前言
已知一个单位负反馈系统的开环传递函数,利用串联校正的方法使系统在校正相角裕度、超调量、调节时间达到设计指标。
一、设计任务
二、未校正前系统性能分析
1.校正前的频域分析
代码如下:
% MATALAB程序为:
num=[30];%%校正前传递函数
f1=[1,0];f2=[0.1,1];
f3=[0.04,1];
den=conv(f1,conv(f2,f3));
g1=tf(num,den)
figure(1); %第一个图 显示原系统的bode图
[mag,pha,w]=bode(g1);
margin(mag,pha,w)
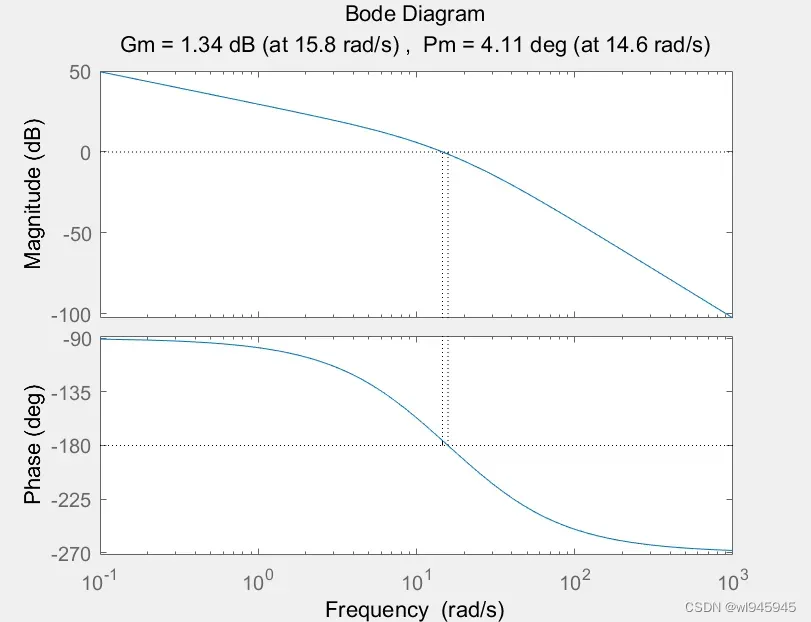
由图可知校正前系统的频域性能指标如下:
幅值裕度 =1.31; 穿越频率=15.8;
相角裕度=4.1°;
因为系统幅值裕度和相角均为正值,故系统在校正前出于稳定状态,穿越频率为14.6rad/s和相角裕度4.1°证明系统本身有着很大的相角裕度可以挖掘,故采用串联滞后校正。
2.校正前系统的时域分析
代码如下(示例):
%MATLAB程序:
num=[30];%%校正前传递函数
f1=[1,0];f2=[0.1,1];
f3=[0.04,1];
den=conv(f1,conv(f2,f3));
g1=tf(num,den)
figure(2);%%校正前系统的阶跃响应
step(feedback(g1,1))
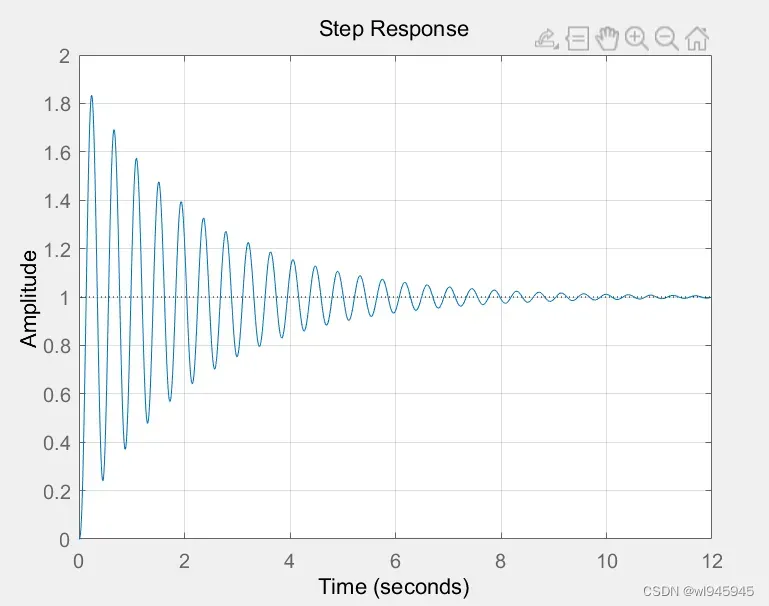
如图2中分析可的,校正前系统超调量为80%,调节时间约为6s,超出设计指标。
三、校正分析
3.1校正方案的选择
由图2的相频特性可以看出原系统的相角裕度很小,系统接近临界稳定,但原系统的穿越频率仍有很大余量,故采用串联滞后调节,滞后校正为系统带来了负的相移,但由于仍处于低频段,对系统的稳定裕量不会有大的影响。而由于新的截止频率前移,使对应的相角裕量还能有所增加,改善了原系统的动态性能,另外,串入滞后校正后,不但不影响稳态精度,还可以适当提高开环增益,进一步改善静态性能。因此采用串联滞后校正。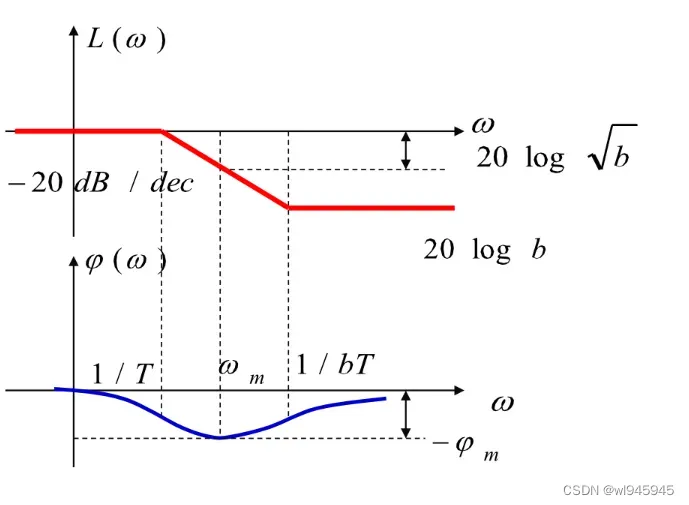
3.2校正函数的计算
由原系统bode图可知,此时相角裕量只有4.1°。现用滞后网络进行校正,目的是要增大相角裕量,若选择矫正后的幅值穿越频率为5.27rad/s,此时相角裕度可达到60°。这就意味着应设置一个滞后网络,把原系统在w=5.27rad/s处的幅频特性数值减小到零,并对此频率附近的相角曲线不产生明显影响,因为只有这样才能维持相角裕度为60°。但实际校正中,滞后网络在新的幅值穿越频率上也要产生一个不大的负相角,所以,实际的Wc要选的比5.27rad/s小一些,本设计中选择在相角裕度为55°处的频率4.5rad/s作为矫正后的幅值穿越频率。
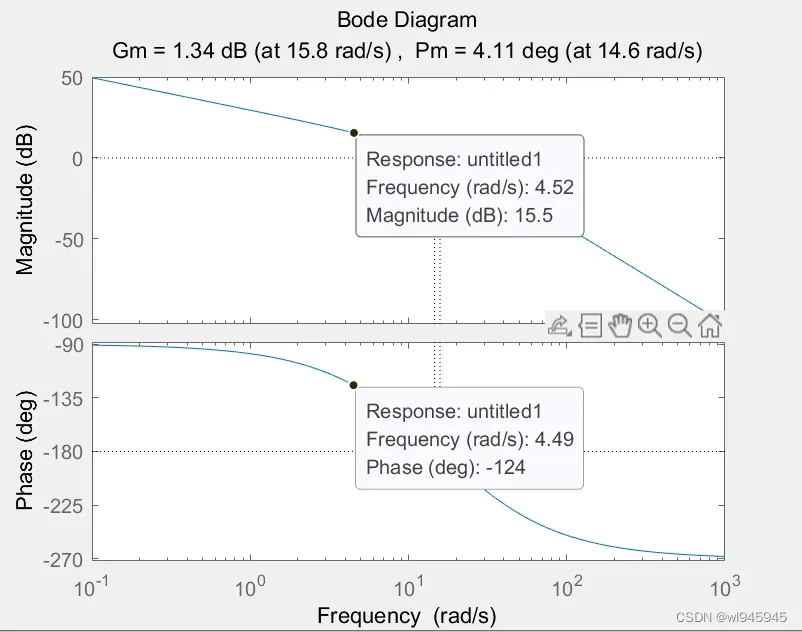
可以测量到,未校正系统在w=4.5rad/s处时的对数幅值为15.5dB,故滞后网络在频率w’=4.5rad/s上的幅频特性对数值应接近-16dB。这样才能使校正后系统在此频率的幅频特性对数值等于0dB,使4.5rad/s成为校正后系统的穿越频率。
滞后校正网络传递函数为;
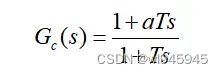
已知滞后网络对数幅值的最大值为20lga,原系统在w’=4.5rad/s上的对数幅值为

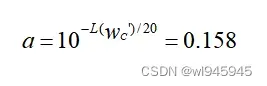
于是有:

求解得:
此时求出的a就是滞后网络两个转折频率的比值。为了使滞后网络对原系统在wc’处的相角不产生明显影响,选取
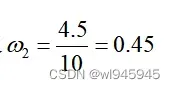
由aT=1/w2即可计算出T=14.06。
即校正网络函数为:
校正后系统的开环传递函数为

四、校正后的系统的性能分析
4.1校正后系统的频域分析
通过MATLAB绘制出校正后系统的bode图:
MATALAB程序为:
num=[66.6,30];%%校正后的传递函数
f1=[14.06,1,0];
f2=[0.1,1];
f3=[0.04,1];
den=conv(f1,conv(f2,f3));
g4=tf(num,den);
figure(4); %第一个图 显示原系统的bode图
[mag,pha,w]=bode(g4);
margin(mag,pha,w)
hold on
grid;
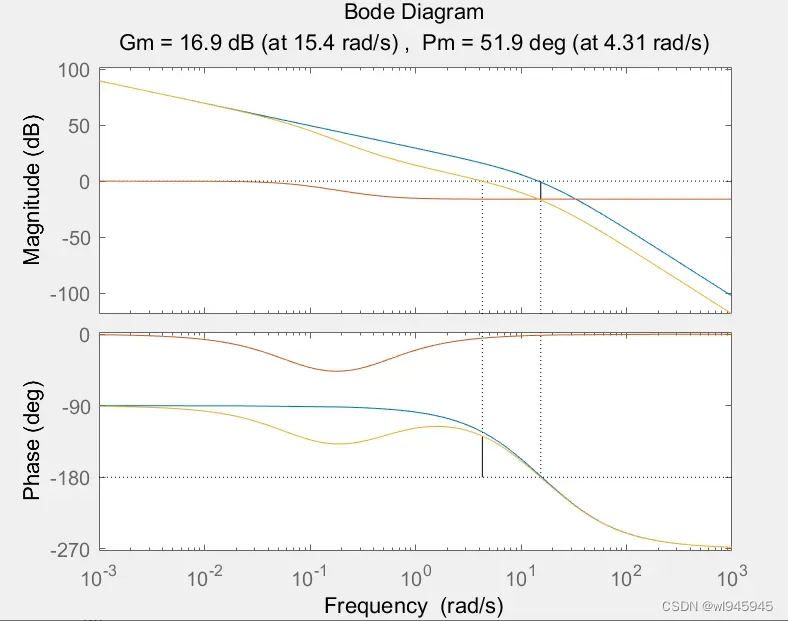
由图可知校正前系统的频域性能指标如下:
幅值裕度=16.9; 穿越频率=4.31;
相角裕度=51.9°;
满足相位裕度大于50°的设计要求,穿越频率大于3.5rad/s两个设计条件。
4.2校正后系统的时域分析
通过MATLAB绘制出校正后系统的阶跃响应图:
MATALAB程序为:
num=[66.6,30];%%校正后的传递函数
f1=[14.06,1,0];
f2=[0.1,1];
f3=[0.04,1];
den=conv(f1,conv(f2,f3));
g4=tf(num,den);
%阶跃响应
step(feedback(g4,1))
hold on
grid;
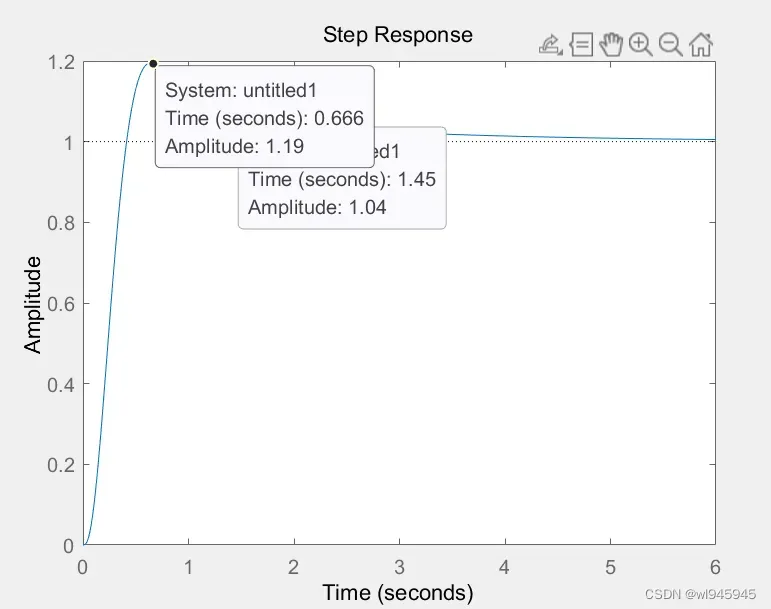
由MATLAB仿真得到的结果得出在误差为±5%范围内,超调量为19%,调节时间为1.45s,满足系统设计要求。
总结
通过本次课程设计主要掌握了对系统的校正的基本方法,先分析原系统的性能指标,再根据原系统的性能来选择校正方案,计算出校正函数的具体参数后,再通过仿真来验证参数是否设置正确以及校正后系统是否满足任务指标。不同的方案都具有不同的优劣性,都要根据原系统具体分析,很多参数的选择有时候并没有明确的计算公式,都是根据经验值来设定,这就需要我们根据仿真结果一步步的去调试最合适的参数.
对书本知识的掌握运用是一种收获,对于新知识新软件的快速学习和应用又是另一种收获,在海量的资料中快速精准的找到所需要的知识和操作并把它应用到自己的方案中,这在一定程度上提高了我独立学习和研究的能力。
文章出处登录后可见!