边缘检测简介
边缘检测是图像处理和计算机视觉中的一个基本问题。边缘检测的目的是识别数字图像中亮度变化明显的点。图像边缘检测大大减少了数据量,去除了不相关的信息,并保留了图像的重要结构属性。
一、边缘检测步骤
1.图像获取
2.图像滤波
3.图像增强
4.图像检测
5.图像定位
二、Canny
1.函数
void Canny(InputArray image, OutputArray edges,
double threshold1, double threshold2,
int apertureSize = 3, bool L2gradient = false);
image 8位输入图像
edges 单通道8位图像
threshold1 迟滞过程第一个阈值
threshold2 迟滞过程第二个阈值
apertureSize 算子的孔径大小
L2gradient 范数
2.代码
#include<iostream>
#include<opencv.hpp>
using namespace std;
using namespace cv;
int main()
{
Mat img1;
img1 = imread("图片1.png", 0);
imshow("原图", img1);
Canny(img1, img1,10, 10);
imshow("Canny", img1);
waitKey(0);
}
效果如下: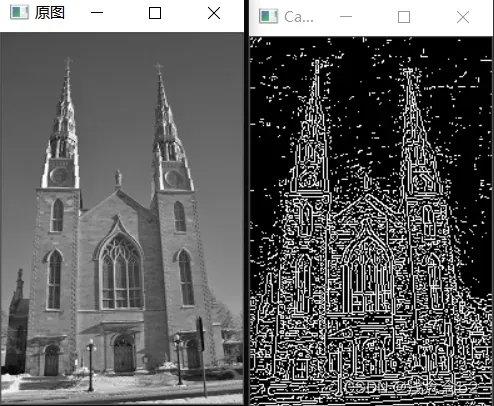
二、Sobel
1.函数
void Sobel(InputArray src, OutputArray dst, int ddepth,
int dx, int dy, int ksize = 3,
double scale = 1, double delta = 0,
int borderType = BORDER_DEFAULT);
src 输入
dst 输出
ddepth 输出图像的数据类型
dx x方向的差分阶数
dy y方向的差分阶数
Ksize 尺寸 1,3,5,7
scale 缩放因子
delta 偏值
borderType 边界像素模式
2.代码
int main()
{
Mat img1, img2;
img1 = imread("图片1.png", 0);
imshow("原图", img1);
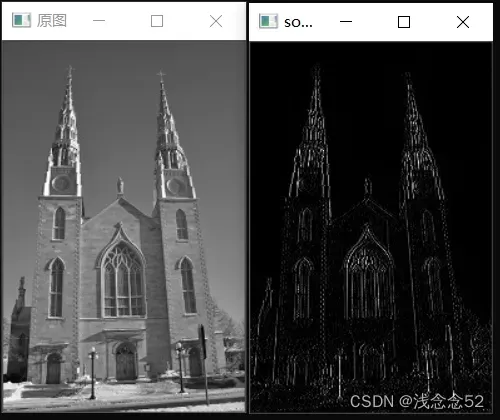
Sobel(img1, img2, CV_8U, 2,0,1);
imshow("sobel", img2);
waitKey(0);
}
效果如下:
三、Scharr
1.函数
void Scharr(InputArray src, OutputArray dst, int ddepth,
int dx, int dy, double scale = 1, double delta = 0,
int borderType = BORDER_DEFAULT);
src 输入
dst 输出
ddepth 输出图像的数据类型
dx x方向的导数
dy y方向的导数
scale 缩放因子
delta 偏值
borderType 边界像素模式
2.代码
int main()
{
Mat img1, img2;
img1 = imread("图片1.png", 0);
imshow("原图", img1);
Scharr(img1, img2, CV_8U, 1, 0);
imshow("Scharr", img2);
waitKey(0);
}
效果如下: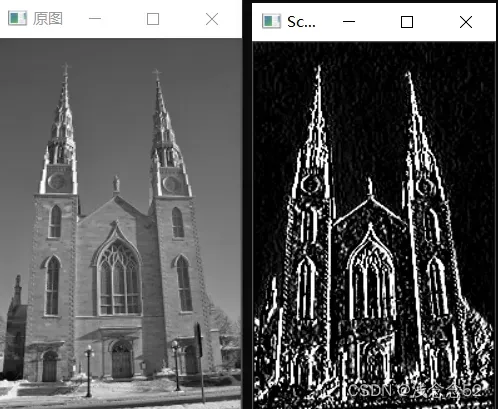
三、Scharr
1.函数
void Laplacian(InputArray src, OutputArray dst, int ddepth,
int ksize = 1, double scale = 1, double delta = 0,
int borderType = BORDER_DEFAULT);
src 输入
dst 输出
ddepth 输出图像的数据类型
Ksize 滤波器大小 正奇数
scale 缩放因子
delta 偏值
borderType 边界像素模式
2.代码
int main()
{
Mat img1, img2;
img1 = imread("图片1.png", 0);
imshow("原图", img1);
Laplacian(img1, img2,CV_8U,1);
imshow("Laplacian", img2);
waitKey(0);
}
效果如下: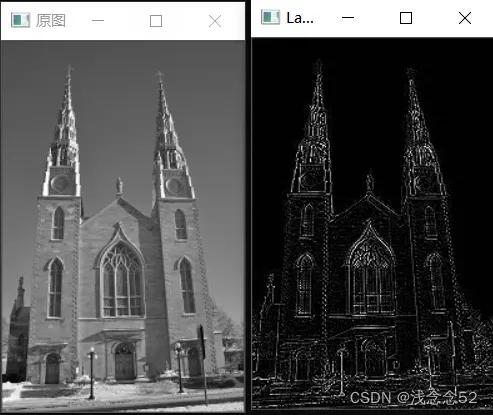
总结
本文只简单介绍几种常用的边缘检测算法函数,统称为函数来解决问题。您可以更深入地研究数学边缘检测算法。
文章出处登录后可见!
已经登录?立即刷新