前言:本系列文章是关于三维点云处理的常用算法,深入剖析pcl库中相关算法的实现原理,并以非调库的方式实现相应的demo。
1. 最近邻问题概述
(1)最邻近问题:对于点云中的点,怎么去找离它比较近的点
(2)获取邻域点的两种方法:KNN和RNN
-
KNN:如图所示,红色点是要查找的点,蓝色点是数据库中的点,图中是找离红色点最近的3个点,显示出来就是图中的绿色点。
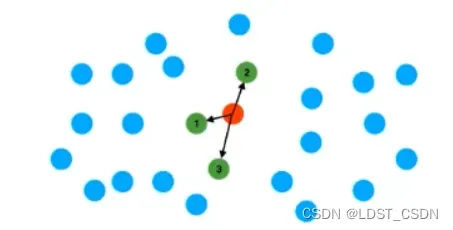
-
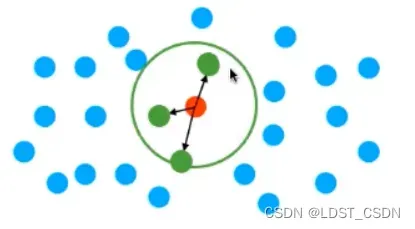
Radius-NN
以上述红色点为圆心,以所选值为半径画圆,圆内的点就是所要找的点
(3)点云最近邻查找的难点 -
点云不规则
-
点云是三维的,比图像高一维,由此造成的数据量是指数上升的。当然,可以建一个三维网格,把点云转化为一个类似于三维图像的东西,但是这也会带来一些矛盾。因为如果网格很多,分辨率足够大,但处理网格需要的内存就很大;如果网格很少,内存够了,但是分辨率又太低。并且,网格中大部分区域都是空白的,所以网格从原理上就不是很高效。
-
点云数据量通常非常大。比如,一个64线的激光雷达,它每秒可产生2.2million个点,如果以20Hz的频率去处理,就意味着每50ms要处理110000个点,如果使用暴力搜索方法对这110000个点都找它最邻近的点,那么计算量为:
(4)最近邻查找:BST、Kd-tree、Octree的共同核心思想 -
空间分割
将空间分割成多个部分,然后在每个小区域中去搜索 -
搜索停止条件
若已知目标点到某一点的距离,那么对于超过这一距离的范围就不需要进行搜索,这个距离也被称为”worst distance”
2. 二叉树(Binary Search Tree, BST)
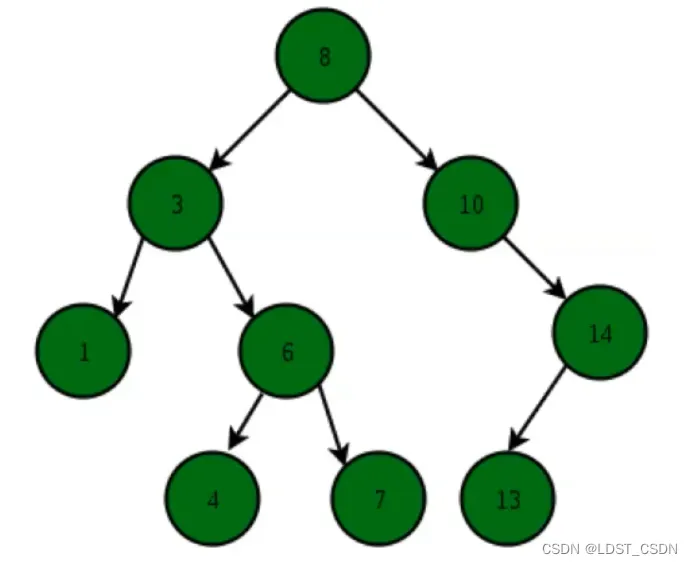
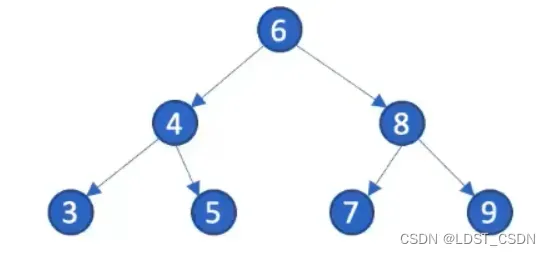
(1)二叉搜索树的特点(一维数据)
- 结点的左子树上的值都小于该根结点的值
- 结点的右子树上的值都大于该根节点的值
- 每一个左右子树都是一个BST
class Node:
def __init__(self, key, value=-1):
self.left = None
self.right = None
self.key = key
self.value = value # 这里的value表示当前点的其他属性,比如颜色、编号等
Data generation —— 随机产生一串数字
db_size = 10
data = np.random.permutation(db_size).tolist()
Recursively insert each an element —— 构造BST的具体实现
def insert(root, key, value=-1):
if root is None:
root = Node(key, value)
else:
if key < root.key:
root.left = insert(root.left, key, value)
elif key > root.key:
root.right = insert(root.right, key, value)
else:
pass
return root
Insert each element —— 主函数调用
root = None
for i point in enumerate(data):
root = insert(root, point, i) # 这里的value(i)表示的是当前点在原始数组中的位置
(3)BST的复杂度
- 最坏情况下,二叉树的各结点顺次链接,排成一列,此时复杂度为
,其中
为BST的高度,也是BST中结点个数

- 最好情况下,BST是处于平衡状态的,此时复杂度为
,
为BST中结点总数
# 递归法
def search_recursive(root, key):
if root is None or root.key == key:
return root
if key < root.key: # 表明key在当前的左子树上
return search_recursive(root.left, key)
elif key > root.key: # 表明key在当前的右子树上
return search_recursive(root.right, key)
# 迭代法 —— 通过栈来实现(不断迭代更新current_node)
def search_iterative(root, key):
current_node = root
while current_node is not None:
if current_node.key == key:
return current_node
elif current_node.key < key:
current_node = current_node.right
elif current_node.key > key:
current_node = current_node.left
return current_node
(5)递归法与迭代法的特点
- 递归
好处:实现简单,容易理解,代码简短
坏处:由于递归需要不停地去压栈,所以每一次递归就是在内存中记录当前递归的位置,因此递归需要的内存空间,这里的
就是递归的次数
- 迭代
优点:它用一个量current_node来表示当前的位置,因此它所需的存储空间为;另外,由于GPU对于堆栈是比较困难的,往往只支持20多层的堆栈,很多时候是不够用的,可能会造成栈溢出(stack-overflow),而且在GPU上实现递归是非常慢的,迭代法可以避免这一问题
缺点:实现起来较为困难
(6)深度优先搜索 (Depth First Traversal)
# 前序遍历 —— 可用于复制一棵树
def preorder(root):
if root is not None:
print(root)
preorder(root.left)
preorder(root.right)
# 中序遍历 —— 可用于排序
def inorder(root):
if root is not None:
inorder(root.left)
print(root)
inorder(root.right)
# 后序遍历 —— 可用于删除一个结点
def postorder(root):
if root is not None:
postorder(root.left)
postorder(root.right)
print(root)
(7)KNN——寻找K个最近邻的点
寻找当前点的K个最近邻点关键在于如何确定worst dist,具体步骤如下:
- 建立一个容器container来存储当前KNN的结果,并将容器中的结果进行排序:例如,当K = 6时,当前KNN结果为[1, 2, 3, 4, 4.5, inf]
- 容器中最后一个就是worst dist,对于新增结点,若新增结点与当前结点计算出来的dist小于当前worst dist,则将其添加到容器中,同时更新worst:例如,若新增结点计算出来的dist为6,则容器中先腾出空间[1, 2, 3, 4, 4.5, 4.5],然后再将当前dist放入到容器中,结果为[1, 2, 3, 4, 4.5, 6],此时worst dist为6
代码实现:构建容器KNNReslutSet
class DistIndex:
def __init__(self, distance, index):
self.distance = distance
self.index = index
def __lt__(self, other):
return self.distance < other.distance
class KNNResultSet:
'''
用于存储KNN查找结果的容器
capacity: 容器大小
count: 当前容器中的元素个数
worst_dist: 容器结果中的最大值(最长距离)
dist_index_list: 容器中各个结果距离所对应的结点序号
'''
def __init__(self, capacity):
self.capacity = capacity
self.count = 0
self.worst_dist = 1e10 # 初始时,将容器中的数据设置大一些
self.dist_index_list = []
for i in range(capacity):
self.dist_index_list.append(DistIndex(self.worst_dist, 0))
self.comparison_counter = 0
def size(self):
return self.count
def full(self):
return self.count == self.capacity
def worstDist(self):
return self.worst_dist
def add_point(self, dist, index):
self.comparison_counter += 1
if dist > self.worst_dist:
return
if self.count < self.capacity:
self.count += 1 # 若当前容器元素个数 小于 容器容量,则新增空位
i = self.count - 1 # 因为是从0开始索引的,故将i定位到新增空位处的索引上
# 下面其实是将容器中的元素进行排序(包括新腾出来的空位),排序结果根据dist对应的index进行存储
while i > 0:
# 若当前容器的最大距离(最后索引) 大于 当前新增距离dist (上面的4.5与6进行比较)
if self.dist_index_list[i-1].distance > dist:
# 则将其往后挪一位,使得整体上是从大到小的顺序
self.dist_index_list[i] = copy.deepcopy(self.dist_index_list[i-1])
i -= 1
else:
break # 否则,跳出循环,将当前dist放到最后一个元素后面
self.dist_index_list[i].distance = dist
self.dist_index_list[i].index = index
self.worst_dist = self.dist_index_list[self.capacity-1].distance
KNN查找:在当前以Node为根节点(root)的二叉树中,查找离key最近的K个结点,并将其存储于result_set中
def knn_search(root:Node, result_set:KNNResultSet, key):
if root is None:
return False
# 将根节点root与目标节点key进行比较,也就是将当前根节点root放到容器中,这里root.key - key表示dist,root.value表示index
result_set.add_point(math.fabs(root.key - key), root.value)
if result_set.worstDist() == 0: # 若worstDist为0,表示当前根节点root就是所要找到的节点key
return True
# 若当前根节点 大于 目标节点
if root.key >= key:
# 则在当前根节点的左子树上进行同样的查找操作
if knn_search(root.left, result_set, key):
return True
# 若当前根节点与目标节点的差 小于 最坏距离,那么还可以寻找较大的节点,使其与目标节点的差在最坏距离之内,因此可往当前根节点的右子树上寻找节点
elif math.fabs(root.key - key) < result_set.worstDist():
return knn_search(root.right, result_set, key)
return False
else:
# 反之,若当前根节点 小于 目标节点,则在当前根节点的右子树上进行同样的查找操作
if knn_search(root.right, result_set, key):
return True
# 若当前根节点与目标节点的差 小于 最坏距离,那么还可以寻找较小的节点,使其与目标节点的差在最坏距离之内,因此可往当前根节点的左子树上寻找节点
elif math.fabs(root.key - key) < result_set.worstDist():
return knn_search(root.left, result_set, key)
return False
(8)Radius NN查找
Radius NN查找中worstDist是固定的,因此不需要容器存储查找结果,并通过排序维持worstDist,只需将当前节点和目标节点的差与worstDist进行判断,来确定当前节点是否为目标节点的Radius最近点。
# 新增节点
def add_point(self, dist, index):
self.comparison_counter += 1
if dist > self.radius: # 若当前节点计算出的dist大于radius,则退出(不将其加入到最近点范围内)
return
# 反之,若当前节点计算出的dist 小于 radius,则将计算出的dist及该节点的索引index存储到最近点范围
# 同时存储该点的索引index
self.count += 1
self.dist_index_list.append(DistIndex(dist, index))
# Radius NN查找
def radius_search(root:Node, result_set:RadiusNNResultSet, key):
if root is None:
return False
# 计算当前根节点root.key与目标节点key的差,判断它是否可以放入容器中result_set
result_set.add_point(math.fabs(root.key - key), root.value)
# 同KNN一样,若当前根节点 大于 目标节点
if root.key >= key:
# 则在当前根节点的左子树上进行同样的查找操作
if radius_search(root.left, result_set, key):
return True
# 若当前根节点与目标节点的差 小于 最坏距离,那么还可以寻找较大的节点,使其与目标节点的差在最坏距离之内,因此可往当前根节点的右子树上寻找节点
elif math.fabs(root.key - key) < result_set.worstDist():
return radius_search(root.right, result_set, key)
return False
else:
# 反之,若当前根节点 小于 目标节点,则在当前根节点的右子树上进行同样的查找操作
if radius_search(root.right, result_set, key):
return True
# 若当前根节点与目标节点的差 小于 最坏距离,那么还可以寻找较小的节点,使其与目标节点的差在最坏距离之内,因此可往当前根节点的左子树上寻找节点
elif math.fabs(root.key - key) < result_set.worstDist():
return radius_search(root.left, result_set, key)
return False
(9)二叉树的应用
二叉树一般是应用在一维数据上,不能将其应用在高维数据上。因为二叉树的查找依赖于左边小、右边大这一特性,对于一维数据来说,这种大和小可以通过直接比较查询点与当前点的大小来获取。而对于高维数据,在某一维度上的大小并不能代表查询点与当前点的大小,故不能应用于高维数据。
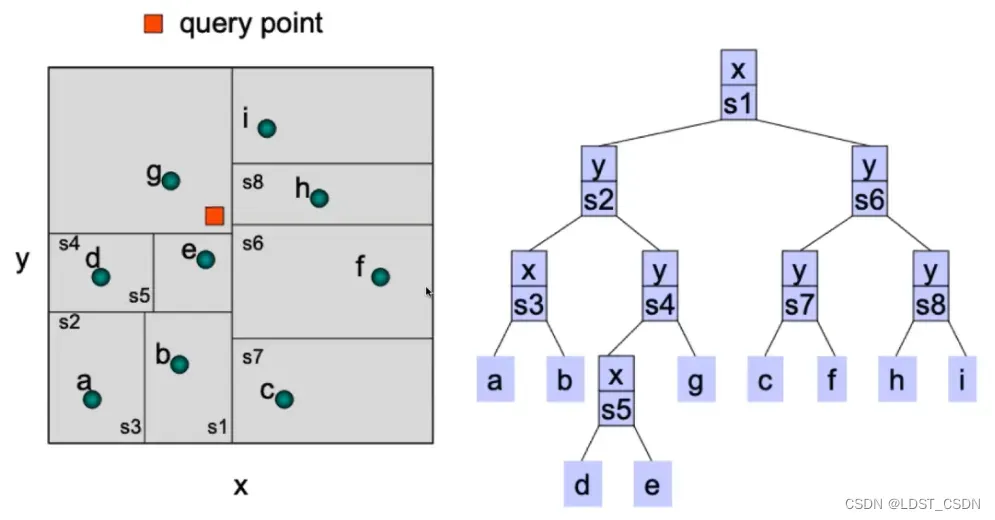
3. Kd-tree
kd-tree通常应用于高维空间(任意维)中,在每个维度上进行一次二叉树,就称为Kd-tree。每次划分时,在每个维度的某一超平面上将样本划分成两部分。另外,通过设置leaf-size来定义停止划分空间的条件,若当前结点个数小于leaf-size,则停止划分。其中,每次划分时的维度可以轮流切换,即x-y-z-x-y-z。
以二维为例,设置leaf-size=1,如下图所示:
class Node:
def __init__(self, axis, value, left, right, point_indices):
self.axis = axis # 当前要切分的维度,比如说接下来是要垂直于哪个轴进行切分
self.value = value # 定义当前所要切分维度中的位置,对应上面就是y轴上的位置
self.left = left # 定义当前结点的左节点
self.right = right # 定义当前结点的右节点
self.point_indices = point_indices # 存储属于当前划分区域的结点的序号
# 若当前结点为一个leaf,则没有必要继续往下划分
def is_leaf(self):
# 因为由下面可知,在构建kdtree过程中,value是初始化为None的
if self.value is None:
return True
else:
return False
(2)构建kd-tree
def kdtree_recursive_build(root, db, point_indices, axis, leaf_size):
'''
root: 所创建的kd-tree的根节点
db: 源数据集
point_indices: 点的索引
axis: 所划分的维度
leaf_size: 最小节点的大小
'''
if root is None: # 若根节点为空,则根据节点的属性创建根节点
root = Node(axis, None, None, None, point_indices)
# 若所要划分的样本数量 大于 最小样本数,则进行kd-tree划分,如下:
if len(point_indices) > leaf_size:
# 以某一个维度(axis)将db中的点进行排序(这里的排序算法sort_key_by_value是如何得到的?)
point_indices_sorted, _ = sort_key_by_value(point_indices, db[point_indices, axis])
# 通过中间靠左位置获取排序后的中间左点(索引及其值)
middle_left_idx = math.ceil(point_indices_sorted.shape[0] / 2) - 1
middle_left_point_idx = point_indices_sorted[middle_left_idx]
middle_left_point_value = db[middle_left_point_idx, axis]
# 通过中间靠右位置获取排序后的中间右点(索引及其值)
middle_right_idx = middle_left_idx + 1
middle_right_point_idx = point_indices_sorted[middle_right_idx]
middle_right_point_value = db[middle_right_point_idx, axis]
# 以中间两点的平均值作为根节点值
root.value = (middle_left_point_value + middle_right_point_value) * 0.5
# 通过中间左点循环构建左子树
root.left = kdtree_recursive_build(root.left,
db, point_indices_sorted[0:middle_right_idx],
axis_round_robin(axis, dim=db.shape[1]),
leaf_size)
# 通过中间右点循环构建右子树
root.right = kdtree_recursive_build(root.right,
db, point_indices_sorted[middle_right_idx:],
axis_round_robin(axis, dim=db.shape[1]),
leaf_size)
return root
# 如何选取分割维度:这里采用的是轮换分割,即x-y-x-y
def axis_round_robin(axis, dim):
if axis == dim-1:
return 0
else:
return axis + 1
(3)复杂度
假设建立的kd-tree有个点,并且在每个维度上是均匀平衡的,那么总共有
层,在每一层中进行排序,使得小于的放左边,大于的放右边,这个排序算法的实践复杂度是
,因此,总的时间复杂度是:
。对于空间复杂度,首先,由于每一层中对于每个结点都要存储其index,所以需要
,总的空间复杂度是
。
(4)使用已经构建好的kdtree进行knn查找
关键在于:对于给定查询点query,判断是否要搜索某一区域。若给定的查询点query在某一区域内,或者给定的查询点query到该区域的最小距离 小于 当前的worst dist,那么就需要在这个区域内进行knn查找
def knn_search(root: Node, db: np.ndarray, result_set: KNNResultSet, query: np.ndarray):
'''
root: kd-tree的根节点
db: 源数据集
result_set: 用于存储knn查找结果的容器,里面维持从小到大的顺序,最后面最大的作为worstDist
query: 待查询点
'''
if root is None:
return False
# 判断当前结点是否为叶子节点,若是,则使用暴力查找方法在叶子节点区域中进行查找
# 因为kd-tree中的叶子节点区域可能不是一个节点,而是多个节点,那么此时就在这多个节点中进行暴力查找
if root.is_leaf():
leaf_points = db[root.point_indices, :]
diff = np.linalg.norm(np.expand_dims(query, 0) - leaf_points, axis=1)
for i in range(diff.shape[0]):
result_set.add_point(diff[i], root.point_indices[i])
return False
# 若在当前axis维度上,待查询点值小于根节点值,则待查询点在根节点的当前维度的左侧
if query[root.axis] <= root.value:
# 则需要在左子树上查找
knn_search(root.left, db, result_set, query)
# 另外,右子树上也可能存在离待查询点query较近的点,那么也需要在当前右子树上进行查找。前提是:query在当前维度的值小于根节点的值,且二者之差比最坏距离worstDist小
### 这一块还不太懂
if math.fabs(query[root.axis] - root.value) < result_set.worstDist():
knn_search(root.right, db, result_set, query)
else:
knn_search(root.right, db, result_set, query)
if math.fabs(query[root.axis] - root.value) < result_set.worstDist():
knn_search(root.left, db, result_set, query)
return False
(5)Kd-tree中的Radius NN
同KNN中的Radius NN一样,区别在于此时的worse dist是固定的,而不是在每次分割中需要根据查找点的距离动态更新的。
4. Octree
(1)Octree特点
针对于三维数据,每个维度进行划分,分割一次会得到8个部分。Octree的好处是:高效,不需要经过根节点就可以提前终止划分。因为:若以查询点为中心,以固定值为半径形成一个球,如果这个球完全落在了某个立方体内,那么此时的搜索范围就可以限定在这个小立方体内。而kd-tree中每一层结点只考虑了一个维度,在当前维度下不知道其他维度是如何分割的,所以只有一个维度信息是不足以确定什么时候可以终止搜索。
(2)Octree的关键流程
- 首先,根据所有点的边界确定最大立方体
- 设置停止搜索条件。主要是设置leaf_size(当前区域中点的个数);设置最小区域(此时最小区域中可能有多个点重叠在一起),设置最小区域的初衷是:在某些情况下,某一区域中可能存在重复点,此时不需要划分到每个区域中只包含一个点,将这些重复点划分到一个区域中即可。另外,如果在这种情况下不设置最小区域,那么在leaf_size下,相同点(重叠点)是不会划分开的,此时在划分时可能会陷入死循环
(3)创建Octree
octree中节点的结构——octant
class Octant:
def __init__(self, children, center, extent, point_indices, is_leaf):
self.children = children # 每次划分时的子节点(8个)
self.center = center # 中心点
self.extent = extent # 半个边长(从中心点到其中一个面的距离)
self.point_indices = point_indices # 点的索引
self.is_leaf = is_leaf # 是否为叶子节点区域
创建octree
def octree_recursive_build(root, db, center, extent, point_indices, leaf_size, min_extent):
'''
root: 要构建的octree的根节点
db: 源数据样本点
center: 中心点
point_indices: 各点的索引
leaf_size: 叶子节点区域大小(叶子节点区域中节点个数)
min_extent: 最小区域大小
'''
if len(point_indices) == 0: # 若源数据样本中没有点
return None # 则返回一个空的octree
if root is None: # 若初始时octree的根节点为空
# 则根据octant节点的属性,创建初始root节点
root = Octant([None for i in range(8)], center, extent, point_indices, is_leaf=True)
# 判断是否需要建立Octree —— 若结点总数小于所设置的min_extent(最小元素个数),就不需要建立
if len(point_indices) <= leaf_size or extent <= min_extent:
root.is_leaf = True
# 否则,进行octree的划分
else:
root.is_leaf = False # 首先,表明当前节点并不是leaf_size
children_point_indices = [[] for i in range(8)] # 准备8个子空间
# 下面是通过for循环将每个点放入到对应的子空间中
for point_idx in point_indices:
point_db = db[point_idx] # 根据索引取出当前点
morton_code = 0
# 根据当前点与中心点在3个维度上的比较,将空间划分为8份
if point_db[0] > center[0]:
morton_code = morton_code | 1
if point_db[1] > center[1]:
morton_code = morton_code | 2
if point_db[2] > center[2]:
morton_code = morton_code | 4
# 将当前点归属到对应的子空间中
children_point_indices[morton_code].append(point_idx)
# 创建children
factor = [-0.5, 0.5]
for i in range(8):
# 计算每一个子节点的中心点的3个维度坐标
child_center_x = center[0] + factor[(i & 1) > 0] * extent
child_center_y = center[1] + factor[(i & 2) > 0] * extent
child_center_z = center[2] + factor[(i & 4) > 0] * extent
# 计算每一个子节点的边长
child_extent = 0.5 * extent
# 确定每一个子节点的中心点坐标
child_center = np.asarray([child_center_x, child_center_y, child_center_z])
# 根据octant参数,递归创建子octree
root.children[i] = octree_recursive_build(root.children[i],
db,
child_center,
child_extent,
children_point_indices[i],
leaf_size,
min_extent)
return root
(4)Octree的KNN查找
def inside(query: np.ndarray, radius: float, octant: Octant):
"""
功能:判断以待查询点query为球心,radius为半径的球是否在Octant中
query: 待查询点
radius: 球半径
octant: 待比较的子区域
"""
query_offset = query - octant.center
query_offset_abs = np.fabs(query_offset) # 当前待查询点query到octant中心的绝对距离
possible_space = query_offset_abs + radius # 上述绝对距离加上半径
# 比较绝对距离加半径与 octant一半边长的大小 若小于则表示query在octant内,反之则表示query在octant外
return np.all(possible_space < octant.extent)
def overlaps(query: np.ndarray, radius: float, octant: Octant):
"""
需要仔细琢磨
功能:判断一个立方体与一个球是否有交集
query: 待查询点
radius: 球半径
octant: 待比较的子区域
"""
query_offset = query - octant.center
query_offset_abs = np.fabs(query_offset) # 当前待查询点query到octant中心的绝对距离
max_dist = radius + octant.extent # 将球半径与当前octant一半边长作为最大距离阈值
if np.any(query_offset_abs > max_dist): # case1 判断是否相离
return False
if np.sum((query_offset_abs < octant.extent).astype(np.int)) >= 2: # case2 球与面是否相交
return True
# case3:比较对角线+球半径 与 octant中心到球心之间的距离,来判断球与立方体角点是否相交
# 另外,通过max来减少一个维度,使其能够判断球是否与立方体的棱边相交
x_diff = max(query_offset_abs[0] - octant.extent, 0)
y_diff = max(query_offset_abs[1] - octant.extent, 0)
z_diff = max(query_offset_abs[2] - octant.extent, 0)
return x_diff * x_diff + y_diff * y_diff + z_diff * z_diff < radius * radius
def octree_knn_search(root: Octant, db: np.ndarray, result_set: KNNResultSet, query: np.ndarray):
"""
root: 创建的octree根节点
db: 源数据样本点
result_set: 存储搜索结果的容器
query: 待查询点
"""
if root is None: # 若Octree为空,则直接返回False
return False
# 若当前区域为is_leaf,则直接将其中的点与待查询点进行逐个比较————暴力查找
if root.is_leaf and len(root.point_indices) > 0:
leaf_points = db[root.point_indices, :] # 取出叶子节点区域中的全部点
# 计算待查询点与所有叶子节点之间的距离
diff = np.linalg.norm(np.expand_dims(query, 0) - leaf_points, axis=1)
# 根据计算出的距离diff,来判断是否可以将对应的点放入到存储容器result_set中
for i in range(diff.shape[0]):
result_set.add_point(diff[i], root.point_indices[i])
return inside(query, result_set.worstDist(), root) # 这个inside函数表示的是什么意思
# 若当前区域不是is_leaf,则要找当前结点下的8个子节点
# 下面的3个if是找到最有可能包含待查询结点的子节点区域
morton_code = 0
if query[0] > root.center[0]:
morton_code = morton_code | 1
if query[1] > root.center[1]:
morton_code = morton_code | 2
if query[2] > root.center[2]:
morton_code = morton_code | 4
# 在找到的子节点区域中继续递归下去找,若能够返回True,则表示在当前子节点区域下找到了
if octree_knn_search(root.children[morton_code], db, result_set, query):
return True
# 若返回的是False,则表示上面那个子节点区域中没有找到,需要继续在其他子节点区域中查找
for c, child in enumerate(root.children):
# 遍历到上面已经查找过的子节点区域(morton_code) 或者 遍历到的子节点区域为空时
# 直接跳过,在下一个子节点区域中进行查找
if c == morton_code or child is None:
continue
# overlaps是判断当前octant 与 以待查询点query为圆心、worstDist为半径的球是否有交集————相离
# 若没有交点(返回的是False),则跳过当前子区域octant不进行查找
if False == overlaps(query, result_set.worstDist(), child):
continue
# 在剩下的子区域中进行查找
if octree_knn_search(child, db, result_set, query):
return True
# 若以待查询点为圆心、worstDist为半径的球被octant包围了,那么就可提前终止搜索
# inside():表示一个球是否完全被一个立方体所包围
return inside(query, result_set.worstDist(), root)
(5)Octree的KNN改进查找
若可判断出以当前查询点query为球心、worseDist为半径的球包含一个子区域,那么就不必在其他子区域中查找,只需在这个被包围的子区域中查找即可
def contains(query: np.ndarray, radius: float, octant: Octant):
"""
功能:判断以query为球心,radius为半径的球是否包围子区域octant
query: 待查询点
radius: 球心
octant: 子区域
"""
query_offset = query - octant.center
query_offset_abs = np.fabs(query_offset) # 当前待查询点query到octant中心的绝对距离
# 将绝对距离 + 当前octant一半长度 作为 最大距离阈值,如下图所示
query_offset_to_farthest_corner = query_offset_abs + octant.extent
return np.linalg.norm(query_offset_to_farthest_corner) < radius
文章出处登录后可见!