TRO2022: A Two-Stage Optimization-Based Motion Planner for Safe Urban Driving
Summary: 探讨planning过程中的优化问题求解,收敛的不确定性和求解的质量研究;转为混合证书整数优化问题作为非线性的初值,然后使得非线性问题能得到较高收敛率和较高效率
Type: TRO
Year: 2022
引用量: 5
参考与前言
论文链接:
A Two-Stage Optimization-Based Motion Planner for Safe Urban Driving
代码链接:无
b站讲解:【看完了 觉得很清晰 值得一看】
学术论文上B站:2022TRO-自动驾驶运动规划_哔哩哔哩_bilibili
本文相关非常细节的公式推导就不详细推了,因为坐标转换挺多的,主要就是指明一下各个部分的意义;整体说清晰吧 也很清晰,但是说复现吧 总觉得不太行 hhh,所以吴院说的对:不开源的都跳过 hhhh
CSDN 链接(以免相关发布地方有些乱码问题):Kin-Zhang 论文阅读 CSDN
博客园链接:Kin-Zhang 论文阅读 cnblog
1. Motivation
因为本身运动规划问题的约束就是存在优先级差异的,比如安全性和运动能力肯定要大于舒适性和能耗之类的。所以对前者用的硬约束,后者则用软约束;两个阶段由 阶段一找到较好的初解,阶段二进行收敛到转换任务后的全局最优解
Contribution
论文写的非常简单,主要贡献点就在构建和如何求解
- 提出了应该怎样构建motion planning问题,并使用two-stage进行优化求解
- 实验证明此方法可以有高收敛率 和 lower cost solution
2. Method
第一阶段:将前面定义好的非线性问题 进行转换 成为混合整数优化问题,此部分用Gurobi 8.1进行求解
第二阶段:使用第一阶段给出的结果作为初值,解非线性优化问题,此部分用IPOPT进行求解
2.1 框架
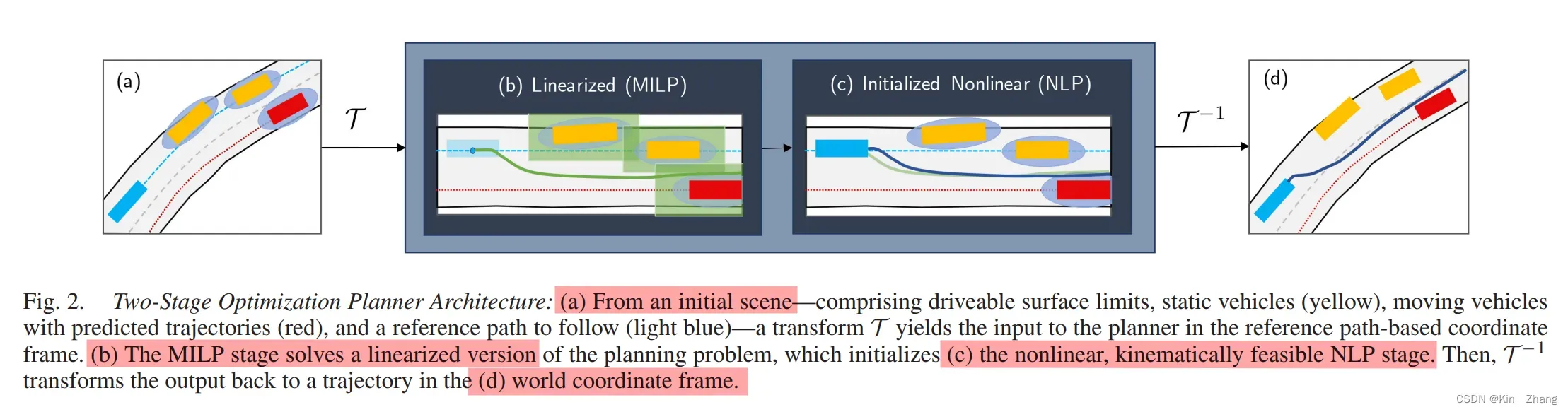
2.2 motion synthesis
这一部分主要是构建完整的问题形式,介绍了参考线坐标系和时间坐标系之间的相互转换;相关公式简单解释一下
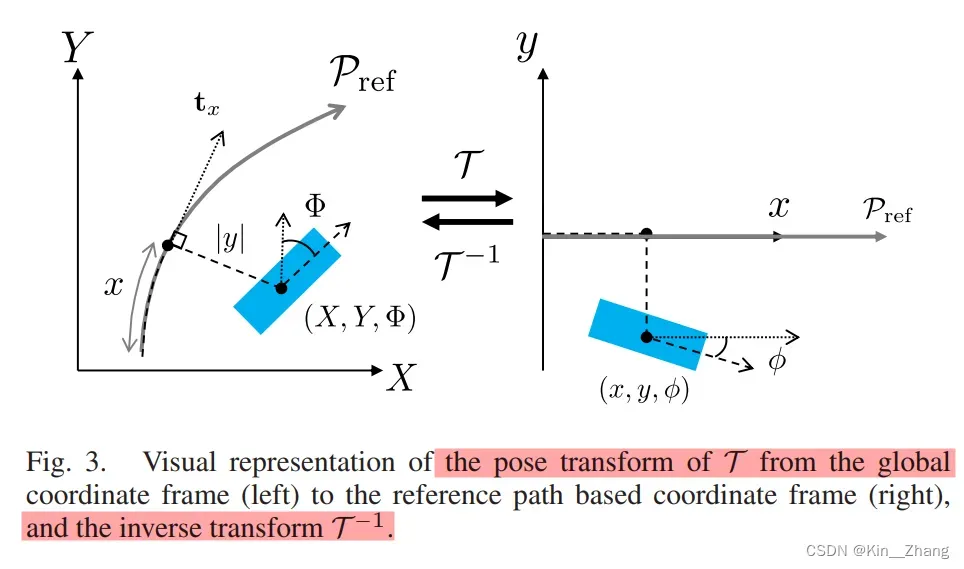
注意可能习惯了frenet坐标系会有些弄混,这里的大X, Y是世界坐标系,小x, y是参考线坐标系(其实我感觉就是frenet frame)
这是参考线下的正切和法向量,其中 是指从参考线的起点,车沿着参考线走的距离 其实就是图三左边的小x,只是因为泛化公式所以引入了
,正切是相对于世界坐标系的,所以是大X, Y各自对参数的导数,类似于
这样的感觉,法向量是因为和正切是垂直的 也就是点乘为0,所以就可以得到法向量长这样了
公式一的书写主要是为下面的坐标之间的转换做准备,即使用正切和法向量来转到 小x, y下
一共有三个转换:pose transform, speed transform, covariance tranform
pose 包含 其中有些惊讶的是 x是通过约束求的,即找最小的
让点的欧式距离最小
- 不过一般的x都是直接通过for循环找到的(不断step 递进),这里难道是放在约束问题里嘛?
其中y 则是 即 一个从参考线点指向车中心的向量,然后乘法向量就是参考线坐标系下的y啦,公式也就是:
关于covariance呢则是因为每个障碍物都是有pose和协方差的,也就是此文考虑了预测/检测存在的不确定性 并放入约束中;其中不确定性考虑是参考:论文[24] Safe nonlinear trajectory generation for parallel autonomy with a dynamic vehicle model 里的图,如下
整个问题的公式是这样的:
其中 最小化的是cost funtion由下面部分进行详细定义 与车位置和control有关;约束解释:
- 在任意的k从0,N是指N个离散step下
- 是指从时间k的状态
当输入
时 即加速度和转向角度,变成的下一个状态
的dynamical system
- 在状态所占据的空间面积
和不安全的面积area为空集,即两者面积不相交
- 是根据上述论文[24] 里每一个障碍物都有一个不确定的包围圈,对于障碍物i,其概率协方差为
,预测占据面积概率大于
也和自身的状态所占据的空间为空集,即不相交
2.3 MILP and Optimization
在2.2里面我们已经把问题定义清楚了,但是还缺乏各个部分的详细公式,这个部分主要就是简化相关的步骤,给出更为详细版的约束,构建的成为的是NLP(非线性问题)主要是以下四个部分,和求解部分一起看,更简洁点
- kinematic vehicle model
- driveable area collision
- traffic participnats’ collision
- multiobjective cost function over soft constraints
然后把问题就转成了problem 3 (Receding horizon MILP),虽然有点长:
问题不大,下面一个个解释一下
-
在k从m,m+K是指K个离散step下,应该满足一下约束
-
首先是常见的自行车模型 → 但实际上在后面说明了,求解时是直接看做质点 emmm ,所以呢大概是这样的:
-
然后 因为是质点 如果不加约束的话 那 v_y 速度过大就是横着走了 当然是不行的,所以呢 加了一个限制,其中
为常数, 假设
也就是不考虑调头
-
那为啥前面还写那么多自行车模型的 emmm 直接看后面这个部分,有没有前面铺垫丝毫不受影响
因为还是需要非线性的部分的,是problem 2 会用非线性求解器求解,转成MILP是提前得到一个大致的初解! 我悟了他的贡献点了
-
3-8 的约束全在加速度不能超过限制,速度不能超过限制,加加速度不能超限,就不过多解释了 emm 就是车都是有极限的 也不可能一脚油门 0.0001s就达到我们想要的300km/h的速度 这个意思
-
正常道路的行驶,也就是自身不碰到路沿,其中
为左路沿,当然假设
,其中d指的是车宽的,简单来讲虽然我们看做了一个质点,但是计算碰撞的时候 还是看做一个长方形,然后奔着最大的那个对角线去,
-
这个公式有些稍稍难解释,我们回到刚刚的图五,我再copy进来
然后我们障碍物占据的空间,因为有协方差(所以是subset)其中
是指椭圆的公式哈 就是咱高中学的那种
然后我们要找到椭圆边框离车辆长方形最近的地方,
为 车辆中心点 x,y 以车身长方形外扩的部分size
就是要满足,也就是说如果不在x范围内,他就一定不在y了,毕竟x是前后 如上图三坐标系
然后 我们用大-M 法,去得到对应的混合整数约束,也就是当M无穷大时,公式18 可以转为 19
最后则是我们的最小化对象 cost funtion:
其中是包含两个的,,其中w是权重哈
- 去向目标点的进度 也就是离目标点距离,比如目标点x纵向距离,速度是否达到,还有就是距离reference path的横向偏移:
- 则是乘客舒适度由加速度和转角度平方来算,比如
但实际上 我们将其也转换到了MILP:
其实吧 和上面的是差不多的,只是不是平方了 是绝对值…
- 后者则是仅加速度
至此,我们介绍完了… 终于求解用的是 K-step receding horizon 滚动时域? 也就是连续求解 N-K个子问题;
整体步骤再梳理一下:
- 构建完整问题,是一个非线性的问题
- 通过简化某些部分 比如车的模型,一些约束,来将问题转化为混合整数优化问题,然后通过连续求解 N-K 个子问题,得到初解,送到非线性问题里去
- 然后非线性求解器拿到初解,进行求解
!啊 我悟了… 所以主要贡献其实就是MILP的转换及求解,这么一看 妙啊… emmm
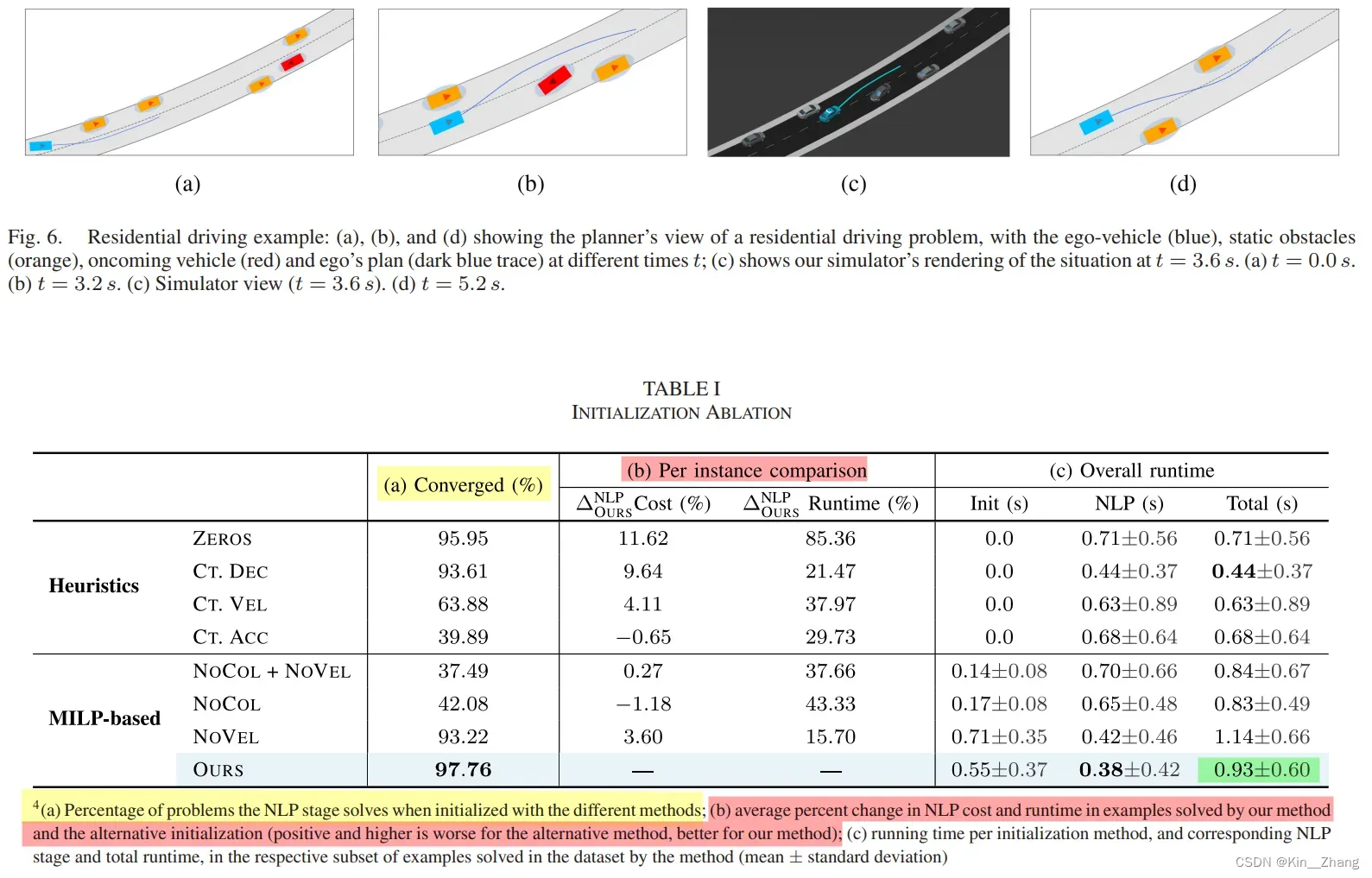
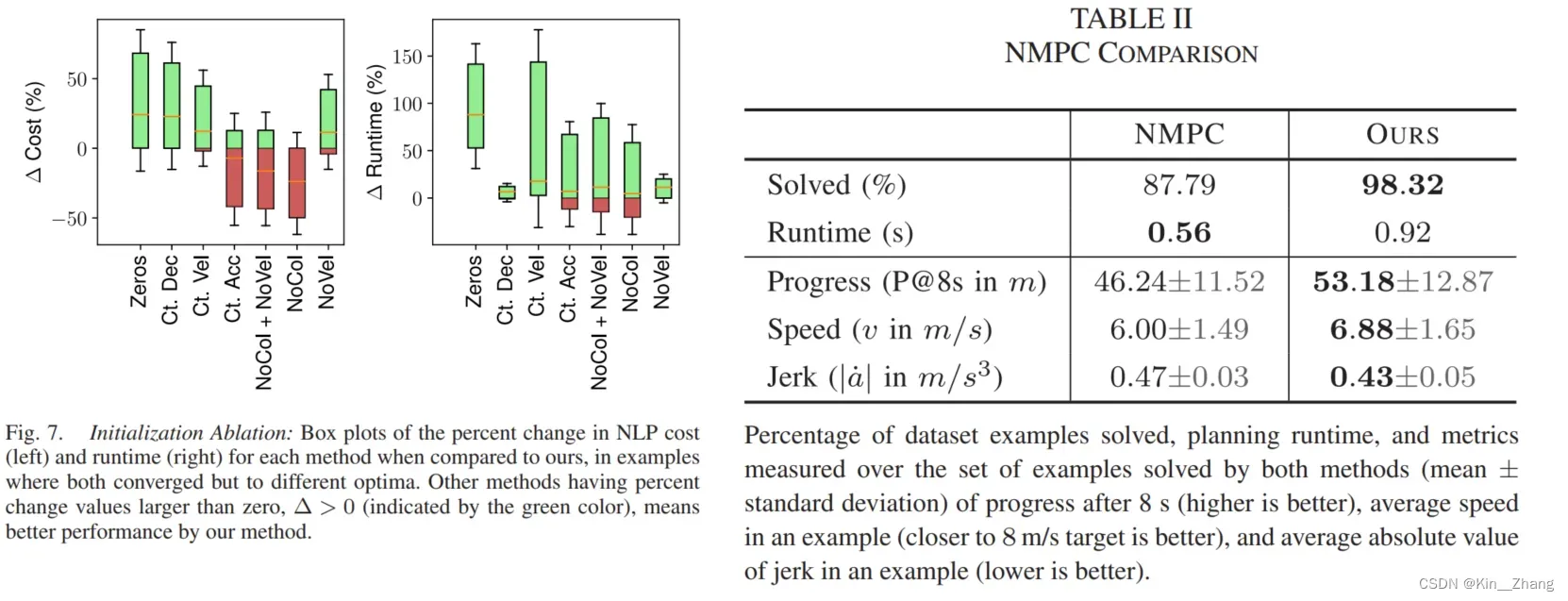
3. 实验及结果
当然实验部分就是证明:哎 我很快,哎 我的收敛率很高!
4. Conclusion
我看到了最后发现 哦吼related work原来在最后 hhhh!!!主要就是说明:哎 我们是第一个提出用混合整数优化问题作为NLP solver的warm-start的!
好的… 他承认了 yielding a comparable total runtime to our method 还是一个问题,主要是930ms 做不到真车实验吧… 不过应该是one cycle planning 一个周期的时间吧… 930ms真的还是太长了
碎碎念
-
关于实验设备没有细说,已发邮件询问
仔细看的时候;发现作者竟然都没提实验平台的硬件设置是怎样,就直接给出时间 作为TRO其实有点虎了… 一般对比时间都会给出实验平台的设备以便大家都进行大约的转化,就像学习领域说我在一个1030上训练2天,另一个说我只需要2小时,然后其实他是在一个3090上只需要2小时 hhh
-
时间对于planning这任务来说还是太长了,假设仅计算的一个周期,仅考虑planning的计算时间
给ab发这篇文章后,ab直接质问 这930ms的Planning耗时,搁谁谁能受得了 hhh,然后问了问实车正常 CPU i7-8700 16G内存,是得控制在100-300ms的响应时间的
再比如,jg做的GPIR 整体的运算周期也是在 10-100ms之间的
赠人点赞 手有余香 😆;正向回馈 才能更好开放记录 hhh
文章出处登录后可见!