目录
传统的机器视觉通常包括两个步骤:预处理和物体检测。而沟通二者的桥梁则是图像分割(Image Segmentation)。图像分割通过简化或改变图像的表示形式,使得图像更易于分析。简单的图像分割方法是二值化(Binarization)。图像是由矩阵构成,矩阵中每个点的RGB值都不一样,呈现出来的色彩不一样,最终整体呈现给我们的就是一张彩色的图像。所谓”二值化处理“就是将矩阵中每个点的RGB值(0,0,0)或者(255,255,255)。
由于二值图像数据足够简单,许多视觉算法都依赖二值图像。通过二值图像,能更好地分析物体的形状和轮廓。二值图像也常常用作原始图像的掩模(又称遮罩、蒙版,Mask):它就像一张部分镂空的纸,把我们不感兴趣的区域遮掉。进行二值化有多种方式,其中最常用的就是采用全局阈值法、自适应阈值法、OTSU二值化等方法进行二值化。本文对于基于python来实现多种方式的二值化。
1、全局阈值法
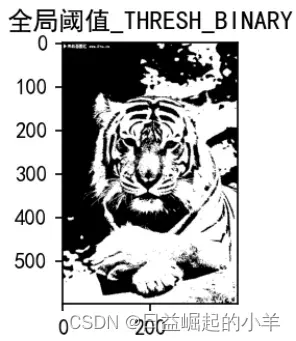
简单阈值是选取一个全局阈值,然后把整幅图像分成非黑即白的二值图像,灰度值大于阈值就赋为255反之为0。
1.1主要函数:
ret,mask = cv2.threshold(a,b,c,d)
参数一a: 初始图像
参数二b:我们自己设定的阈值
参数三c: 当图像像素置超过我们的设定的阈值时赋为255
参数四d : 我们设定的二值化类型
返回值一: 阈值,(Otsu‘s二值化会用到)
返回值二: 处理以后的图像
其中参数四的二值化类型有以下五种:
| 类型 | <阈值 | >阈值 |
| THRESH_BINARY | 置0 | 置填充色 |
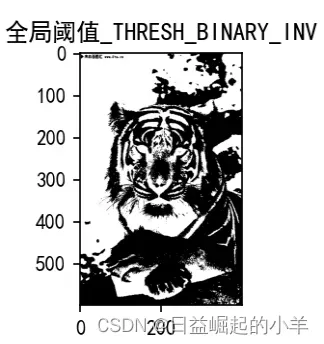
| THRESH_BINARY_INV | 置填充色 | 0 |
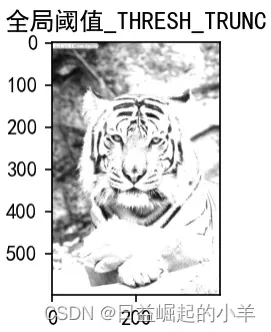
| THRESH_TRUNC | 保持原色 | 置灰色 |
| THRESH_TOZERO | 置0 | 保持原色 |
| THRESH_TOZERO_INV | 保持原色 | 置0 |
| THRESH_MASK | ||
| THRESH_OTSU | 利用OTSU方法寻找合适的阈值 | |
1.2全局阈值的代码实现
ret, mask_all = cv2.threshold(src=img, # 要二值化的图片
thresh=127, # 全局阈值
maxval=255, # 大于全局阈值后设定的值
type=cv2.THRESH_BINARY)# 设定的二值化类型,
print("全局阈值的shape: ", mask_all.shape)
plt.subplot(2, 2, 2)
plt.imshow(mask_all, cmap='gray')
plt.show()
plt.title("全局阈值")1.3特点
对整幅图像都是用一个统一的阈值来进行二值化,方法简单易于实现。但是对光照不均匀的图像容易出现错误的二值分割。
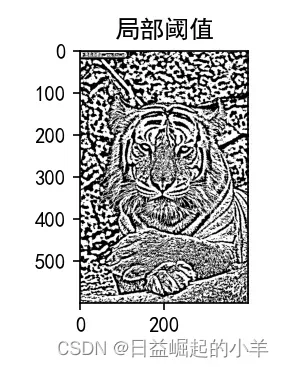
2、自适应阈值法
自适应阈值法的原理就是将像素点与该点所在区域的像素的平均值(最大值、中位数等)做比较,大于则赋予255;反之,为0。
2.1主要函数:
h2 = cv.adaptiveThreshold(a,b,c,d,e,f)
返回值: 处理后返回的图像
参数一a: 原始图像
参数二b:像素值上限
参数三c:自适应方法
- cv2.ADAPTIVE_THRESH_MEAN_C :领域内均值
- cv2.ADAPTIVE_THRESH_GAUSSIAN_C :领域内像素点加权和
参数四:赋值方式(参考全局阈值中介绍的表格)
参数五:设定方阵的大小,将一个点与其周围的方阵数据对比,合适的方阵大小对于结果的影像较大。
参数六:常数,每个区域计算出的阈值的基础上在减去这个常数作为这个区域的最终阈值,可以为负数。
2.2实现代码:
mask_local=cv2.adaptiveThreshold(src=img, # 要进行处理的图片
maxValue=255, # 大于阈值后设定的值
adaptiveMethod=cv2.ADAPTIVE_THRESH_MEAN_C,# 自适应方法
thresholdType=cv2.THRESH_BINARY, # 同全局阈值法中的参数一样
blockSize=11, # 方阵(区域)大小,
C=1) # 常数项,
print("局部阈值的shape: ", mask_local.shape)
plt.subplot(2, 2, 3)
plt.imshow(mask_local, cmap='gray')
plt.show()
plt.title("局部阈值")2.3特点:
在同一幅图像上的不同区域采用的是不同的阈值,从而使我们能在亮度不同的情况下得到更好的结果。
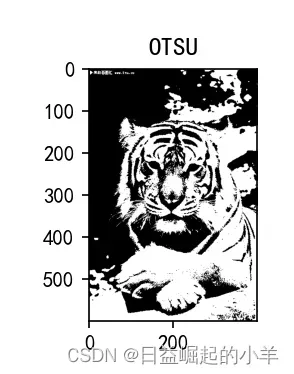
3、OTSU二值化(最大类间方差法)
Otsu算法(大津法或最大类间方差法)使用的是聚类的思想,把图像的灰度数按灰度级分成2个部分,使得两个部分之间的灰度值差异最大,每个部分之间的灰度差异最小,(相当于类间保持差异性,类内保持一致性)通过方差的计算来寻找一个合适的灰度级别来划分。 所以可以在二值化的时候采用otsu算法来自动选取阈值进行二值化。otsu算法被认为是图像分割中阈值选取的最佳算法,计算简单,不受图像亮度和对比度的影响。因此,使类间方差最大的分割意味着错分概率最小。
3.1实现代码:
ret2,mask_OTSU=cv2.threshold(img,0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)
print("OTSU的shape: ", mask_OTSU.shape)
plt.subplot(2, 2, 4)
plt.imshow(mask_OTSU, cmap='gray')
plt.title("OTSU")
plt.show()3.2特点
类间方差法对噪音和目标大小十分敏感,它仅对类间方差为单峰的图像产生较好的分割效果。当目标与背景的大小比例悬殊时,类间方差准则函数可能呈现双峰或多峰,此时效果不好,但是类间方差法是用时最少的。
4、实例展示

参考文献:
https://blog.csdn.net/qq_36686437/article/details/120682663
https://numpy.org/doc/stable/reference/generated/numpy.hstack.html
https://zhuanlan.zhihu.com/p/360824614
https://blog.csdn.net/jjddss/article/details/72841
https://blog.csdn.net/li_l_il/article/details/86767790
https://blog.csdn.net/JNingWei/article/details/77747959
https://blog.csdn.net/weixin_35732969/article/details/83779660
文章出处登录后可见!