基于旋转高频注入法的永磁同步电机无位置传感器控制
一、原理解说
PMSM 无位置传感器控制主要分为两类:一种是在中高速范围内利用反电动势和电角速度的关系,通过计算反电动势获取转子位置信息,例如磁链观测器,模型参考自适应法,扩展卡尔曼滤波器和滑模观测器。另一种是利用电机凸极效应的高频注入法,包括脉振高频电流注入法、旋转高频电压注入法和脉振高频电压注入法,后两种方法与基本数学方程无关,它对电机参数不敏感,具有更好的鲁棒性。
在零低速环境下,基波模型中有关位置的反电动势信号很微弱,提取时信噪比过低,此时实现无位置传感器控制可利用电机的高频激励模型,通过注入高频信号再提取高频响应中的位置信号即可,高频注入法主要以旋转高频电压注入法和脉振高频电压注入法两种为主。
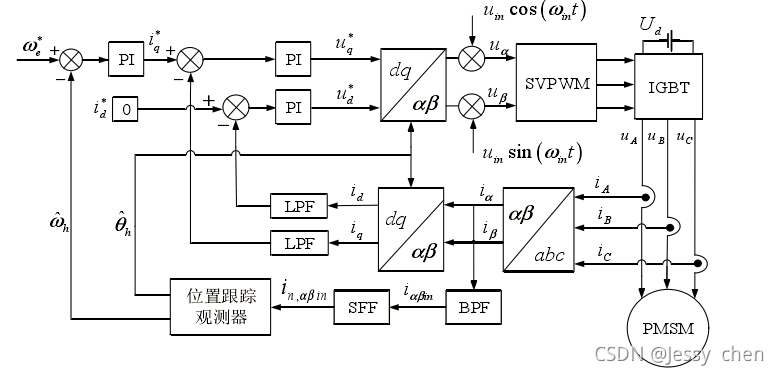
旋转高频电压注入法在两相静止坐标系( a-β)下,分别向α轴和β轴注入高频电压信号,然后通过带通滤波器(BPF)检测电机的高频电流响应,高频电流响应中包含正序分量和负序分量,只有负序分量的相位中可以提取位置信号,再使用同步轴系高通滤波器(SFF)滤除正序分量,最后获取转子的位置和速度信息,这种方法实现较容易,低速时性能较好[。旋转高频电压注入法在低速下抗扰性较好,但同时也受到滤波器延时和 DSP信号采集、控制延时的影响,转子估算相位会有延迟。针对延时问题通常采用一种补偿算法,从高频正序电流分量中提取误差量,用以对转子位置辨识误差进行补偿,以提高位置辨识精度
基于旋转高频注入法的永磁同步电机无位置传感器控制系统框图如下:
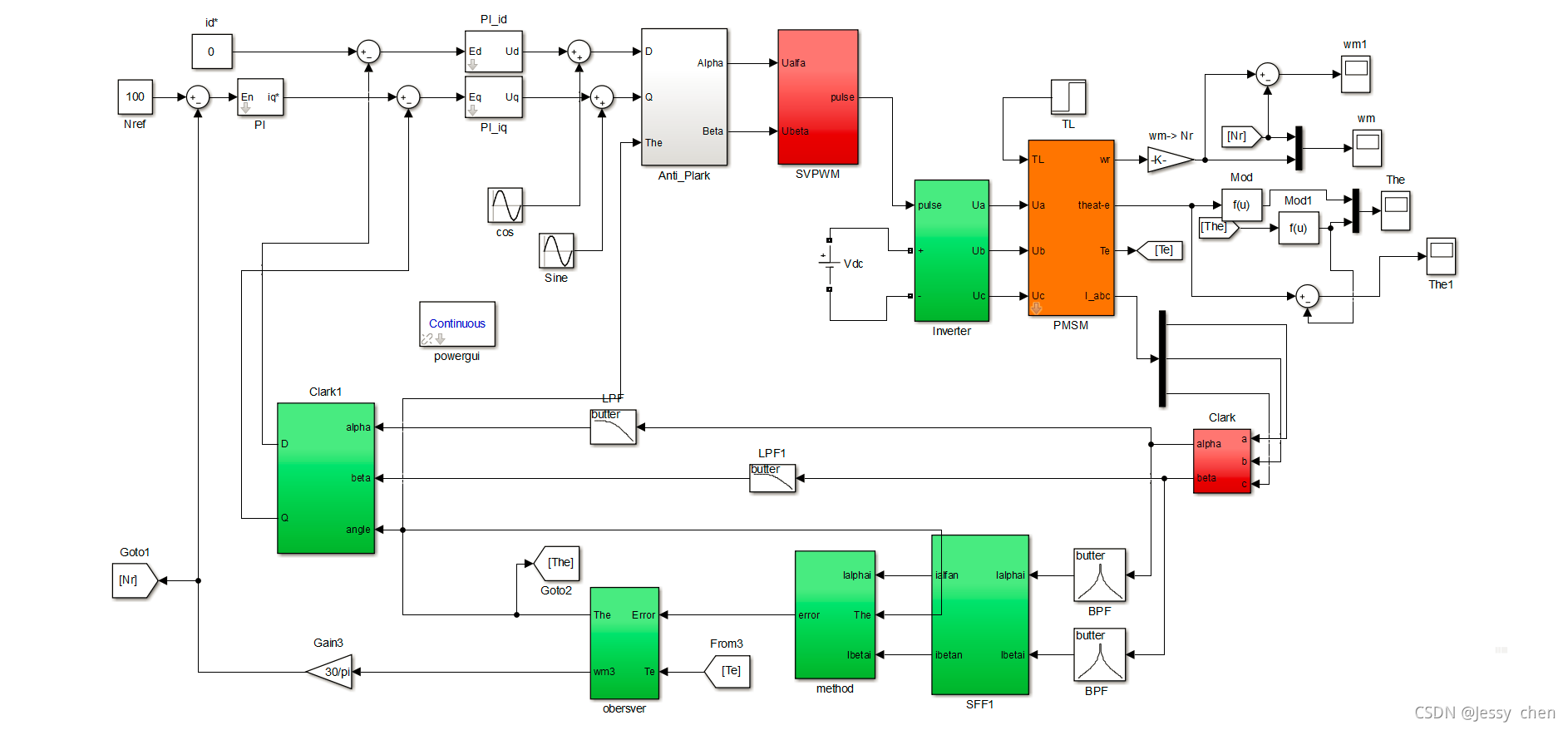
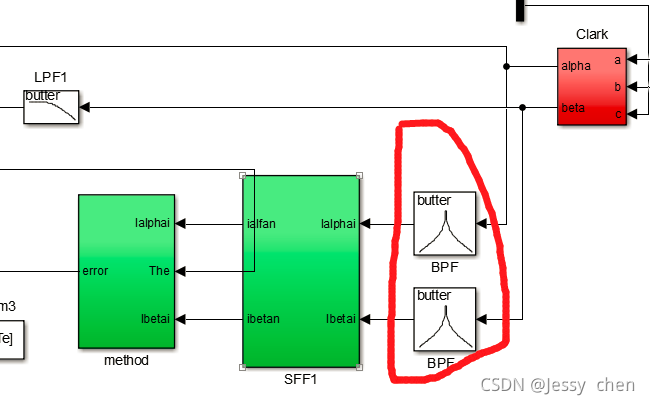
 此框图在matlab/simulink中搭建如下图所示:
此框图在matlab/simulink中搭建如下图所示:
 为了提取负相序高频电流响应中的转子位置信息,必须很好地滤除电机端电流中的基频电流﹑低次谐波电流、PWM开关频率谐波电流以及正相序高频电流等信号。基波电流与高频电流幅值相差很大,载波频率远比注入高频频率高,这两者都可以通过常规的带通滤波器(BPF)予以滤除。载波电流正相序分量与负相序分量的旋转方向相反,因此可通过同步轴系高通滤波器(Synchronous Frame Filter,SFF)将正序电流成分滤除。
为了提取负相序高频电流响应中的转子位置信息,必须很好地滤除电机端电流中的基频电流﹑低次谐波电流、PWM开关频率谐波电流以及正相序高频电流等信号。基波电流与高频电流幅值相差很大,载波频率远比注入高频频率高,这两者都可以通过常规的带通滤波器(BPF)予以滤除。载波电流正相序分量与负相序分量的旋转方向相反,因此可通过同步轴系高通滤波器(Synchronous Frame Filter,SFF)将正序电流成分滤除。
同步轴系高通滤波器通过坐标变换把高频电流矢量变换到一个与注入的高频电压矢量同步旋转的参考坐标系中,此时正相序高频电流矢量变成直流,很容易通过常规的高通滤波器将其滤除。
经过滤波后,剩下的信号为负相序高频电流分量,这是一个可以被用来跟踪凸极的有用信号,其矢量表达式为:

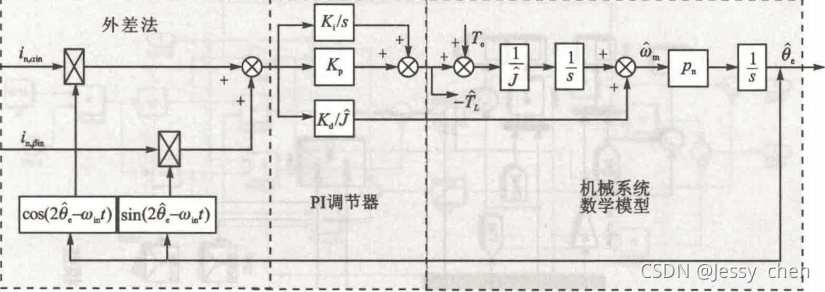
为了从负序高频电流分量中提取转子位置信息,目前常用的是转子位置跟踪观测器方法。其实现框图如下:
二、simulink框图模块介绍
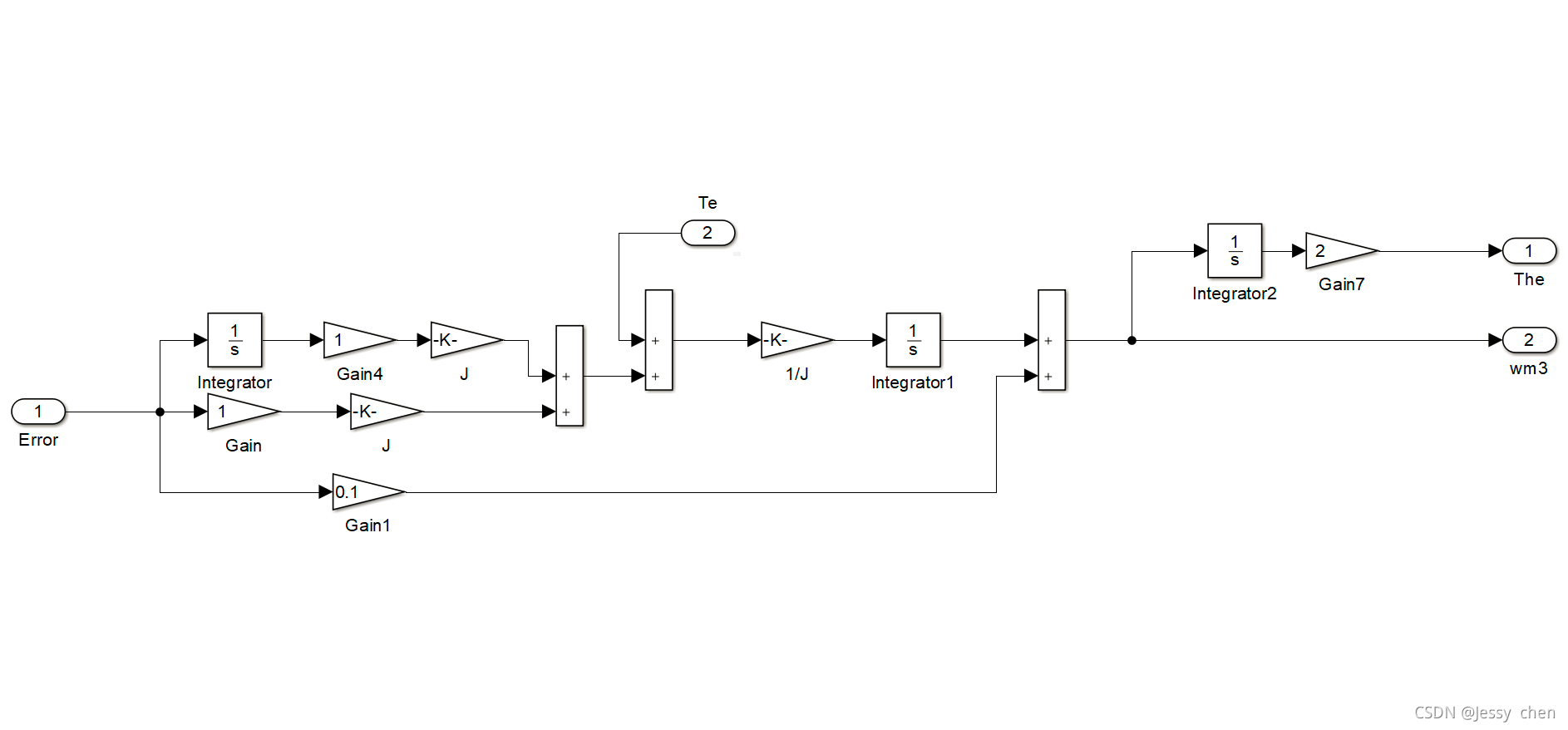
2.1、速度环模块
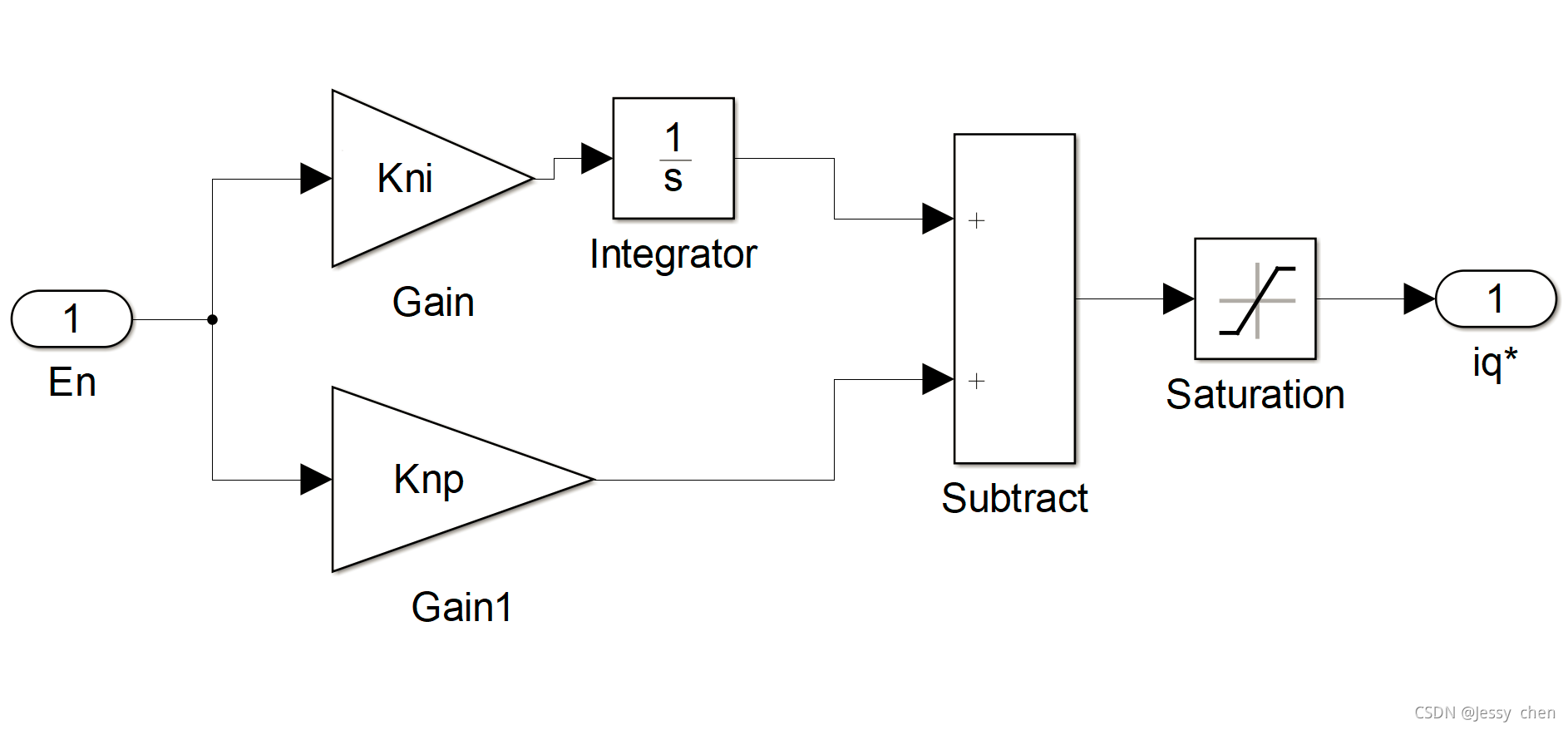
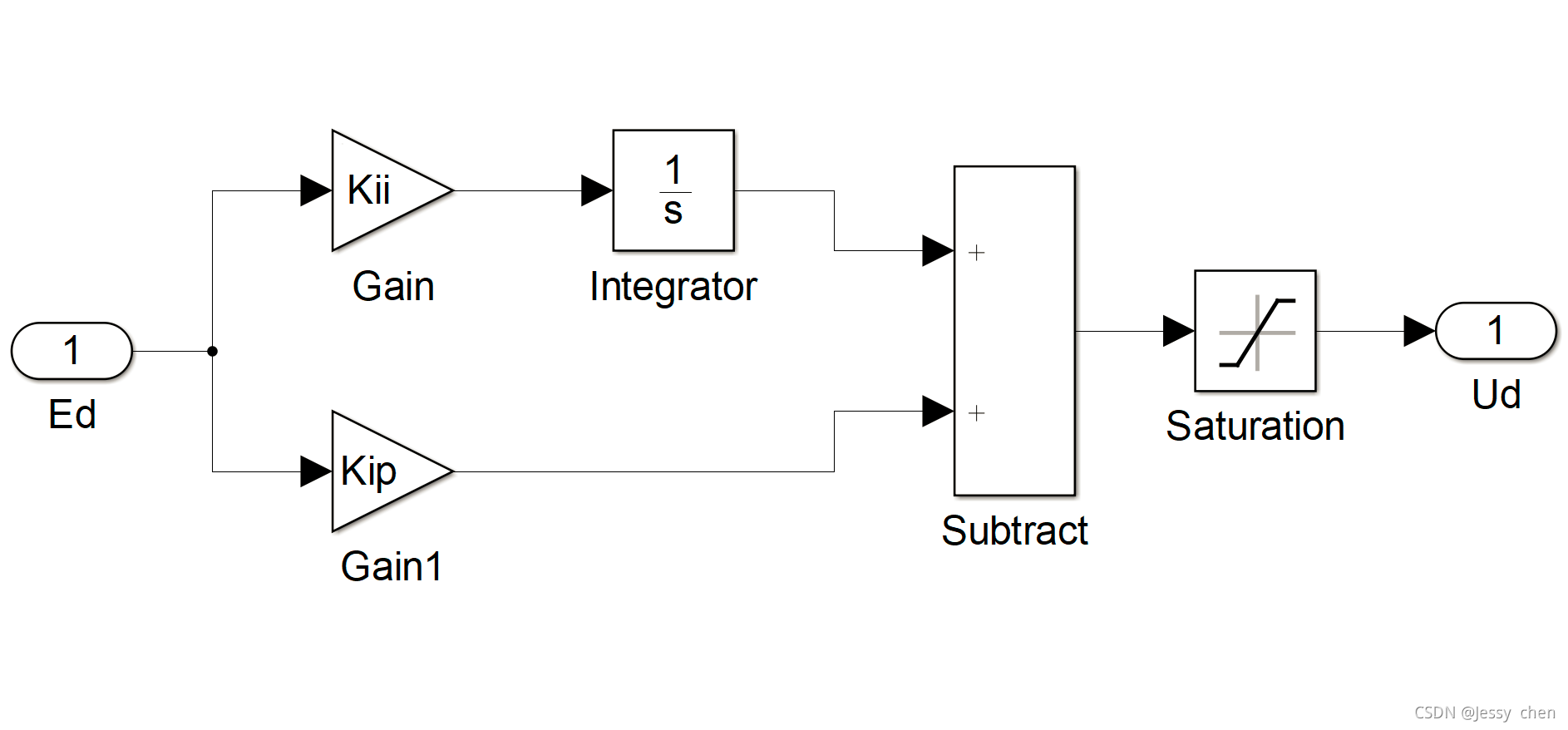
2.2、电流环模块(Iq和Id一样)
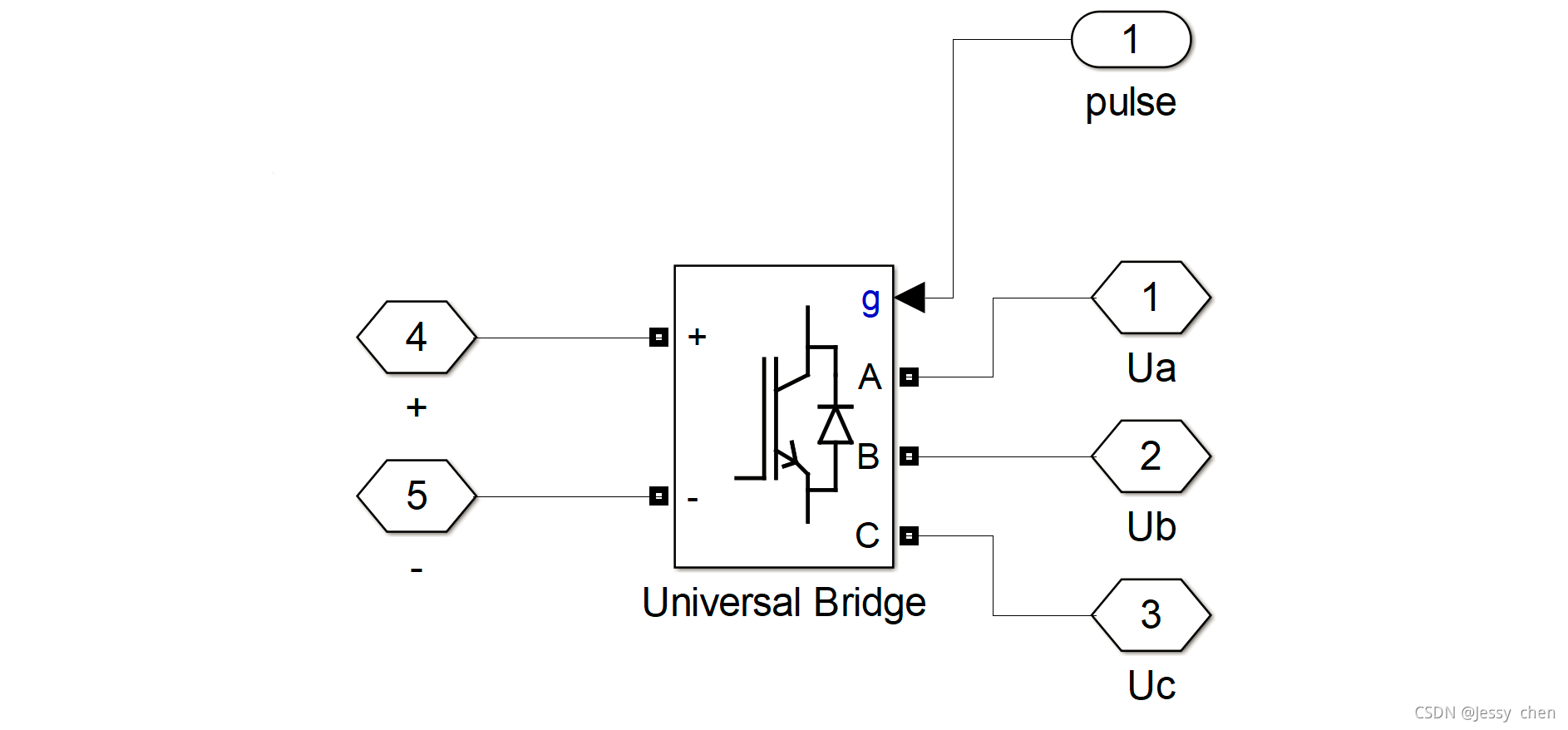
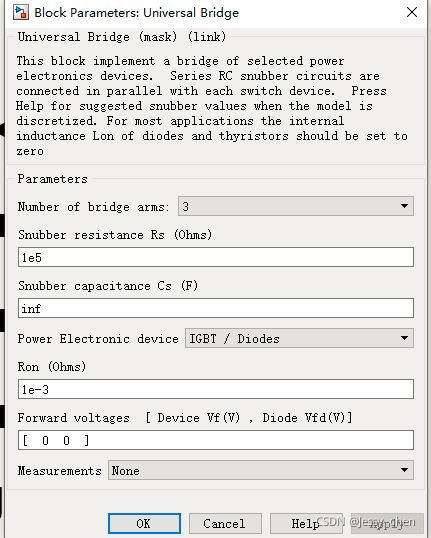
2.3、Inverter模块
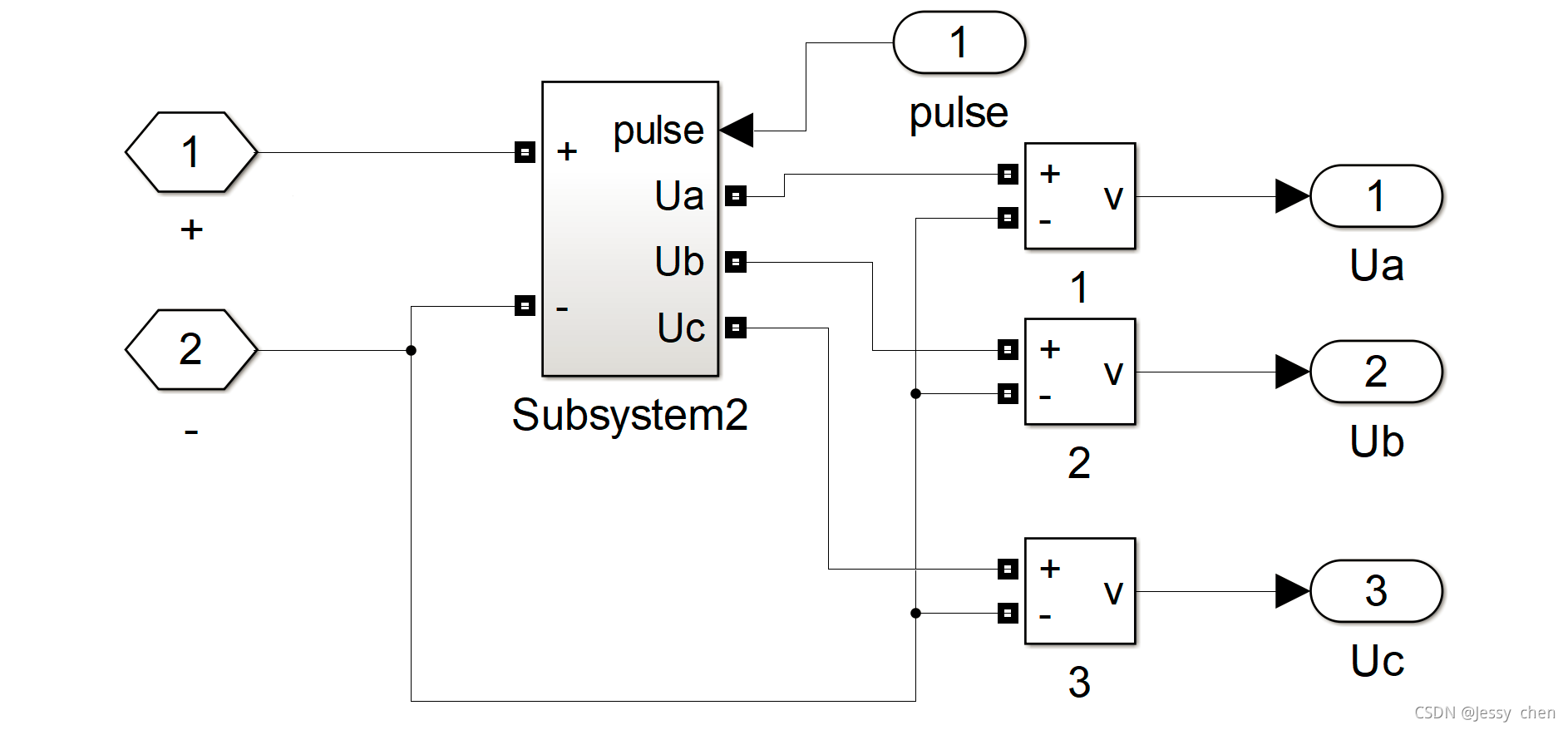 其中subsystem2模块为:
其中subsystem2模块为:
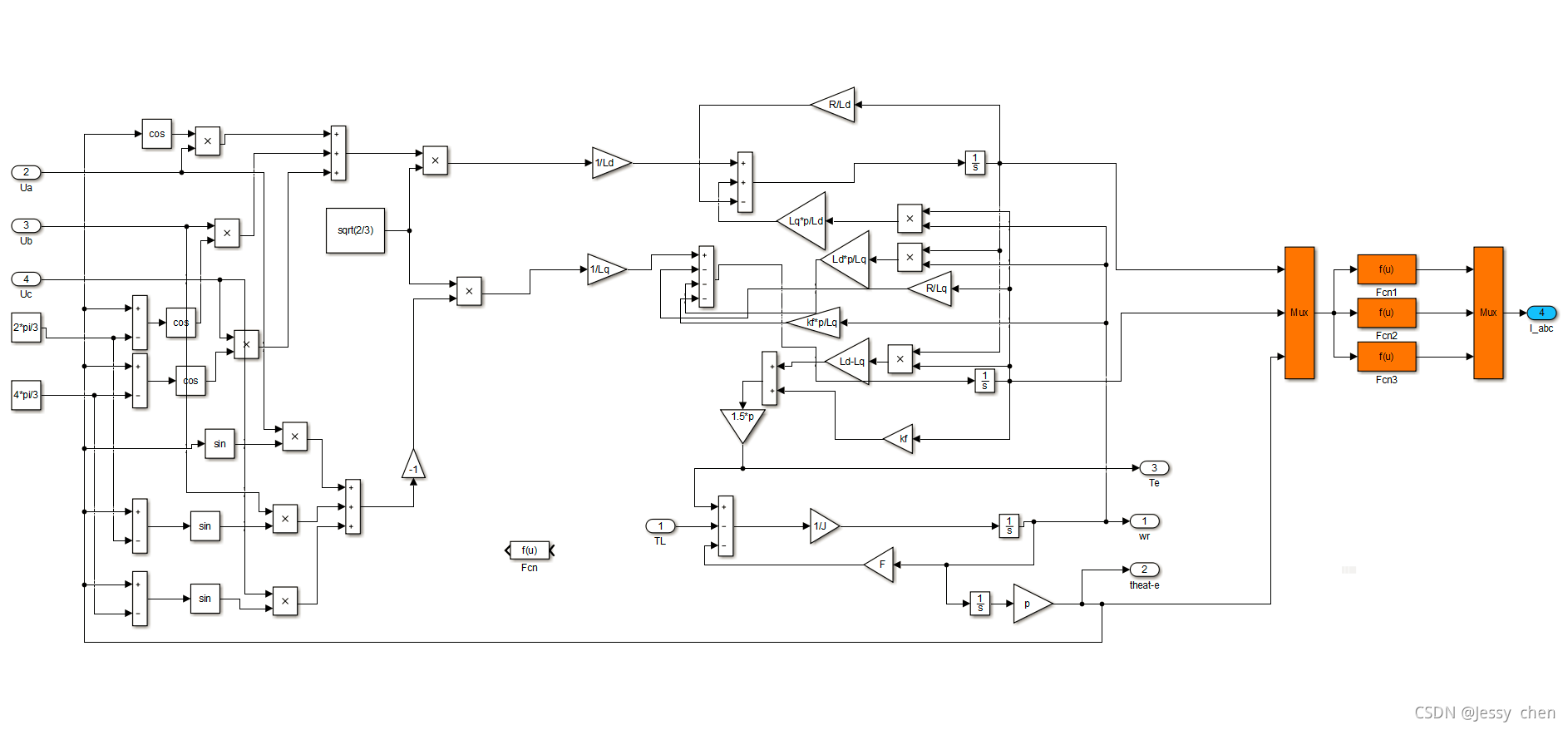
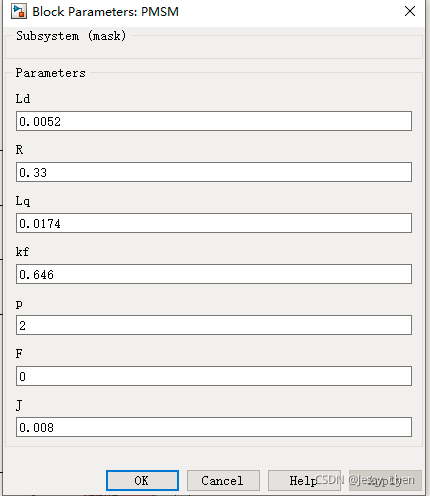
2.4、PMSM模块(通用)
2.5、SFF模块(同步轴系高通滤波器)
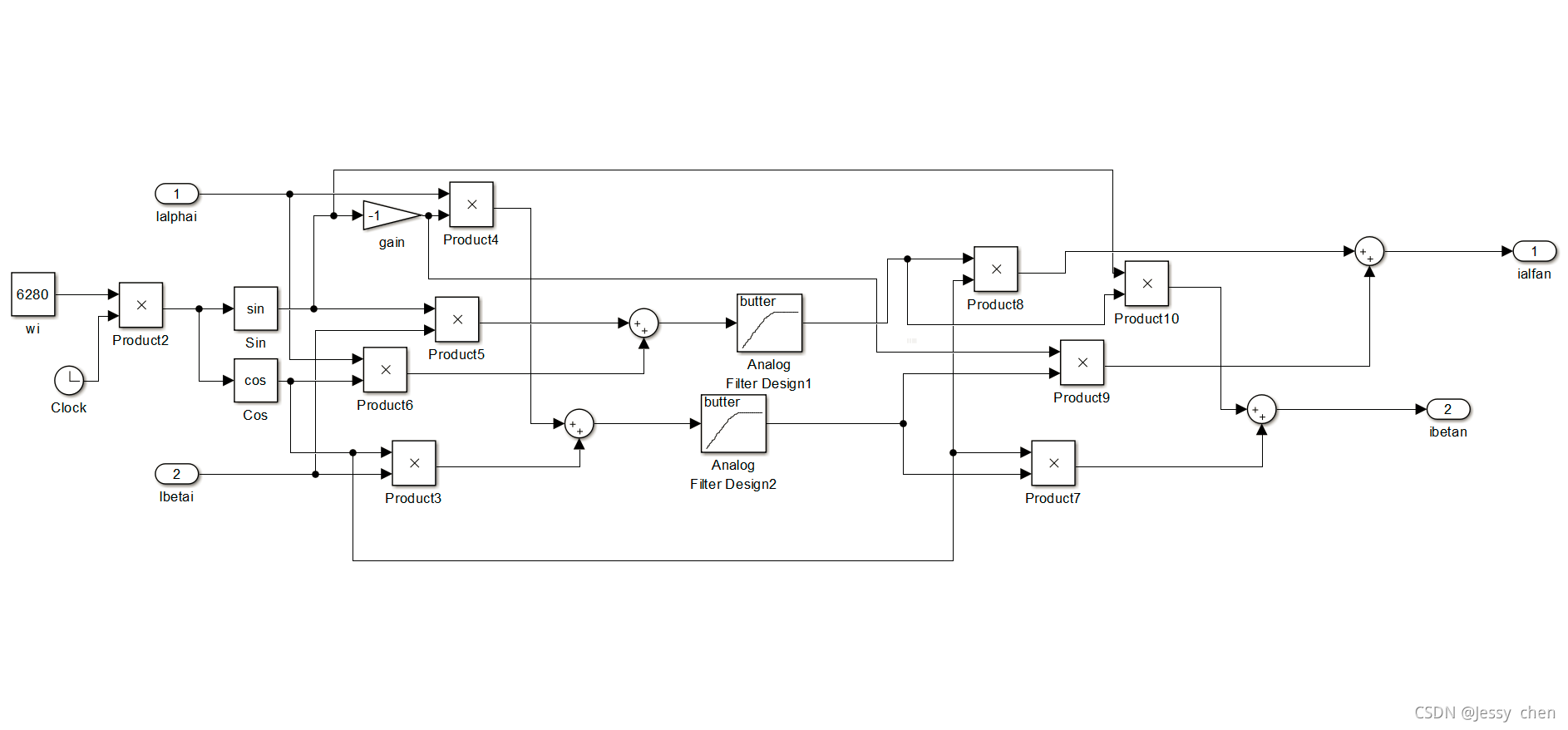 其中
其中
2.6、外差法模块(框图中名字是method)
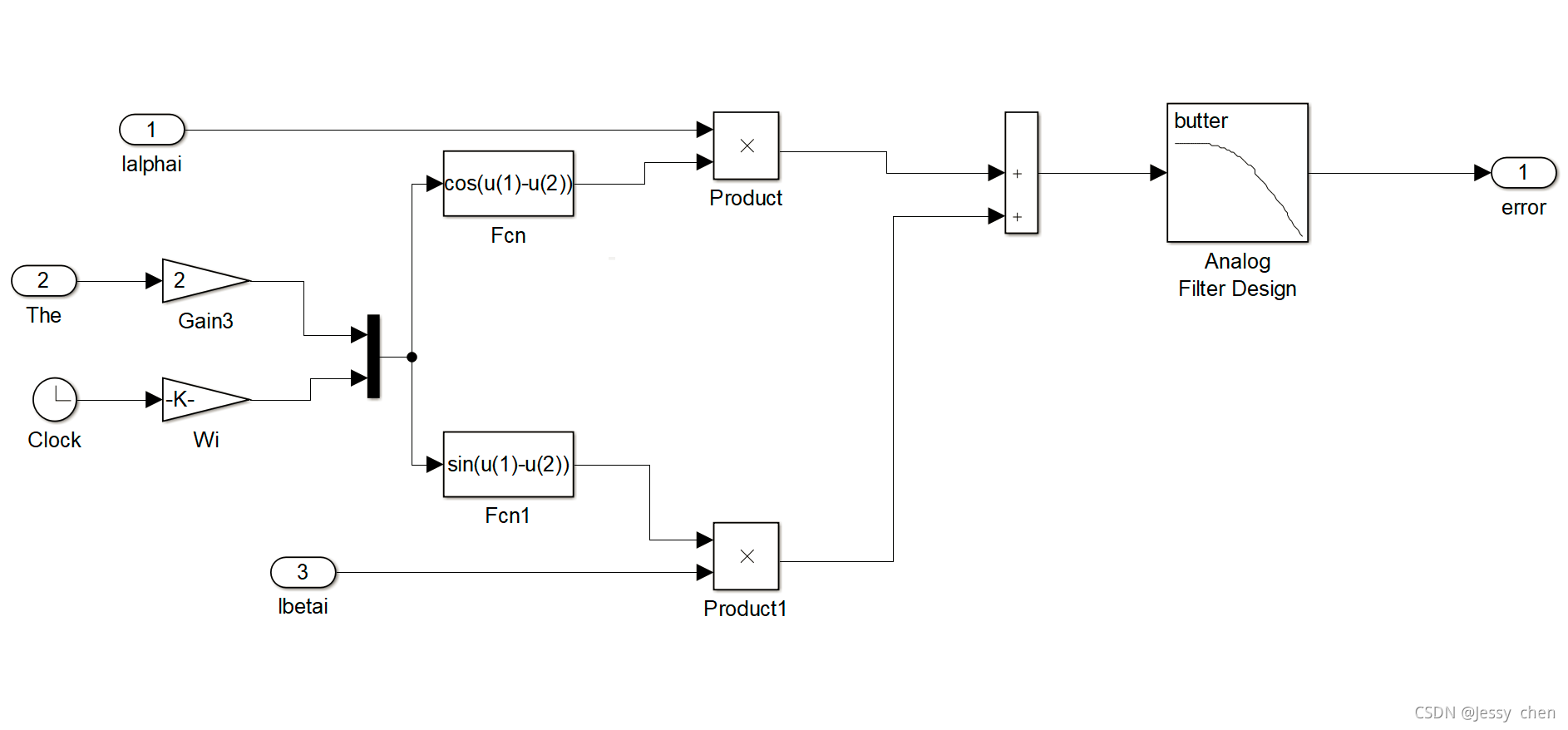 其中
其中
2.7、观测器模块(observer)
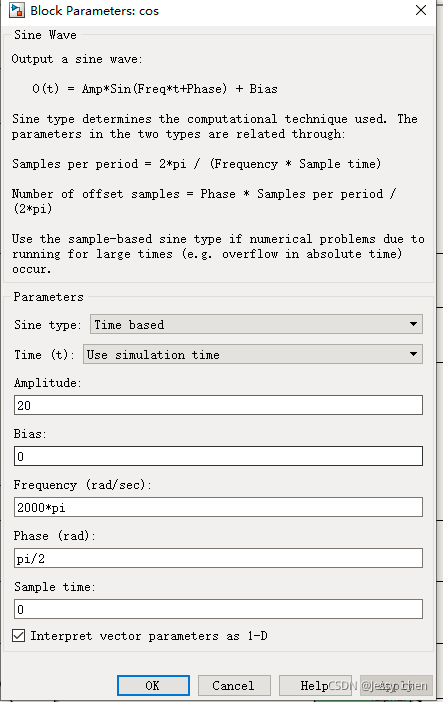
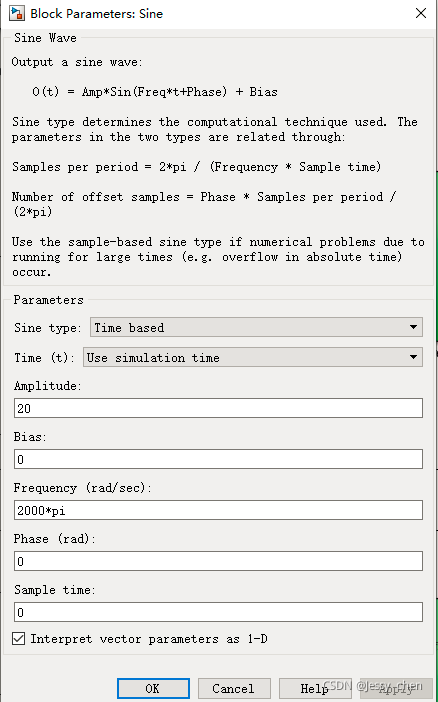
2.8、注入的高频电压模块
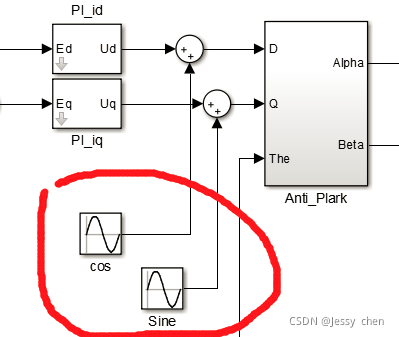
其中一个是sin,另一个是cos
cos参数:
sin参数:
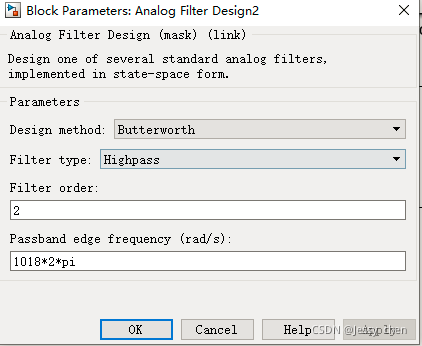
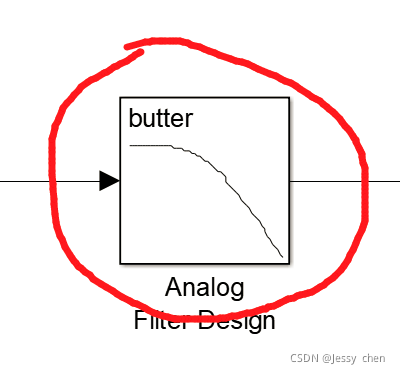
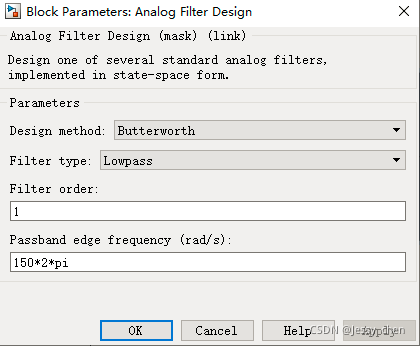
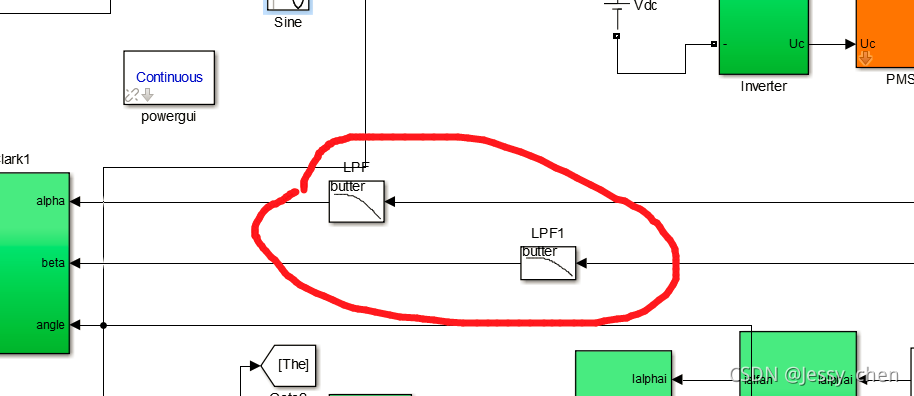
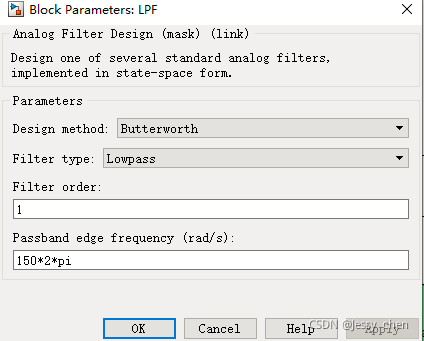
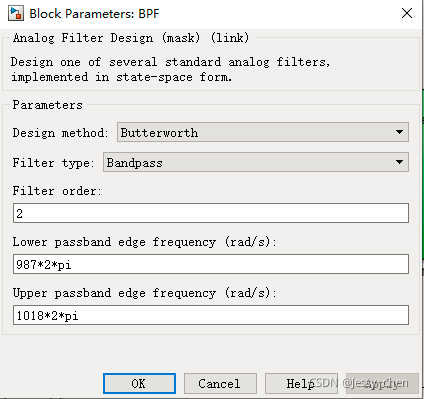
2.9、框图的滤波器参数
三、仿真波形图
3.1、转速误差图
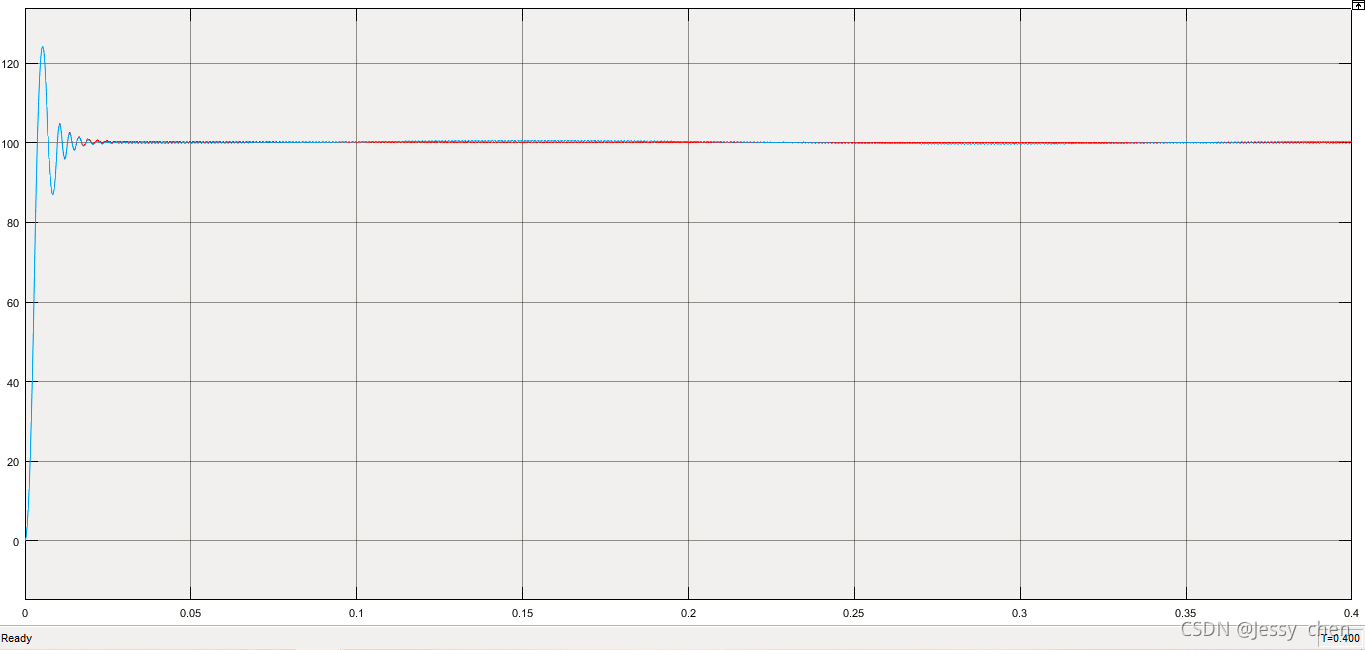
3.2、实际转速与估计转速
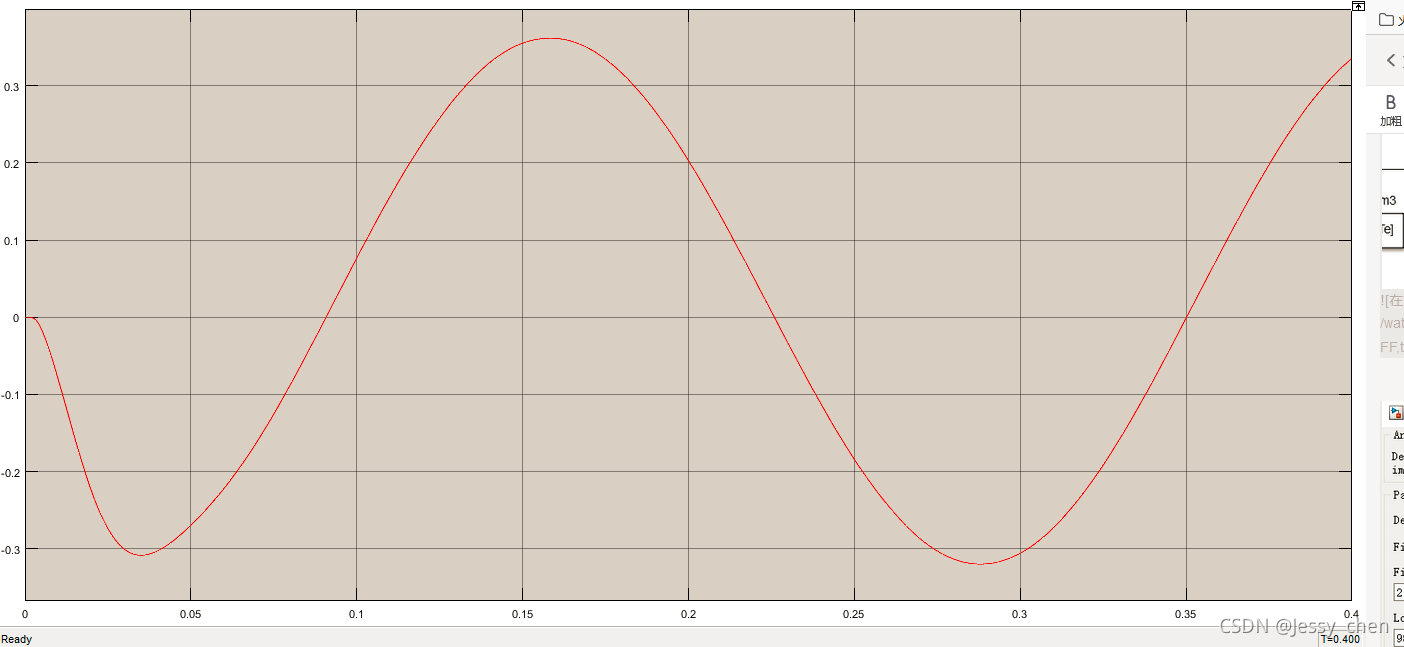
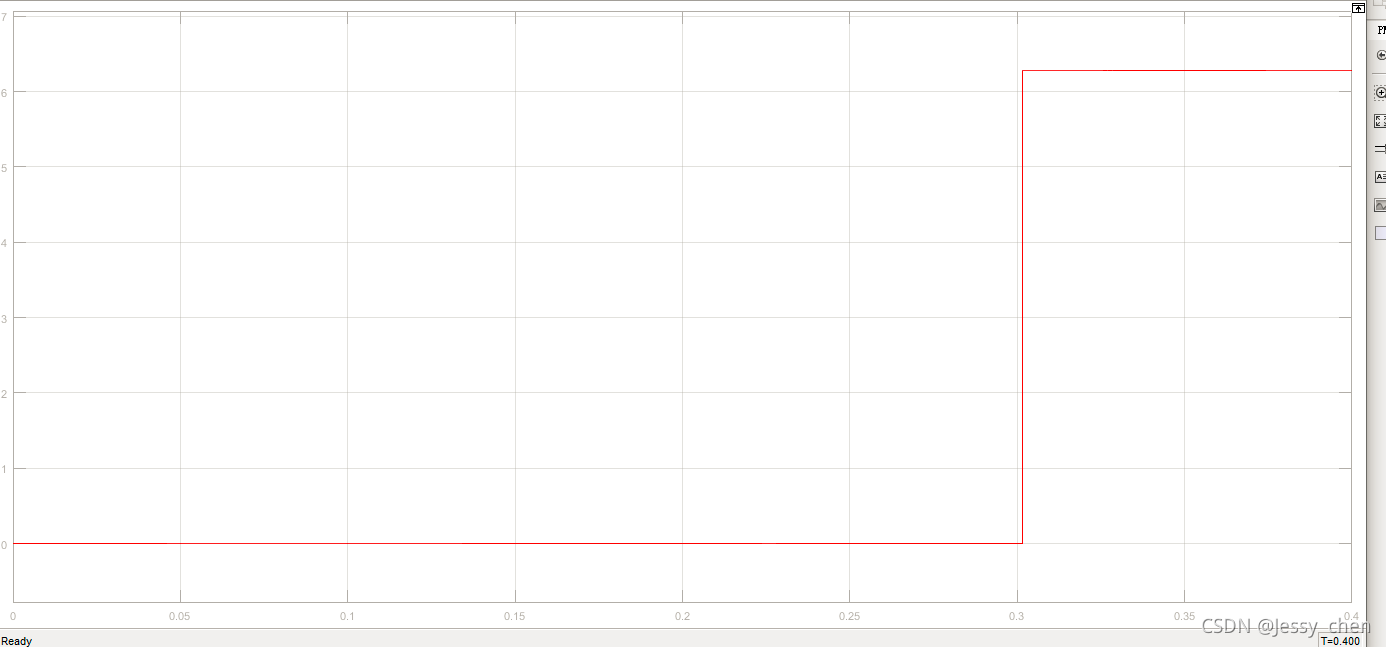
3.3、转子误差
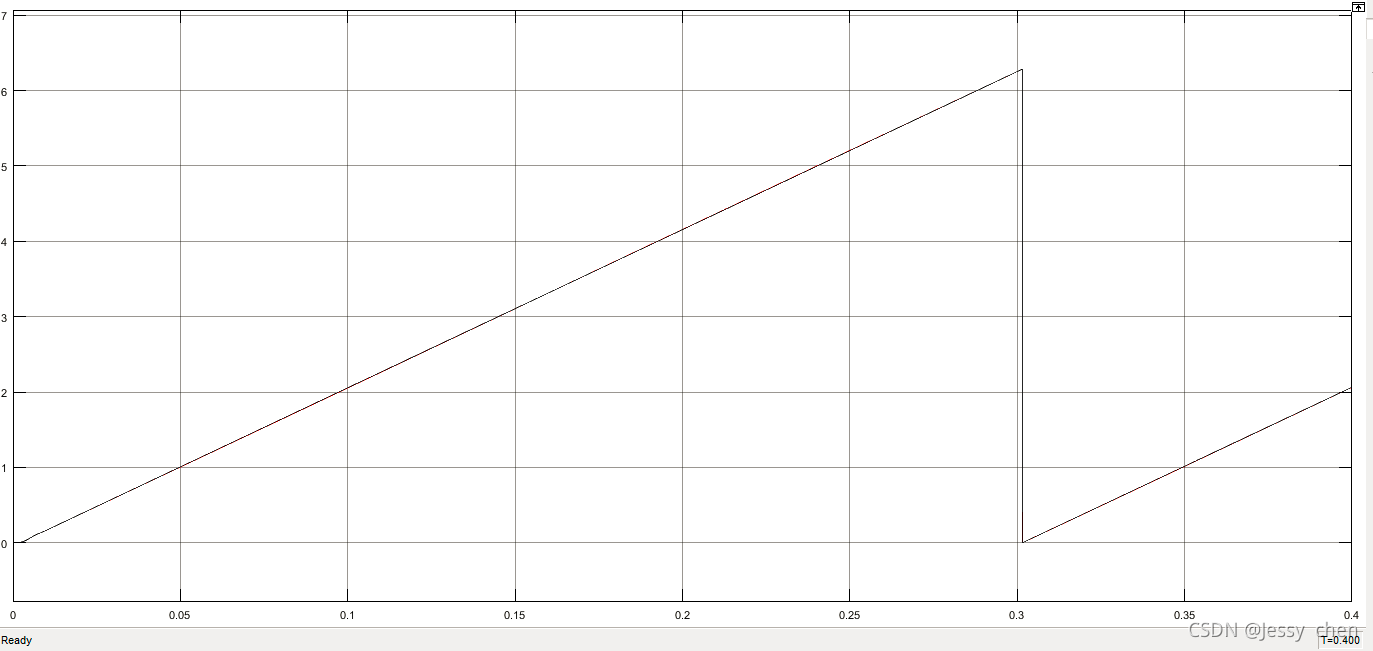
3.4、实际转子与估计转子
四、总结
总体来说还是不错,但是误差相对来说还是挺大的。
文章出处登录后可见!