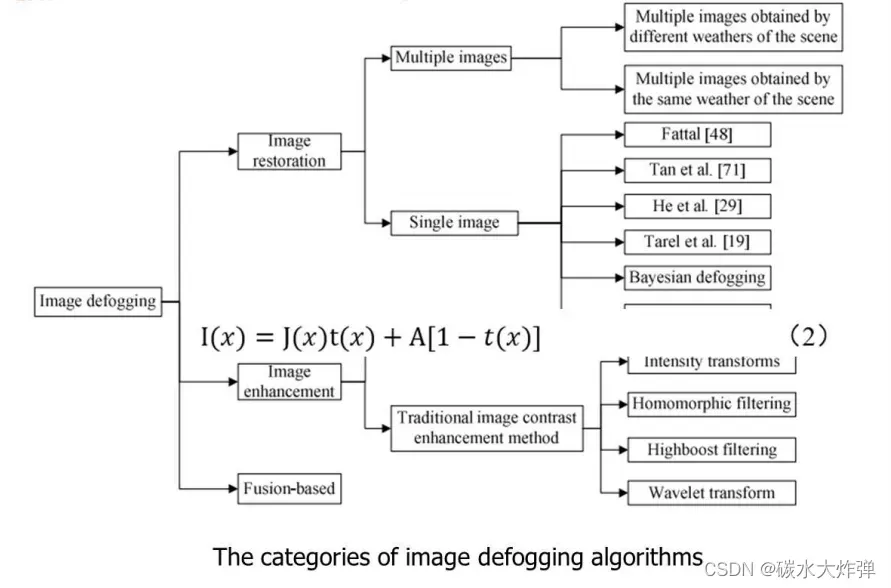
1、图像去雾算法分类:图像去雾分为图像恢复和图像增强,在图像恢复中又分为单图像去雾和多图像去雾,图像去雾中使用的物理模型是大气散射模型,可参考暗通道先验中对大气散射模型的解释。
2、与雾相关的特征
(1)暗通道先验:清晰图像块的RGB颜色空间中有一个通道很暗(数值很低甚至接近于零)。暗通道为局部区域中所有像素颜色的最小值::

暗通道先验可直接用于估计透射率t(x),t(x)正比于1-D(x)。
(2)最大化对比度:根据大气散射模型,图像的对比度因雾度而降低为 ,基于该观察,局部对比度是s×s局部pitch中像素强度相对于中心像素的方差,局部最大值为r×r区域r中的局部对比度值定义为C(x):
,基于该观察,局部对比度是s×s局部pitch中像素强度相对于中心像素的方差,局部最大值为r×r区域r中的局部对比度值定义为C(x):

通过最大化局部对比度来增强图像的可见性。
(3)颜色衰减:雾会导致图像饱和度的降低和亮度的增加,整体上表现为颜色的衰减。根据颜色衰减先验,亮度和饱和度的差值记为A(x),景深和A(x)成正比,所以A(x)可以用于估计透射率 :

(4)色调差异:原始图像I(x)与其半逆图像 (x)之间的色调差异已用于检测雾度,
(x)之间的色调差异已用于检测雾度,

对于无雾图像,其半逆图像的三个通道中的像素值不会全部翻转,从而导致(x)和I(x)之间的色调变化较大。色调差异特征被定义为:

上标“h”表示HSV颜色空间中图像的色调通道,透射率t(x)向H(x)反向传播。
3、DeHazeNet主要贡献
(1)F1层:Maxout激活函数学习与雾相关的特征;
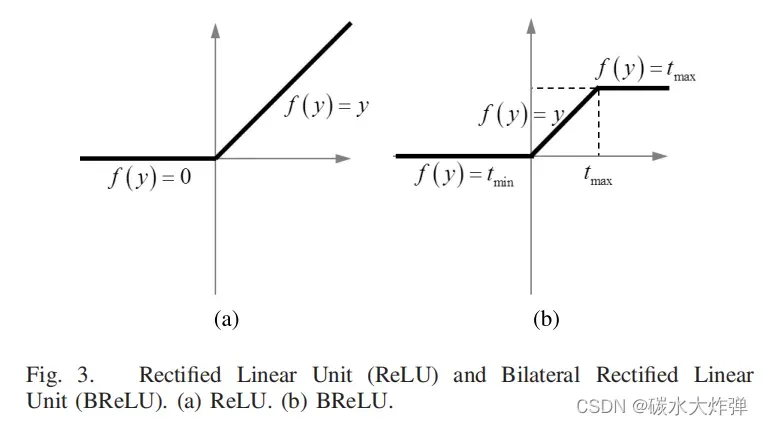
(2)F4层:用BReLu替代ReLu和Sigmoid函数,Sigmoid函数会出现梯度消失问题,导致收敛速度慢,ReLu函数更好的适用于分类问题而非回归问题,BReLu可以保持双边约束和局部线性来进行图像恢复,提高收敛性。
(3)端到端系统:输入是有雾图像,输出是其对应的透射率。
4、网络结构
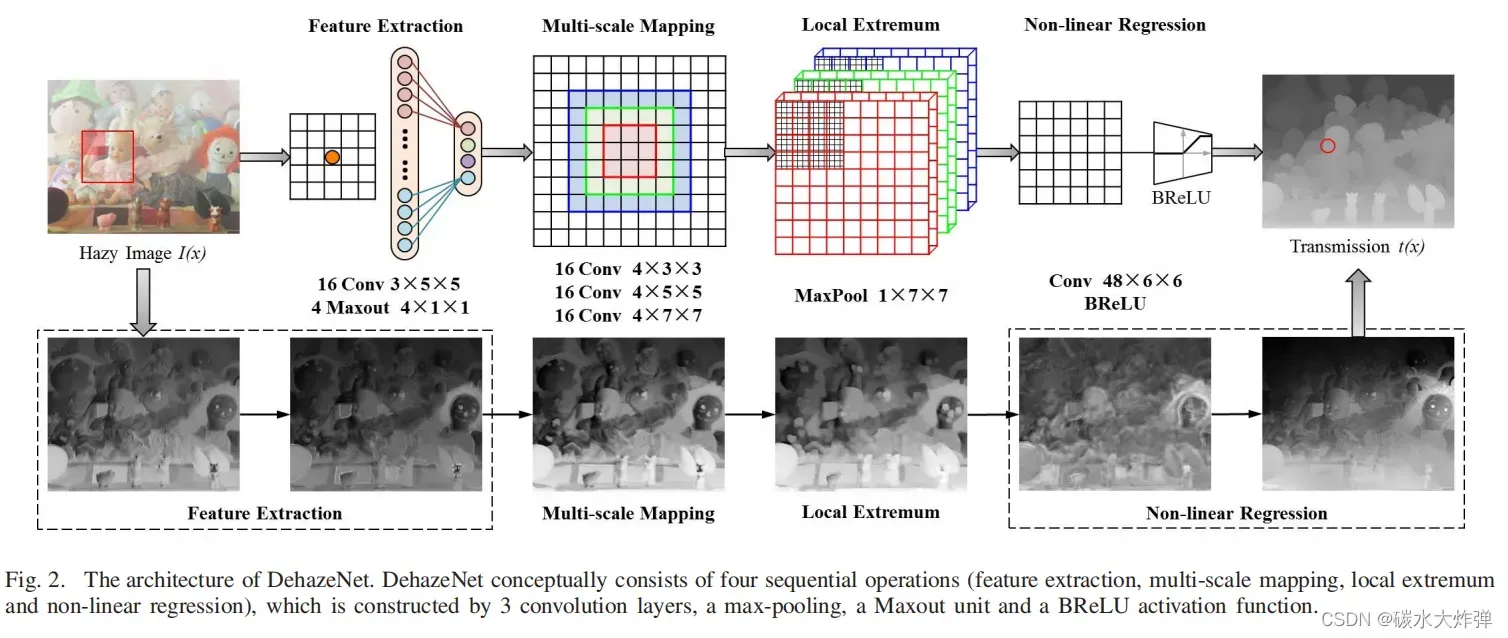
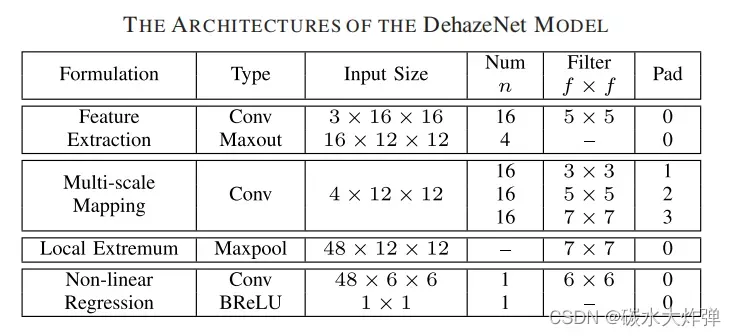
(1)F1特征提取层,即提取有雾图像特征。根据不同的假设与先验设计不同的滤波器。举的例子中有16个滤波器。其中每四个是上述一种先验特征滤波器。通过maxout unit的激活函数,每四个输出一张图。这里不padding,输入是3*16*16三通道的块。输出的是四个16*12*12,每一个代表一种特征。


(2)F2使用多尺度的平行卷积操作。由于多尺度特征被证明有利于去雾并且在inception的模型中也用到了平行卷积,即同一张图用不同尺度的卷积核进行卷积。分别用16个3*3、16个5*5和16个7*7的卷积核进行卷积,每一种尺度产生16个,并且通过padding每张图大小应该是一致的。总共获得48个48*10*10。

(3)F3Maxpooling对局部数据敏感,另外根据假设透射率有局部不变性,所以用一个7*7局部最大值滤波替代maxpooling。输出是48个48*6*6。

(4)通过1个4*4的卷积核,产生1*1的标量,并且使用的激活函数为BReLU。因为ReLU抑制了小于0的数,只适用于图像分类等方面,并不适合图像复原。因为最后的透射率图允许高于1或者低于0。所以提出了BReLU,既保持了局部线性,又保持了双边的限制。输出的是一个标量,即输入块中心点的透射率值。

5、与传统去雾方法的联系:DehazeNet的第一层特征F1设计用于有雾图像的特征提取。以暗通道先验为例,如果权重W1是一个相反的滤波器(在一个通道的中心有值为−1的稀疏矩阵),而B1是一个单位偏差,那么特征图的最大输出相当于颜色通道的最小输出,这类似于暗通道。同样,当权重为圆形滤波器时,F1与最大对比度相似;当W1包含全通滤波器和相反滤波器时,F1与最大和最小特征图相似,这是颜色空间从RGB到HSV转换的运算,然后提取颜色衰减和色调色差特征。

综上所述,在如上图所示的滤波器学习成功后,第2节中提到的与雾相关的特征可以从DehazeNet的第一层中提取出来。另一方面,Maxout激活函数可以看作是对任意凸函数的分段线性逼近。在本文中,在四个特征映射(k=4)中选择最大值来近似一个任意的凸函数。
6、训练细节:
(1)使用深度学习的方法去雾需要有ground truth,由于自然场景中有雾图像和无雾图像无法同时存在,所以使用合成数据集,故此算法对自然场景中的有雾图像效果不太好。
(2)合成数据过程:给定一个无雾图像J(x)、大气光α和一个随机透射率t∈(0,1),合成一个模糊图像为I(x)=J(x)t+α(1−t)。为了减少变量学习中的不确定性,将大气光α设置为1。
(3)损失函数:MSE损失函数,随机梯度下降

(4)图像去雾:网络训练完成之后,得到初始透射率,再通过引导滤波进行细化,然后根据大气散射模型复原图像。
7、待改进的地方
(1)把大气光α当成了全局常量,所以这个算法在雾度均匀的情况下比较好,在不均匀雾度下效果不太好;
(2)有雾图像和无雾图像之间可以直接进行端到端映射,而不用估计透射率。
8、python代码实现
import torch
import torch.nn as nn
from torch.utils.data.dataset import Dataset
from PIL import Image
import torchvision
from torchvision import transforms
import torch.utils.data as data
#import torchsnooper
import cv2
BATCH_SIZE = 128
EPOCH = 10
# BRelu used for GPU. Need to add that reference in pytorch source file.
class BRelu(nn.Hardtanh):
def __init__(self, inplace=False):
super(BRelu, self).__init__(0., 1., inplace)
def extra_repr(self):
inplace_str = 'inplace=True' if self.inplace else ''
return inplace_str
class DehazeNet(nn.Module):
def __init__(self, input=16, groups=4):
super(DehazeNet, self).__init__()
self.input = input
self.groups = groups
self.conv1 = nn.Conv2d(in_channels=3, out_channels=self.input, kernel_size=5)
self.conv2 = nn.Conv2d(in_channels=4, out_channels=16, kernel_size=3, padding=1)
self.conv3 = nn.Conv2d(in_channels=4, out_channels=16, kernel_size=5, padding=2)
self.conv4 = nn.Conv2d(in_channels=4, out_channels=16, kernel_size=7, padding=3)
self.maxpool = nn.MaxPool2d(kernel_size=7, stride=1)
self.conv5 = nn.Conv2d(in_channels=48, out_channels=1, kernel_size=6)
#self.brelu = nn.BReLU()
for name, m in self.named_modules():
# lambda : 定义简单的函数 lambda x: 表达式
# map(func, iter) iter 依次调用 func
# any : 有一个是true就返回true
if isinstance(m, nn.Conv2d):
# 初始化 weight 和 bias
nn.init.normal(m.weight, mean=0,std=0.001)
if m.bias is not None:
nn.init.constant_(m.bias, 0)
def Maxout(self, x, groups):
x = x.reshape(x.shape[0], groups, x.shape[1]//groups, x.shape[2], x.shape[3])
x, y = torch.max(x, dim=2, keepdim=True)
out = x.reshape(x.shape[0],-1, x.shape[3], x.shape[4])
return out
#BRelu used to CPU. It can't work on GPU.
def BRelu(self, x):
x = torch.max(x, torch.zeros(x.shape[0],x.shape[1],x.shape[2],x.shape[3]))
x = torch.min(x, torch.ones(x.shape[0],x.shape[1],x.shape[2],x.shape[3]))
return x
def forward(self, x):
out = self.conv1(x)
out = self.Maxout(out, self.groups)
out1 = self.conv2(out)
out2 = self.conv3(out)
out3 = self.conv4(out)
y = torch.cat((out1,out2,out3), dim=1)
#print(y.shape[0],y.shape[1],y.shape[2],y.shape[3],)
y = self.maxpool(y)
#print(y.shape[0],y.shape[1],y.shape[2],y.shape[3],)
y = self.conv5(y)
# y = self.relu(y)
# y = self.BRelu(y)
#y = torch.min(y, torch.ones(y.shape[0],y.shape[1],y.shape[2],y.shape[3]))
y = self.BRelu(y)
y = y.reshape(y.shape[0],-1)
return y
loader = torchvision.transforms.Compose([
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]),
])
augmentation = torchvision.transforms.Compose([
transforms.RandomHorizontalFlip(0.5),
transforms.RandomVerticalFlip(0.5),
transforms.RandomRotation(30),
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]),
])
class FogData(Dataset):
# root:图像存放地址根路径
# augment:是否需要图像增强
def __init__(self, root, labels, augment=True):
# 初始化 可以定义图片地址 标签 是否变换 变换函数
self.image_files = root
self.labels = torch.cuda.FloatTensor(labels)
self.augment = augment # 是否需要图像增强
# self.transform = transform
def __getitem__(self, index):
# 读取图像数据并返回
if self.augment:
img = Image.open(self.image_files[index])
img = augmentation(img)
img = img.cuda()
return img, self.labels[index]
else:
img = Image.open(self.image_files[index])
img = loader(img)
img = img.cuda()
return img, self.labels[index]
def __len__(self):
# 返回图像的数量
return len(self.image_files)
path_train = []
file = open('path_train.txt', mode='r')
content = file.readlines()
for i in range(len(content)):
path_train.append(content[i][:-1])
label_train = []
file = open('label_train.txt', mode='r')
content = file.readlines()
for i in range(len(content)):
label_train.append(float(content[i][:-1]))
#print(float(content[i][:-1]))
train_data = FogData(path_train, label_train, False)
train_loader = data.DataLoader(dataset=train_data, batch_size=BATCH_SIZE, shuffle=True, )
net = DehazeNet()
net.load_state_dict(torch.load(r'defog4_noaug.pth', map_location='cpu'))
#@torchsnooper.snoop()
def train():
lr = 0.00001
optimizer = torch.optim.Adam(net.parameters(), lr=0.0000005)
loss_func = nn.MSELoss().cuda()
for epoch in range(EPOCH):
total_loss = 0
for i, (x, y) in enumerate(train_loader):
# 输入训练数据
# 清空上一次梯度
optimizer.zero_grad()
output = net(x)
# 计算误差
loss = loss_func(output, y)
total_loss = total_loss+loss
# 误差反向传递
loss.backward()
# 优化器参数更新
optimizer.step()
if i % 10 == 5:
print('Epoch', epoch, '|step ', i, 'loss: %.4f' % loss.item(), )
print('Epoch', epoch, 'total_loss', total_loss.item())
torch.save(net.state_dict(), r'defog4_noaug.pth')
#train()
def defog(pic_dir):
img = Image.open(pic_dir)
img1 = loader(img)
img2 = transforms.ToTensor()(img)
c, h, w = img1.shape
patch_size = 16
num_w = int(w / patch_size)
num_h = int(h / patch_size)
t_list = []
for i in range(0, num_w):
for j in range(0, num_h):
patch = img1[:, 0 + j * patch_size:patch_size + j * patch_size,
0 + i * patch_size:patch_size + i * patch_size]
patch = torch.unsqueeze(patch, dim=0)
t = net(patch)
t_list.append([i,j,t])
t_list = sorted(t_list, key=lambda t_list:t_list[2])
a_list = t_list[:len(t_list)//100]
a0 = 0
for k in range(0,len(a_list)):
patch = img2[:, 0 + a_list[k][1] * patch_size:patch_size + a_list[k][1] * patch_size,
0 + a_list[k][0] * patch_size:patch_size + a_list[k][0] * patch_size]
a = torch.max(patch)
if a0 < a.item():
a0 = a.item()
for k in range(0,len(t_list)):
img2[:, 0 + t_list[k][1] * patch_size:patch_size + t_list[k][1] * patch_size,
0 + t_list[k][0] * patch_size:patch_size + t_list[k][0] * patch_size] = (img2[:,
0 + t_list[k][1] * patch_size:patch_size + t_list[k][1] * patch_size,
0 + t_list[k][0] * patch_size:patch_size + t_list[k][0] * patch_size] - a0*(1-t_list[k][2]))/t_list[k][2]
defog_img = transforms.ToPILImage()(img2)
defog_img.save('./test21-1.jpg')
defog('./21-1.jpg')
文章出处登录后可见!