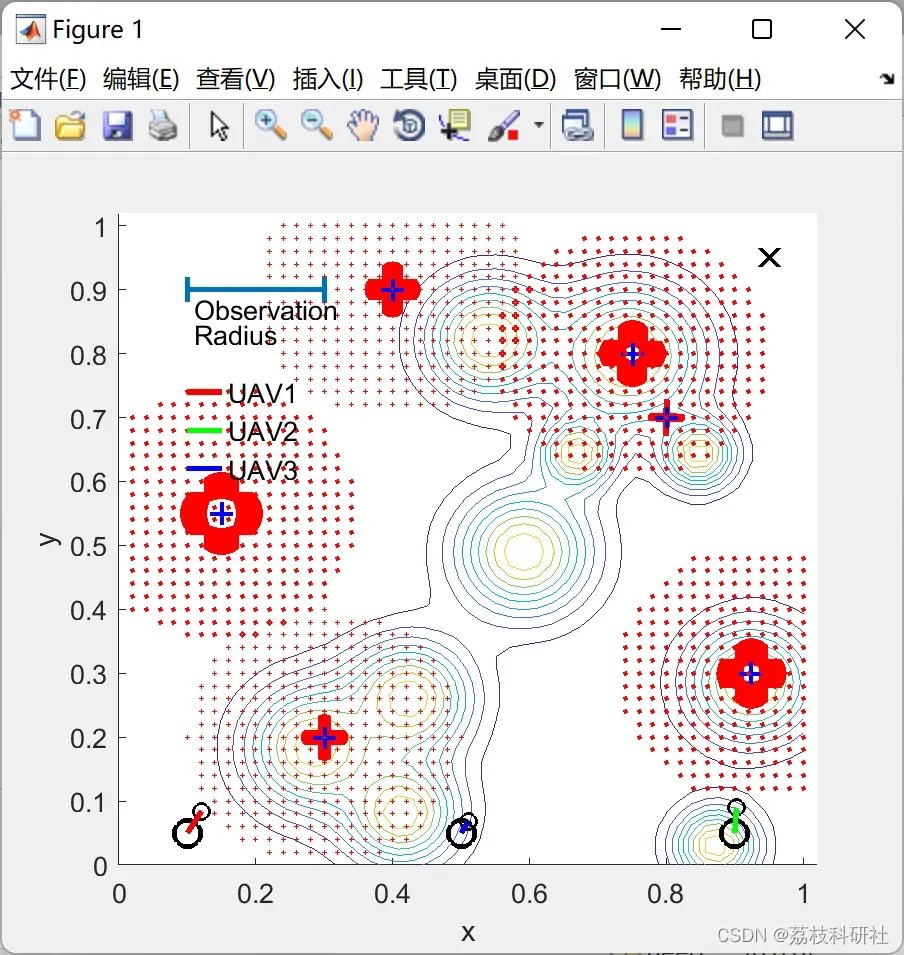
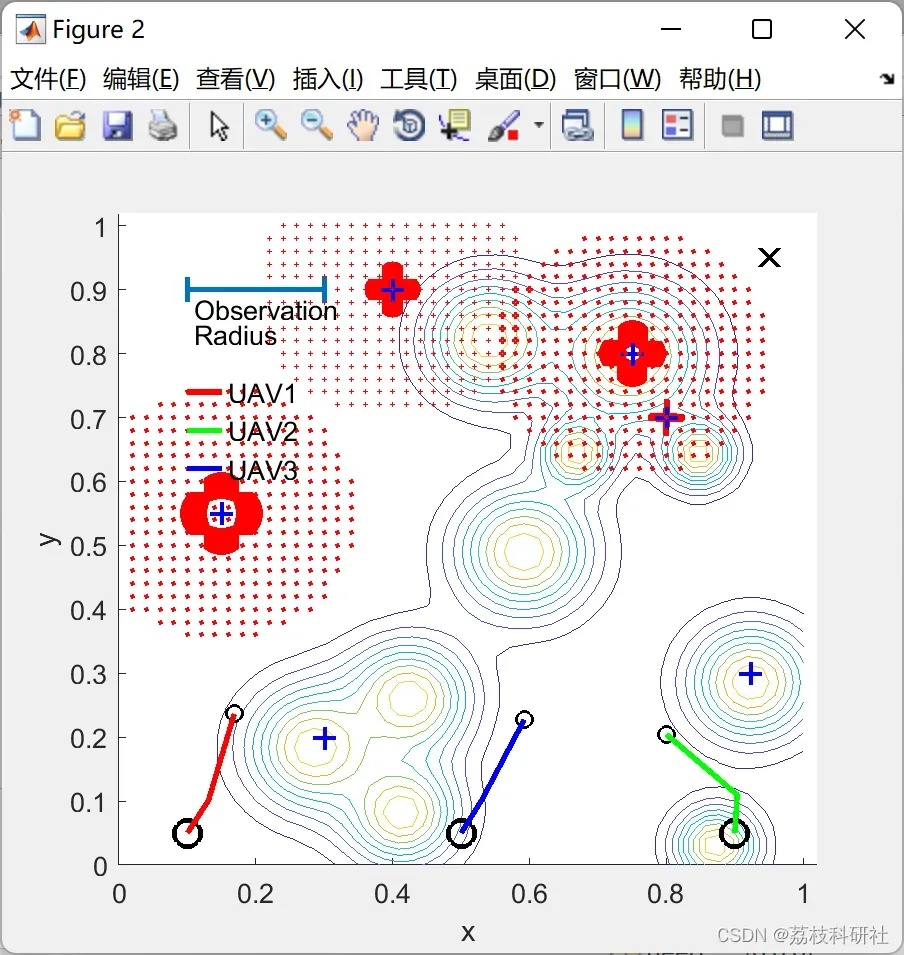
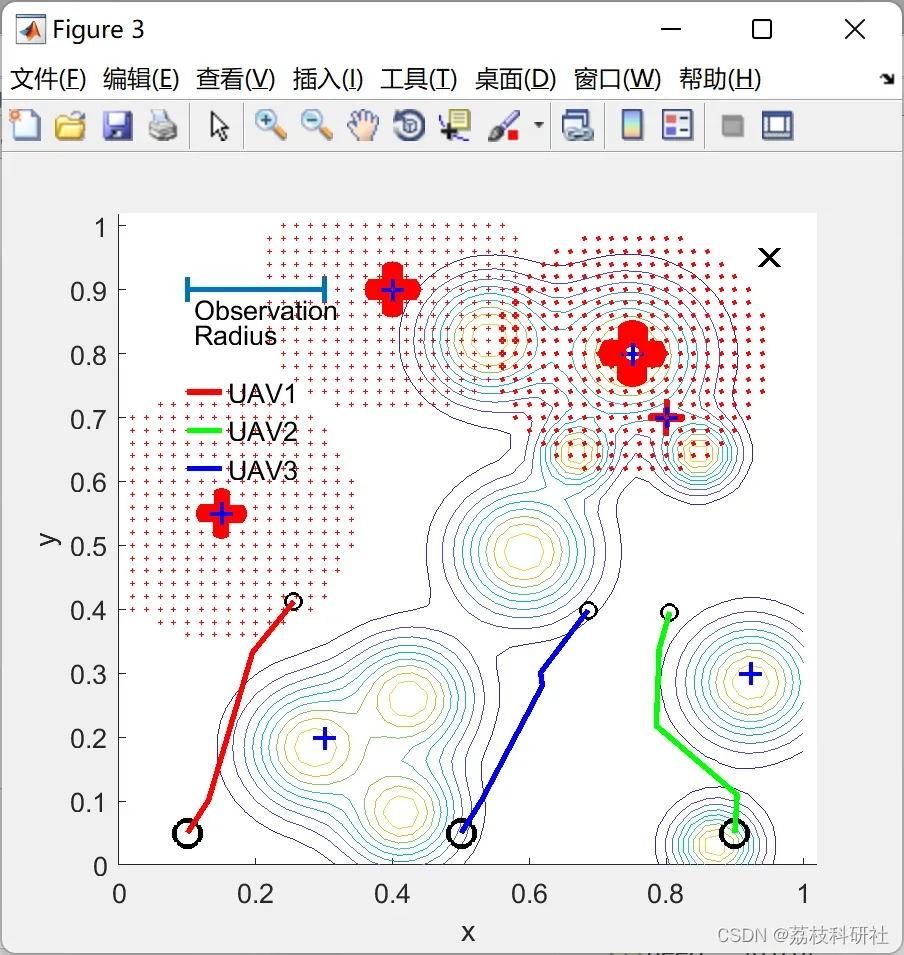
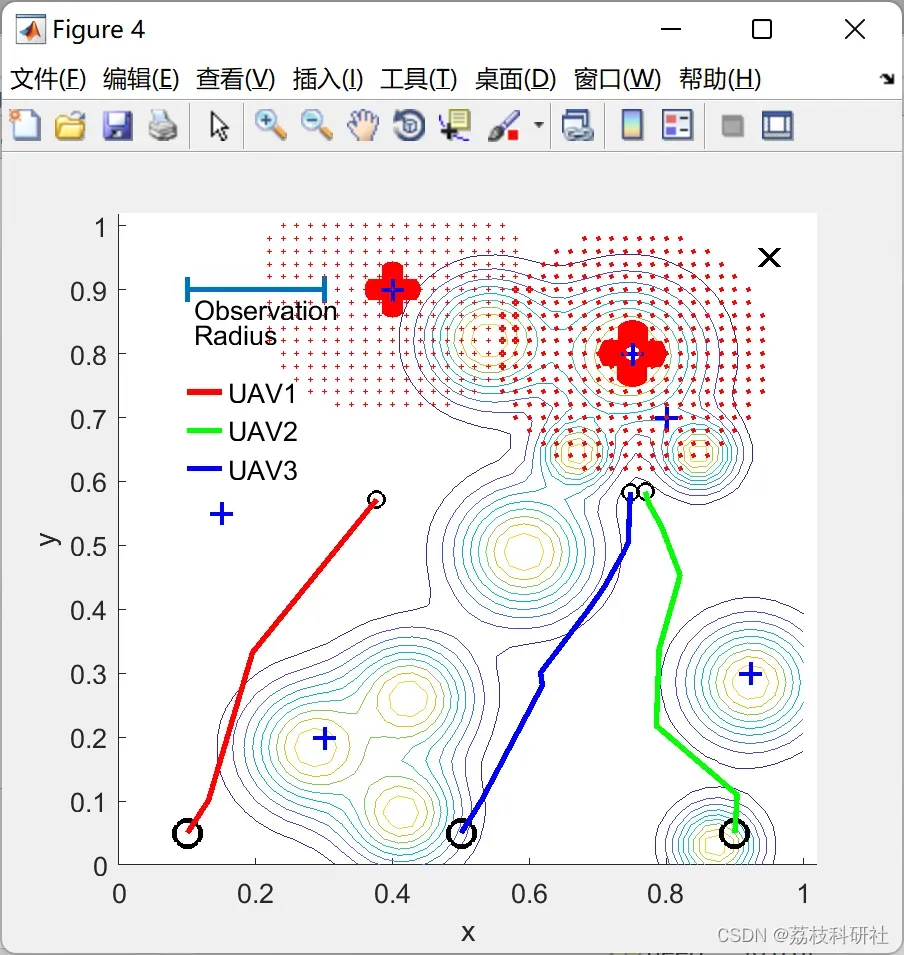
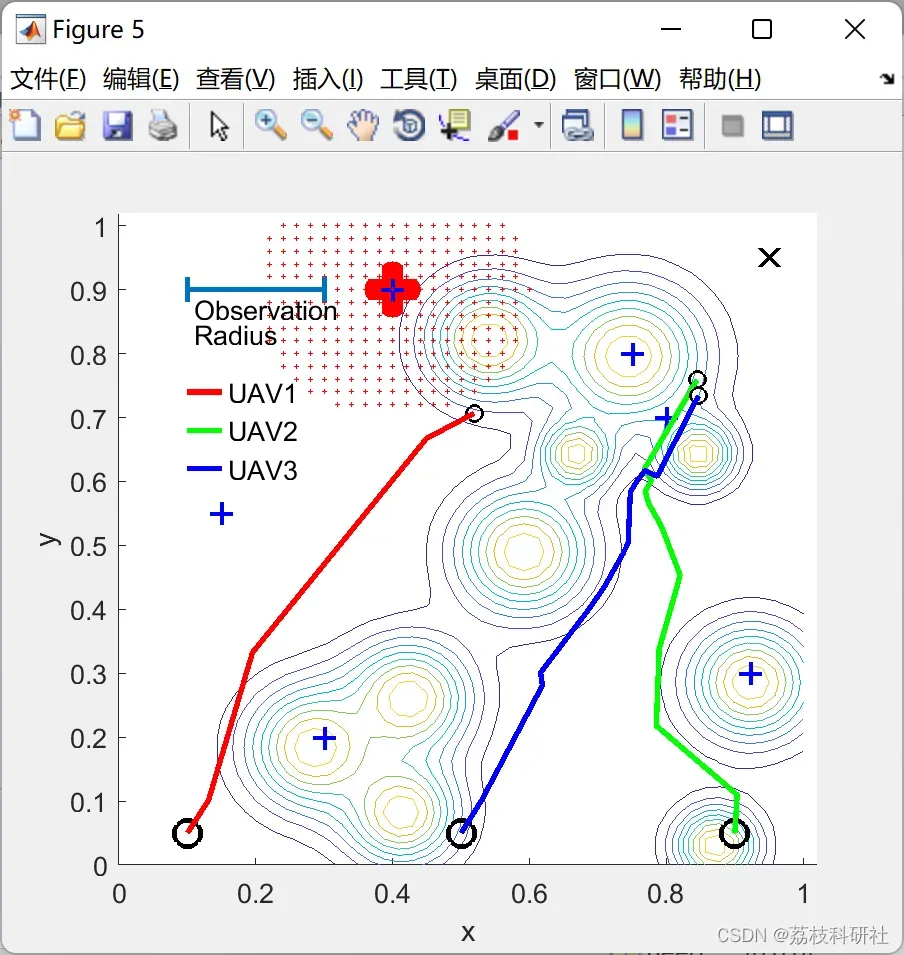
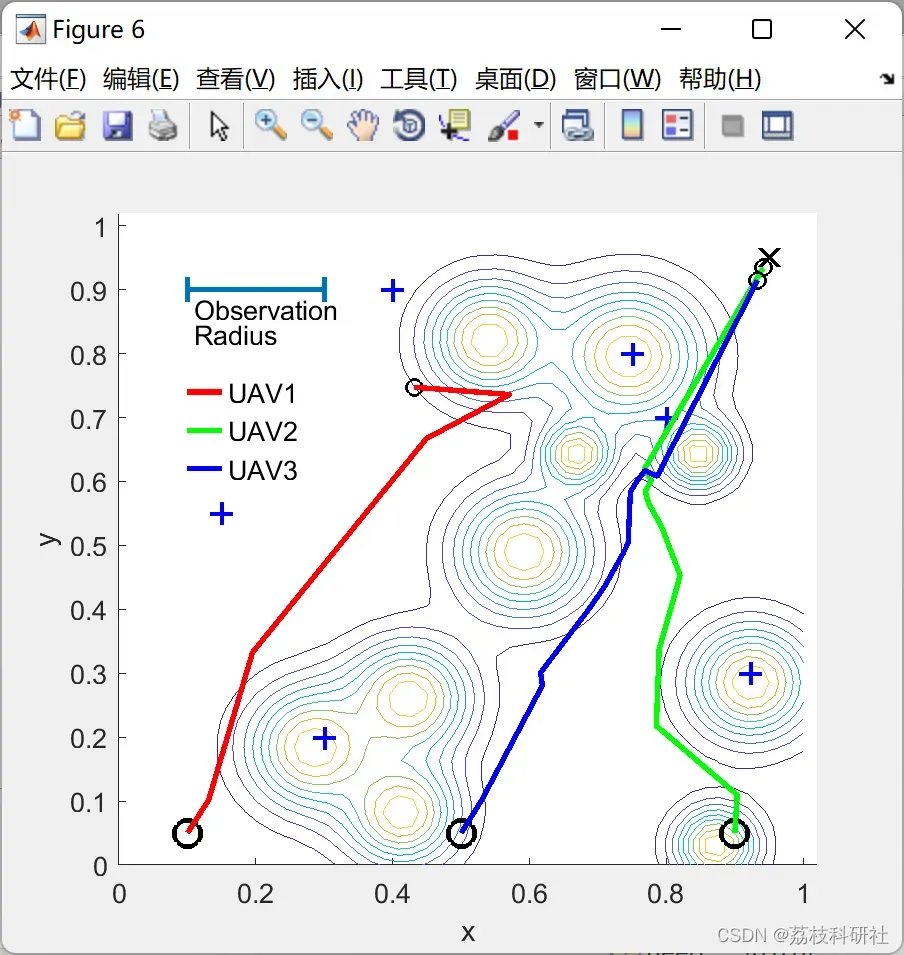
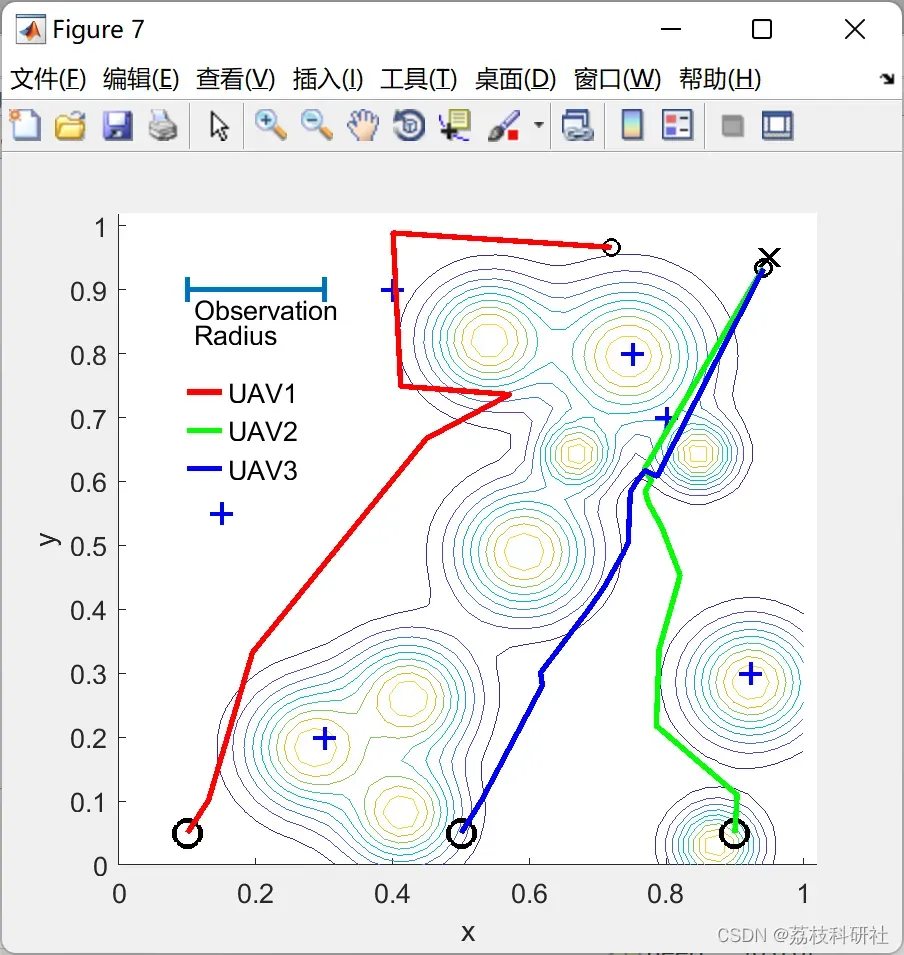
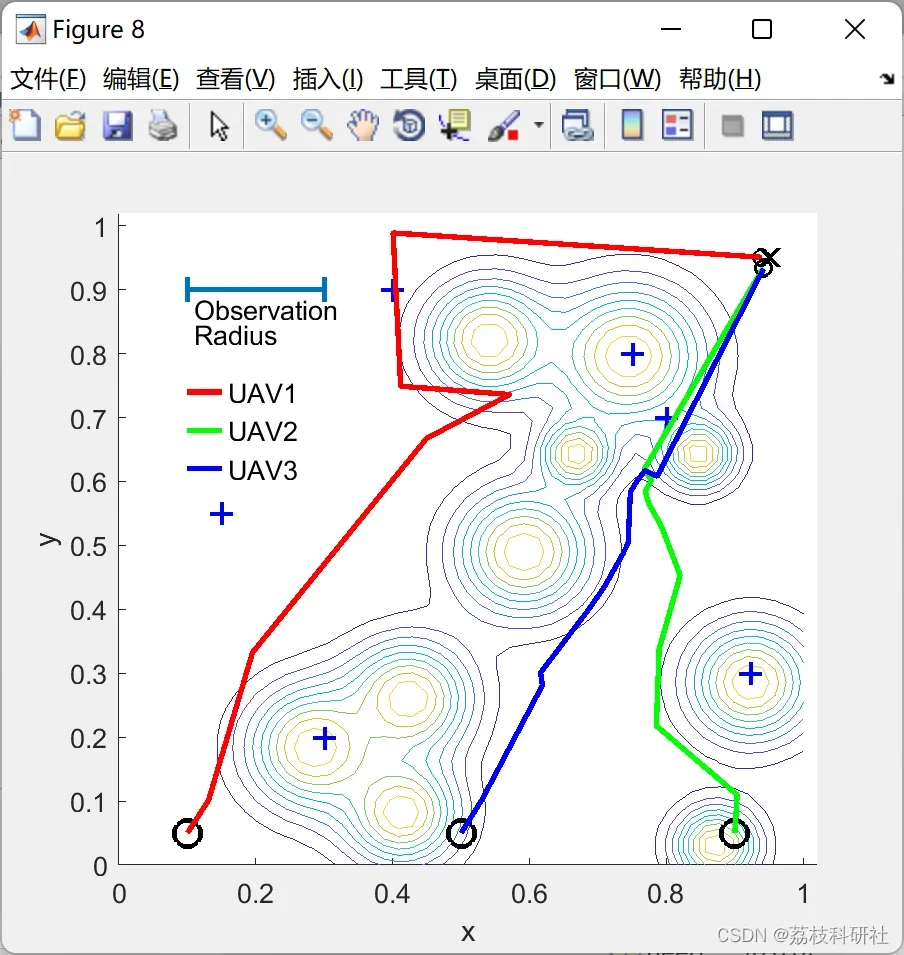
空中无人机(UAV)长期以来一直被用作移动网络中的网络处理器,但它们现在被用作移动边缘计算(MEC)中的移动服务器。由于它们的灵活性、可移植性、强大的视线通信联系以及低成本、可改变的使用,它们在研究和商业应用中变得更加流行。广泛的民用服务现在可能因其基本特性而得到支持,包括运输和工业监测、农业以及森林火灾和无线服务。本项目研究了基于无人机的移动边缘计算网络,其中无人机(UAV)进行移动终端用户向其提供的计算。为了确保每个TU的服务质量(QoS),UA V基于移动TU的位置动态选择其路线。
📚2 运行结果
 部分代码:
部分代码:
function TU_demand_matrix = TU_demand_linear
%% parameters
global N2;
global TU_info;
global SERVICE_RADIS;
global n;
global B;
%% Normalize
maxDemand=max(TU_info(:,3));
minDemand=min(TU_info(:,3));
%% Calculate accumulated TU_info service demand matrix
TU_demand_matrix=zeros(N2,N2); %initial T as N2*N2 0 matrix
for x=1:N2 %for point (x,y) in N2*N2, summrize demand from TU_info with in SERVICE_RADIS, return T
for y=1:N2
sum=0;
for i=1:size(TU_info,1)
if norm([x/N2,y/N2]-TU_info(i,1:2))<= SERVICE_RADIS
sum=sum+(TU_info(i,3)-minDemand)/(maxDemand-minDemand);
end
end
TU_demand_matrix(x,y)=sum;
end
end
end
🎉3 文献来源
部分理论来源于网络,如有侵权请联系删除。
🌈4 Matlab代码及文章讲解
文章出处登录后可见!