一、概述
我们知道 PyTorch 本身对于单机多卡提供了两种实现方式
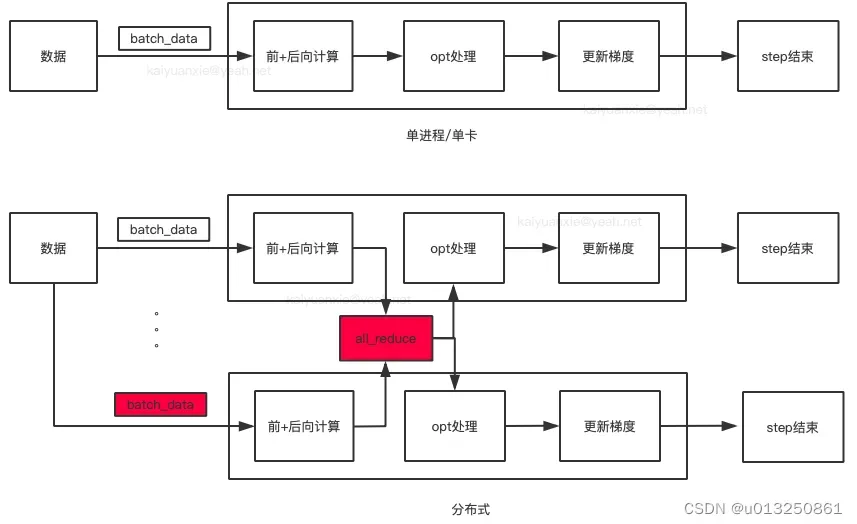
- DataParallel(DP):Parameter Server模式,一张卡位reducer,实现也超级简单,一行代码。
- DistributedDataParallel(DDP):All-Reduce模式,本意是用来分布式训练,但是也可用于单机多卡。
DataParallel(DP)是基于Parameter server的算法,实现比较简单,只需在原单机单卡代码的基础上增加一行:
model = nn.DataParallel(model, device_ids=config.gpu_id)
但是其负载不均衡的问题比较严重,有时在模型较大的时候(比如bert-large),reducer的那张卡会多出3-4g的显存占用,并且速度也比较慢。
官方建议用新的DDP(DistributedDataParallel),采用all-reduce算法,本来设计主要是为了多机多卡使用,但是单机上也能用。
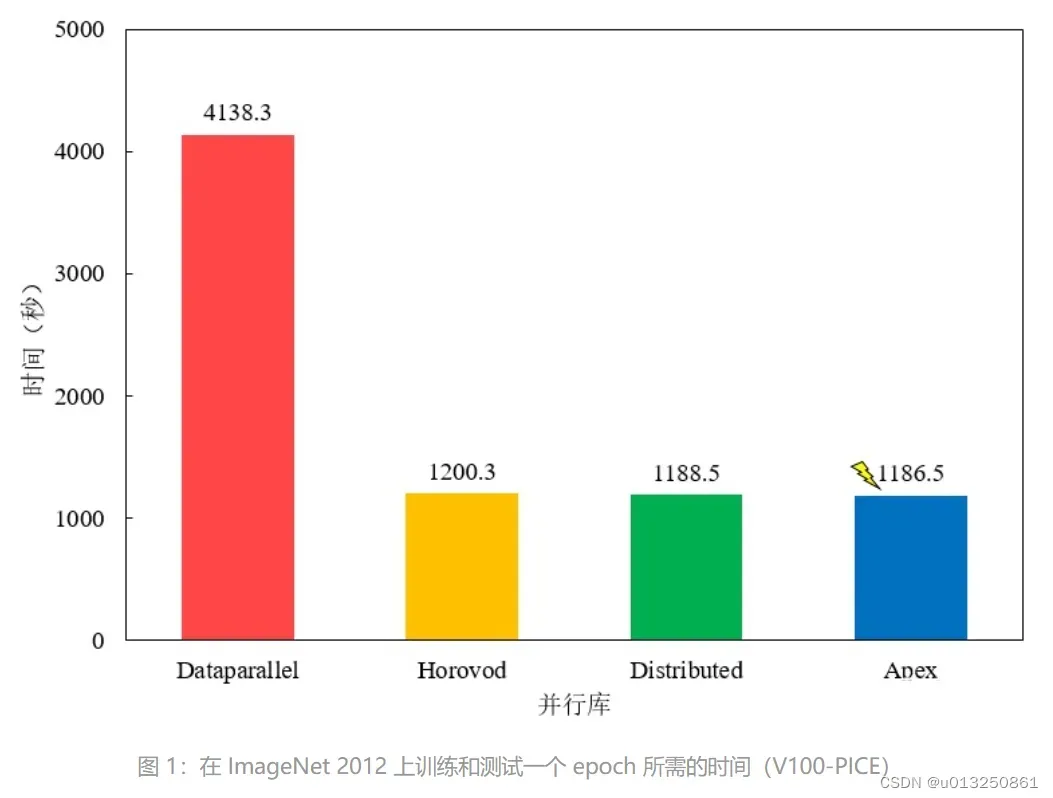
使用 4 块 Tesla V100-PICE 在 ImageNet 进行了运行时间的测试,测试结果发现 Apex 的加速效果最好,但与 Horovod/Distributed 差别不大,平时可以直接使用内置的 Distributed。Dataparallel 较慢,不推荐使用。
二、nn.DataParallel(简单方便、较慢、GPU 负载不均衡、不推荐使用)
DataParallel 可以帮助我们(使用单进程控)将模型和数据加载到多个 GPU 中,控制数据在 GPU 之间的流动,协同不同 GPU 上的模型进行并行训练(细粒度的方法有 scatter,gather 等等)。
DataParallel 使用起来非常方便,我们只需要用 DataParallel 包装模型,再设置一些参数即可。需要定义的参数包括:参与训练的 GPU 有哪些,device_ids=gpus;用于汇总梯度的 GPU 是哪个,output_device=gpus[0] 。DataParallel 会自动帮我们将数据切分 load 到相应 GPU,将模型复制到相应 GPU,进行正向传播计算梯度并汇总:
model = nn.DataParallel(model.cuda(), device_ids=gpus, output_device=gpus[0])
值得注意的是,模型和数据都需要先 load 进 GPU 中,DataParallel 的 module 才能对其进行处理,否则会报错:
# 这里要 model.cuda()
model = nn.DataParallel(model.cuda(), device_ids=gpus, output_device=gpus[0])
for epoch in range(100):
for batch_idx, (data, target) in enumerate(train_loader):
# 这里要 images/target.cuda()
images = images.cuda(non_blocking=True)
target = target.cuda(non_blocking=True)
...
output = model(images)
loss = criterion(output, target)
...
optimizer.zero_grad()
loss.backward()
optimizer.step()
汇总一下,DataParallel 并行训练部分主要与如下代码段有关:
# main.py
import torch
import torch.distributed as dist
gpus = [0, 1, 2, 3]
torch.cuda.set_device('cuda:{}'.format(gpus[0]))
train_dataset = ...
train_loader = torch.utils.data.DataLoader(train_dataset, batch_size=...)
model = ...
model = nn.DataParallel(model.to(device), device_ids=gpus, output_device=gpus[0])
optimizer = optim.SGD(model.parameters())
for epoch in range(100):
for batch_idx, (data, target) in enumerate(train_loader):
images = images.cuda(non_blocking=True)
target = target.cuda(non_blocking=True)
...
output = model(images)
loss = criterion(output, target)
...
optimizer.zero_grad()
loss.backward()
optimizer.step()
在使用时,使用 python 执行即可:
python main.py
在 ImageNet 上的完整训练代码:
import csv
import argparse
import os
import random
import shutil
import time
import warnings
import torch
import torch.nn as nn
import torch.nn.parallel
import torch.backends.cudnn as cudnn
import torch.distributed as dist
import torch.optim
import torch.multiprocessing as mp
import torch.utils.data
import torch.utils.data.distributed
import torchvision.transforms as transforms
import torchvision.datasets as datasets
import torchvision.models as models
model_names = sorted(name for name in models.__dict__
if name.islower() and not name.startswith("__")
and callable(models.__dict__[name]))
parser = argparse.ArgumentParser(description='PyTorch ImageNet Training')
parser.add_argument('--data',
metavar='DIR',
default='/home/zhangzhi/Data/ImageNet2012',
help='path to dataset')
parser.add_argument('-a',
'--arch',
metavar='ARCH',
default='resnet18',
choices=model_names,
help='model architecture: ' + ' | '.join(model_names) +
' (default: resnet18)')
parser.add_argument('-j',
'--workers',
default=4,
type=int,
metavar='N',
help='number of data loading workers (default: 4)')
parser.add_argument('--epochs',
default=90,
type=int,
metavar='N',
help='number of total epochs to run')
parser.add_argument('--start-epoch',
default=0,
type=int,
metavar='N',
help='manual epoch number (useful on restarts)')
parser.add_argument('-b',
'--batch-size',
default=3200,
type=int,
metavar='N',
help='mini-batch size (default: 3200), this is the total '
'batch size of all GPUs on the current node when '
'using Data Parallel or Distributed Data Parallel')
parser.add_argument('--lr',
'--learning-rate',
default=0.1,
type=float,
metavar='LR',
help='initial learning rate',
dest='lr')
parser.add_argument('--momentum',
default=0.9,
type=float,
metavar='M',
help='momentum')
parser.add_argument('--wd',
'--weight-decay',
default=1e-4,
type=float,
metavar='W',
help='weight decay (default: 1e-4)',
dest='weight_decay')
parser.add_argument('-p',
'--print-freq',
default=10,
type=int,
metavar='N',
help='print frequency (default: 10)')
parser.add_argument('-e',
'--evaluate',
dest='evaluate',
action='store_true',
help='evaluate model on validation set')
parser.add_argument('--pretrained',
dest='pretrained',
action='store_true',
help='use pre-trained model')
parser.add_argument('--seed',
default=None,
type=int,
help='seed for initializing training. ')
best_acc1 = 0
def main():
args = parser.parse_args()
if args.seed is not None:
random.seed(args.seed)
torch.manual_seed(args.seed)
cudnn.deterministic = True
warnings.warn('You have chosen to seed training. '
'This will turn on the CUDNN deterministic setting, '
'which can slow down your training considerably! '
'You may see unexpected behavior when restarting '
'from checkpoints.')
gpus = [0, 1, 2, 3]
main_worker(gpus=gpus, args=args)
def main_worker(gpus, args):
global best_acc1
# create model
if args.pretrained:
print("=> using pre-trained model '{}'".format(args.arch))
model = models.__dict__[args.arch](pretrained=True)
else:
print("=> creating model '{}'".format(args.arch))
model = models.__dict__[args.arch]()
torch.cuda.set_device('cuda:{}'.format(gpus[0]))
model.cuda()
# When using a single GPU per process and per
# DistributedDataParallel, we need to divide the batch size
# ourselves based on the total number of GPUs we have
model = nn.DataParallel(model, device_ids=gpus, output_device=gpus[0])
# define loss function (criterion) and optimizer
criterion = nn.CrossEntropyLoss()
optimizer = torch.optim.SGD(model.parameters(),
args.lr,
momentum=args.momentum,
weight_decay=args.weight_decay)
cudnn.benchmark = True
# Data loading code
traindir = os.path.join(args.data, 'train')
valdir = os.path.join(args.data, 'val')
normalize = transforms.Normalize(mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225])
train_dataset = datasets.ImageFolder(
traindir,
transforms.Compose([
transforms.RandomResizedCrop(224),
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
normalize,
]))
train_loader = torch.utils.data.DataLoader(train_dataset,
batch_size=args.batch_size,
shuffle=True,
num_workers=2,
pin_memory=True)
val_loader = torch.utils.data.DataLoader(datasets.ImageFolder(
valdir,
transforms.Compose([
transforms.Resize(256),
transforms.CenterCrop(224),
transforms.ToTensor(),
normalize,
])),
batch_size=args.batch_size,
shuffle=False,
num_workers=2,
pin_memory=True)
if args.evaluate:
validate(val_loader, model, criterion, args)
return
log_csv = "dataparallel.csv"
for epoch in range(args.start_epoch, args.epochs):
epoch_start = time.time()
adjust_learning_rate(optimizer, epoch, args)
# train for one epoch
train(train_loader, model, criterion, optimizer, epoch, args)
# evaluate on validation set
acc1 = validate(val_loader, model, criterion, args)
# remember best acc@1 and save checkpoint
is_best = acc1 > best_acc1
best_acc1 = max(acc1, best_acc1)
epoch_end = time.time()
with open(log_csv, 'a+') as f:
csv_write = csv.writer(f)
data_row = [
time.strftime("%Y-%m-%d %H:%M:%S", time.localtime(epoch_start)),
epoch_end - epoch_start
]
csv_write.writerow(data_row)
save_checkpoint(
{
'epoch': epoch + 1,
'arch': args.arch,
'state_dict': model.module.state_dict(),
'best_acc1': best_acc1,
}, is_best)
def train(train_loader, model, criterion, optimizer, epoch, args):
batch_time = AverageMeter('Time', ':6.3f')
data_time = AverageMeter('Data', ':6.3f')
losses = AverageMeter('Loss', ':.4e')
top1 = AverageMeter('Acc@1', ':6.2f')
top5 = AverageMeter('Acc@5', ':6.2f')
progress = ProgressMeter(len(train_loader),
[batch_time, data_time, losses, top1, top5],
prefix="Epoch: [{}]".format(epoch))
# switch to train mode
model.train()
end = time.time()
for i, (images, target) in enumerate(train_loader):
# measure data loading time
data_time.update(time.time() - end)
images = images.cuda(non_blocking=True)
target = target.cuda(non_blocking=True)
# compute output
output = model(images)
loss = criterion(output, target)
# measure accuracy and record loss
acc1, acc5 = accuracy(output, target, topk=(1, 5))
losses.update(loss.item(), images.size(0))
top1.update(acc1[0], images.size(0))
top5.update(acc5[0], images.size(0))
# compute gradient and do SGD step
optimizer.zero_grad()
loss.backward()
optimizer.step()
# measure elapsed time
batch_time.update(time.time() - end)
end = time.time()
if i % args.print_freq == 0:
progress.display(i)
def validate(val_loader, model, criterion, args):
batch_time = AverageMeter('Time', ':6.3f')
losses = AverageMeter('Loss', ':.4e')
top1 = AverageMeter('Acc@1', ':6.2f')
top5 = AverageMeter('Acc@5', ':6.2f')
progress = ProgressMeter(len(val_loader), [batch_time, losses, top1, top5],
prefix='Test: ')
# switch to evaluate mode
model.eval()
with torch.no_grad():
end = time.time()
for i, (images, target) in enumerate(val_loader):
images = images.cuda(non_blocking=True)
target = target.cuda(non_blocking=True)
# compute output
output = model(images)
loss = criterion(output, target)
# measure accuracy and record loss
acc1, acc5 = accuracy(output, target, topk=(1, 5))
losses.update(loss.item(), images.size(0))
top1.update(acc1[0], images.size(0))
top5.update(acc5[0], images.size(0))
# measure elapsed time
batch_time.update(time.time() - end)
end = time.time()
if i % args.print_freq == 0:
progress.display(i)
# TODO: this should also be done with the ProgressMeter
print(' * Acc@1 {top1.avg:.3f} Acc@5 {top5.avg:.3f}'.format(top1=top1,
top5=top5))
return top1.avg
def save_checkpoint(state, is_best, filename='checkpoint.pth.tar'):
torch.save(state, filename)
if is_best:
shutil.copyfile(filename, 'model_best.pth.tar')
class AverageMeter(object):
"""Computes and stores the average and current value"""
def __init__(self, name, fmt=':f'):
self.name = name
self.fmt = fmt
self.reset()
def reset(self):
self.val = 0
self.avg = 0
self.sum = 0
self.count = 0
def update(self, val, n=1):
self.val = val
self.sum += val * n
self.count += n
self.avg = self.sum / self.count
def __str__(self):
fmtstr = '{name} {val' + self.fmt + '} ({avg' + self.fmt + '})'
return fmtstr.format(**self.__dict__)
class ProgressMeter(object):
def __init__(self, num_batches, meters, prefix=""):
self.batch_fmtstr = self._get_batch_fmtstr(num_batches)
self.meters = meters
self.prefix = prefix
def display(self, batch):
entries = [self.prefix + self.batch_fmtstr.format(batch)]
entries += [str(meter) for meter in self.meters]
print('\t'.join(entries))
def _get_batch_fmtstr(self, num_batches):
num_digits = len(str(num_batches // 1))
fmt = '{:' + str(num_digits) + 'd}'
return '[' + fmt + '/' + fmt.format(num_batches) + ']'
def adjust_learning_rate(optimizer, epoch, args):
"""Sets the learning rate to the initial LR decayed by 10 every 30 epochs"""
lr = args.lr * (0.1**(epoch // 30))
for param_group in optimizer.param_groups:
param_group['lr'] = lr
def accuracy(output, target, topk=(1, )):
"""Computes the accuracy over the k top predictions for the specified values of k"""
with torch.no_grad():
maxk = max(topk)
batch_size = target.size(0)
_, pred = output.topk(maxk, 1, True, True)
pred = pred.t()
correct = pred.eq(target.view(1, -1).expand_as(pred))
res = []
for k in topk:
correct_k = correct[:k].view(-1).float().sum(0, keepdim=True)
res.append(correct_k.mul_(100.0 / batch_size))
return res
if __name__ == '__main__':
main()
三、torch.distributed(加速并行训练、解决 DataParallel 速度慢,GPU 负载不均衡的问题,目前已经很成熟了)
在 pytorch 1.0 之后,官方终于对分布式的常用方法进行了封装,支持 all-reduce,broadcast,send 和 receive 等等。通过 MPI 实现 CPU 通信,通过 NCCL 实现 GPU 通信。官方也曾经提到用 DistributedDataParallel 解决 DataParallel 速度慢,GPU 负载不均衡的问题,目前已经很成熟了~
与 DataParallel 的单进程控制多 GPU 不同,在 distributed 的帮助下,我们只需要编写一份代码,torch 就会自动将其分配给 个进程,分别在
个 GPU 上运行。
在 API 层面,pytorch 为我们提供了 torch.distributed.launch 启动器,用于在命令行分布式地执行 python 文件。在执行过程中,启动器会将当前进程的(其实就是 GPU的)index 通过参数传递给 python,我们可以这样获得当前进程的 index:
parser = argparse.ArgumentParser()
parser.add_argument('--local_rank', default=-1, type=int,
help='node rank for distributed training')
args = parser.parse_args()
print(args.local_rank)
接着,使用 init_process_group 设置GPU 之间通信使用的后端和端口:
dist.init_process_group(backend='nccl')
之后,使用 DistributedSampler 对数据集进行划分。如此前我们介绍的那样,它能帮助我们将每个 batch 划分成几个 partition,在当前进程中只需要获取和 rank 对应的那个 partition 进行训练:
train_sampler = torch.utils.data.distributed.DistributedSampler(train_dataset)
train_loader = torch.utils.data.DataLoader(train_dataset, batch_size=..., sampler=train_sampler)
然后,使用 DistributedDataParallel 包装模型,它能帮助我们为不同 GPU 上求得的梯度进行 all reduce(即汇总不同 GPU 计算所得的梯度,并同步计算结果)。all reduce 后不同 GPU 中模型的梯度均为 all reduce 之前各 GPU 梯度的均值:
model = torch.nn.parallel.DistributedDataParallel(model, device_ids=[args.local_rank])
最后,把数据和模型加载到当前进程使用的 GPU 中,正常进行正反向传播:
torch.cuda.set_device(args.local_rank)
model.cuda()
for epoch in range(100):
for batch_idx, (data, target) in enumerate(train_loader):
images = images.cuda(non_blocking=True)
target = target.cuda(non_blocking=True)
...
output = model(images)
loss = criterion(output, target)
...
optimizer.zero_grad()
loss.backward()
optimizer.step()
汇总一下,torch.distributed 并行训练部分主要与如下代码段有关:
# main.py
import torch
import argparse
import torch.distributed as dist
parser = argparse.ArgumentParser()
parser.add_argument('--local_rank', default=-1, type=int,
help='node rank for distributed training')
args = parser.parse_args()
dist.init_process_group(backend='nccl')
torch.cuda.set_device(args.local_rank)
train_dataset = ...
train_sampler = torch.utils.data.distributed.DistributedSampler(train_dataset)
train_loader = torch.utils.data.DataLoader(train_dataset, batch_size=..., sampler=train_sampler)
model = ...
model = torch.nn.parallel.DistributedDataParallel(model, device_ids=[args.local_rank])
optimizer = optim.SGD(model.parameters())
for epoch in range(100):
for batch_idx, (data, target) in enumerate(train_loader):
images = images.cuda(non_blocking=True)
target = target.cuda(non_blocking=True)
...
output = model(images)
loss = criterion(output, target)
...
optimizer.zero_grad()
loss.backward()
optimizer.step()
在使用时,调用 torch.distributed.launch 启动器启动:
CUDA_VISIBLE_DEVICES=0,1,2,3 python -m torch.distributed.launch --nproc_per_node=4 main.py
在 ImageNet 上的完整训练代码:
import argparse
import os
import random
import shutil
import time
import warnings
import torch
import torch.nn as nn
import torch.nn.parallel
import torch.backends.cudnn as cudnn
import torch.distributed as dist
import torch.optim
import torch.multiprocessing as mp
import torch.utils.data
import torch.utils.data.distributed
import torchvision.transforms as transforms
import torchvision.datasets as datasets
import torchvision.models as models
model_names = sorted(name for name in models.__dict__
if name.islower() and not name.startswith("__")
and callable(models.__dict__[name]))
parser = argparse.ArgumentParser(description='PyTorch ImageNet Training')
parser.add_argument('--data',
metavar='DIR',
default='/home/zhangzhi/Data/exports/ImageNet2012',
help='path to dataset')
parser.add_argument('-a',
'--arch',
metavar='ARCH',
default='resnet18',
choices=model_names,
help='model architecture: ' + ' | '.join(model_names) +
' (default: resnet18)')
parser.add_argument('-j',
'--workers',
default=4,
type=int,
metavar='N',
help='number of data loading workers (default: 4)')
parser.add_argument('--epochs',
default=90,
type=int,
metavar='N',
help='number of total epochs to run')
parser.add_argument('--start-epoch',
default=0,
type=int,
metavar='N',
help='manual epoch number (useful on restarts)')
parser.add_argument('-b',
'--batch-size',
default=3200,
type=int,
metavar='N',
help='mini-batch size (default: 3200), this is the total '
'batch size of all GPUs on the current node when '
'using Data Parallel or Distributed Data Parallel')
parser.add_argument('--lr',
'--learning-rate',
default=0.1,
type=float,
metavar='LR',
help='initial learning rate',
dest='lr')
parser.add_argument('--momentum',
default=0.9,
type=float,
metavar='M',
help='momentum')
parser.add_argument('--local_rank',
default=-1,
type=int,
help='node rank for distributed training')
parser.add_argument('--wd',
'--weight-decay',
default=1e-4,
type=float,
metavar='W',
help='weight decay (default: 1e-4)',
dest='weight_decay')
parser.add_argument('-p',
'--print-freq',
default=10,
type=int,
metavar='N',
help='print frequency (default: 10)')
parser.add_argument('-e',
'--evaluate',
dest='evaluate',
action='store_true',
help='evaluate model on validation set')
parser.add_argument('--pretrained',
dest='pretrained',
action='store_true',
help='use pre-trained model')
parser.add_argument('--seed',
default=None,
type=int,
help='seed for initializing training. ')
def reduce_mean(tensor, nprocs):
rt = tensor.clone()
dist.all_reduce(rt, op=dist.ReduceOp.SUM)
rt /= nprocs
return rt
def main():
args = parser.parse_args()
args.nprocs = torch.cuda.device_count()
if args.seed is not None:
random.seed(args.seed)
torch.manual_seed(args.seed)
cudnn.deterministic = True
warnings.warn('You have chosen to seed training. '
'This will turn on the CUDNN deterministic setting, '
'which can slow down your training considerably! '
'You may see unexpected behavior when restarting '
'from checkpoints.')
main_worker(args.local_rank, args.nprocs, args)
def main_worker(local_rank, nprocs, args):
best_acc1 = .0
dist.init_process_group(backend='nccl')
# create model
if args.pretrained:
print("=> using pre-trained model '{}'".format(args.arch))
model = models.__dict__[args.arch](pretrained=True)
else:
print("=> creating model '{}'".format(args.arch))
model = models.__dict__[args.arch]()
torch.cuda.set_device(local_rank)
model.cuda(local_rank)
# When using a single GPU per process and per
# DistributedDataParallel, we need to divide the batch size
# ourselves based on the total number of GPUs we have
args.batch_size = int(args.batch_size / nprocs)
model = torch.nn.parallel.DistributedDataParallel(model,
device_ids=[local_rank])
# define loss function (criterion) and optimizer
criterion = nn.CrossEntropyLoss().cuda(local_rank)
optimizer = torch.optim.SGD(model.parameters(),
args.lr,
momentum=args.momentum,
weight_decay=args.weight_decay)
cudnn.benchmark = True
# Data loading code
traindir = os.path.join(args.data, 'train')
valdir = os.path.join(args.data, 'val')
normalize = transforms.Normalize(mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225])
train_dataset = datasets.ImageFolder(
traindir,
transforms.Compose([
transforms.RandomResizedCrop(224),
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
normalize,
]))
train_sampler = torch.utils.data.distributed.DistributedSampler(
train_dataset)
train_loader = torch.utils.data.DataLoader(train_dataset,
batch_size=args.batch_size,
num_workers=2,
pin_memory=True,
sampler=train_sampler)
val_dataset = datasets.ImageFolder(
valdir,
transforms.Compose([
transforms.Resize(256),
transforms.CenterCrop(224),
transforms.ToTensor(),
normalize,
]))
val_sampler = torch.utils.data.distributed.DistributedSampler(val_dataset)
val_loader = torch.utils.data.DataLoader(val_dataset,
batch_size=args.batch_size,
num_workers=2,
pin_memory=True,
sampler=val_sampler)
if args.evaluate:
validate(val_loader, model, criterion, local_rank, args)
return
for epoch in range(args.start_epoch, args.epochs):
train_sampler.set_epoch(epoch)
val_sampler.set_epoch(epoch)
adjust_learning_rate(optimizer, epoch, args)
# train for one epoch
train(train_loader, model, criterion, optimizer, epoch, local_rank,
args)
# evaluate on validation set
acc1 = validate(val_loader, model, criterion, local_rank, args)
# remember best acc@1 and save checkpoint
is_best = acc1 > best_acc1
best_acc1 = max(acc1, best_acc1)
if args.local_rank == 0:
save_checkpoint(
{
'epoch': epoch + 1,
'arch': args.arch,
'state_dict': model.module.state_dict(),
'best_acc1': best_acc1,
}, is_best)
def train(train_loader, model, criterion, optimizer, epoch, local_rank, args):
batch_time = AverageMeter('Time', ':6.3f')
data_time = AverageMeter('Data', ':6.3f')
losses = AverageMeter('Loss', ':.4e')
top1 = AverageMeter('Acc@1', ':6.2f')
top5 = AverageMeter('Acc@5', ':6.2f')
progress = ProgressMeter(len(train_loader),
[batch_time, data_time, losses, top1, top5],
prefix="Epoch: [{}]".format(epoch))
# switch to train mode
model.train()
end = time.time()
for i, (images, target) in enumerate(train_loader):
# measure data loading time
data_time.update(time.time() - end)
images = images.cuda(local_rank, non_blocking=True)
target = target.cuda(local_rank, non_blocking=True)
# compute output
output = model(images)
loss = criterion(output, target)
# measure accuracy and record loss
acc1, acc5 = accuracy(output, target, topk=(1, 5))
torch.distributed.barrier()
reduced_loss = reduce_mean(loss, args.nprocs)
reduced_acc1 = reduce_mean(acc1, args.nprocs)
reduced_acc5 = reduce_mean(acc5, args.nprocs)
losses.update(reduced_loss.item(), images.size(0))
top1.update(reduced_acc1.item(), images.size(0))
top5.update(reduced_acc5.item(), images.size(0))
# compute gradient and do SGD step
optimizer.zero_grad()
loss.backward()
optimizer.step()
# measure elapsed time
batch_time.update(time.time() - end)
end = time.time()
if i % args.print_freq == 0:
progress.display(i)
def validate(val_loader, model, criterion, local_rank, args):
batch_time = AverageMeter('Time', ':6.3f')
losses = AverageMeter('Loss', ':.4e')
top1 = AverageMeter('Acc@1', ':6.2f')
top5 = AverageMeter('Acc@5', ':6.2f')
progress = ProgressMeter(len(val_loader), [batch_time, losses, top1, top5],
prefix='Test: ')
# switch to evaluate mode
model.eval()
with torch.no_grad():
end = time.time()
for i, (images, target) in enumerate(val_loader):
images = images.cuda(local_rank, non_blocking=True)
target = target.cuda(local_rank, non_blocking=True)
# compute output
output = model(images)
loss = criterion(output, target)
# measure accuracy and record loss
acc1, acc5 = accuracy(output, target, topk=(1, 5))
torch.distributed.barrier()
reduced_loss = reduce_mean(loss, args.nprocs)
reduced_acc1 = reduce_mean(acc1, args.nprocs)
reduced_acc5 = reduce_mean(acc5, args.nprocs)
losses.update(reduced_loss.item(), images.size(0))
top1.update(reduced_acc1.item(), images.size(0))
top5.update(reduced_acc5.item(), images.size(0))
# measure elapsed time
batch_time.update(time.time() - end)
end = time.time()
if i % args.print_freq == 0:
progress.display(i)
# TODO: this should also be done with the ProgressMeter
print(' * Acc@1 {top1.avg:.3f} Acc@5 {top5.avg:.3f}'.format(top1=top1,
top5=top5))
return top1.avg
def save_checkpoint(state, is_best, filename='checkpoint.pth.tar'):
torch.save(state, filename)
if is_best:
shutil.copyfile(filename, 'model_best.pth.tar')
class AverageMeter(object):
"""Computes and stores the average and current value"""
def __init__(self, name, fmt=':f'):
self.name = name
self.fmt = fmt
self.reset()
def reset(self):
self.val = 0
self.avg = 0
self.sum = 0
self.count = 0
def update(self, val, n=1):
self.val = val
self.sum += val * n
self.count += n
self.avg = self.sum / self.count
def __str__(self):
fmtstr = '{name} {val' + self.fmt + '} ({avg' + self.fmt + '})'
return fmtstr.format(**self.__dict__)
class ProgressMeter(object):
def __init__(self, num_batches, meters, prefix=""):
self.batch_fmtstr = self._get_batch_fmtstr(num_batches)
self.meters = meters
self.prefix = prefix
def display(self, batch):
entries = [self.prefix + self.batch_fmtstr.format(batch)]
entries += [str(meter) for meter in self.meters]
print('\t'.join(entries))
def _get_batch_fmtstr(self, num_batches):
num_digits = len(str(num_batches // 1))
fmt = '{:' + str(num_digits) + 'd}'
return '[' + fmt + '/' + fmt.format(num_batches) + ']'
def adjust_learning_rate(optimizer, epoch, args):
"""Sets the learning rate to the initial LR decayed by 10 every 30 epochs"""
lr = args.lr * (0.1**(epoch // 30))
for param_group in optimizer.param_groups:
param_group['lr'] = lr
def accuracy(output, target, topk=(1, )):
"""Computes the accuracy over the k top predictions for the specified values of k"""
with torch.no_grad():
maxk = max(topk)
batch_size = target.size(0)
_, pred = output.topk(maxk, 1, True, True)
pred = pred.t()
correct = pred.eq(target.view(1, -1).expand_as(pred))
res = []
for k in topk:
correct_k = correct[:k].view(-1).float().sum(0, keepdim=True)
res.append(correct_k.mul_(100.0 / batch_size))
return res
if __name__ == '__main__':
main()
四、torch.distributed使用技巧
1、使用 torch.multiprocessing 取代启动器
有的同学可能比较熟悉 torch.multiprocessing,也可以手动使用 torch.multiprocessing 进行多进程控制。绕开 torch.distributed.launch 自动控制开启和退出进程的一些小毛病~
2、使用 Apex 再加速
Apex 是 NVIDIA 开源的用于混合精度训练和分布式训练库。Apex 对混合精度训练的过程进行了封装,改两三行配置就可以进行混合精度的训练,从而大幅度降低显存占用,节约运算时间。此外,Apex 也提供了对分布式训练的封装,针对 NVIDIA 的 NCCL 通信库进行了优化。
3、Horovod 的优雅实现
Horovod 是 Uber 开源的深度学习工具,它的发展吸取了 Facebook “Training ImageNet In 1 Hour” 与百度 “Ring Allreduce” 的优点,可以无痛与 PyTorch/Tensorflow 等深度学习框架结合,实现并行训练。
4、分布式 evaluation
all_reduce, barrier 等 API 是 distributed 中更为基础和底层的 API。这些 API 可以帮助我们控制进程之间的交互,控制 GPU 数据的传输。在自定义 GPU 协作逻辑,汇总 GPU 间少量的统计信息时,大有用处。熟练掌握这些 API 也可以帮助我们自己设计、优化分布式训练、测试流程。
参考资料:
PyTorch分布式训练基础–DDP使用
PyTorch 分布式训练DDP 单机多卡快速上手
当代研究生应当掌握的并行训练方法(单机多卡)
文章出处登录后可见!