一、ROS简介
ROS是Robot Operating System的缩写,原本是斯坦福大学的一个机器人项目,后来由Willow Garage公司发展,目前由OSRF(Open Source Robotics Foundation, Inc)公司维护的开源项目。ROS就像手机界的安卓,电脑中的微软;ROS虽然叫操作系统,但是真正底层的任务调度、编译、寻址等任务还是由Linux操作系统完成,也就是ROS充其量是一个运行在Linux上的次级操作系统。
可以看某公司对ROS机器人算法工程师的要求:
(1)有机器人导航算法工作经验
(2)熟练掌握Slam机器人导航,实现建图、定位等功能;
(3)熟练使用ROS框架操控;
(4)熟练Linux系统、python和C++;
(5)扎实的数学功底。
ROS是一个操作系统
根据wikipedia定义,OS is system software that manages computer hardware and software resources and provides common services for computer programs。
- 计算机的操作系统封装了计算机硬件,应用软件运行在操作系统之上,而不管计算机具体应用于何种硬件产品。这样可以大大提高软件开发的效率(不然大家只能写汇编)。
- 同理,ROS则是对机器人的硬件进行了封装,不同的机器人、不同的传感器,在ROS里可以用相同的方式表示(topic等),供上层应用程序(运动规划等)调用。
学习路径
ROS主要编程语言是C++和python。
(1)ROS官方文档:http://wiki.ros.org/ROS/Tutorials
(2)中文版ROS教程:http://wiki.ros.org/cn/ROS/Tutorials(初级学前20讲)
(3)大佬的ROS学习笔记
(4)中科院ROS入门课程
(5)补充中。
三、ROS的核心概念
3.1 ROS是一种跨平台模块化软件通讯机制
ROS用节点(Node)的概念表示一个应用程序,不同node之间通过事先定义好格式的消息(Topic),服务(Service),动作(Action)来实现连接。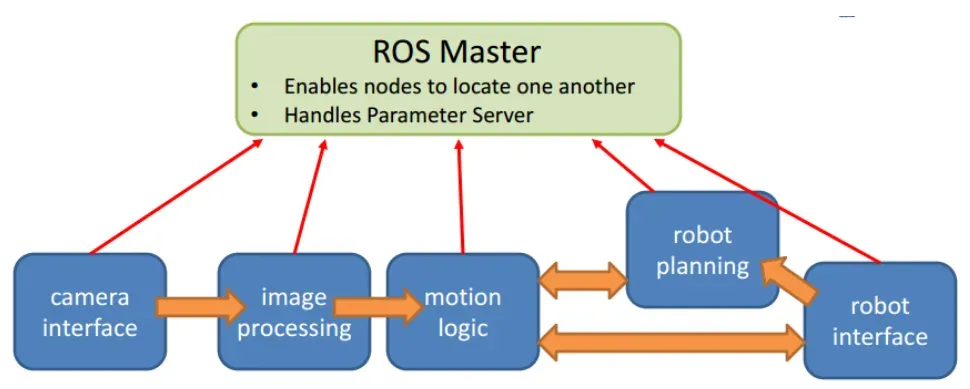
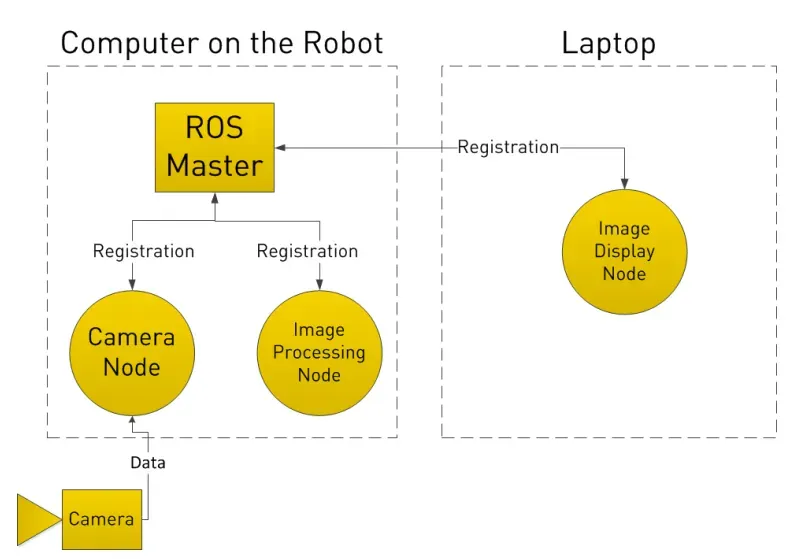
(1)节点Node——执行单元
- 执行特定任务的进程,独立运行的可执行文件;
- 不同的节点可以使用不同的编程语言,可以分布在不同的主机上;
- 节点名称在系统中必须唯一
(2)节点管理器 (ROS Master)—— 控制中心
- 为节点提供命名和注册服务;
- 跟踪和记录话题/服务通信,辅助节点相互查找、建立连接;
- 提供参数服务器,节点用于在运行时存储和检索参数。
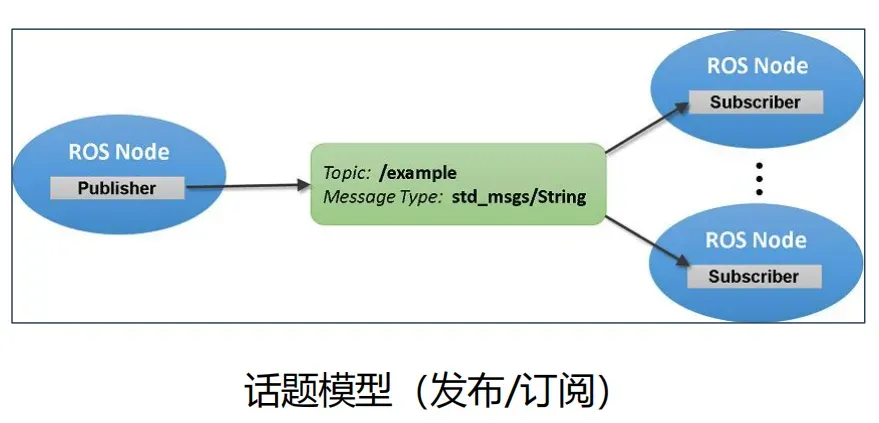
3.2 话题通信
- 话题(Topic)—— 异步通信机制
- 用于在节点之间传输数据的重要总线;
- 使用发布/订阅模型,数据由发布者传输到订阅者,同一个话题的订阅者或发布者可以不唯一。
- 消息(Message)—— 话题数据
- 具有一定的类型和数据结构,包括ROS提供的标准类型和用户自定义类型;
- 使用编程语言无关的.msg文件定义,编译过程中生成对应的代码文件。
3.2 服务通信
服务(Service)—— 同步通信机制
- 使用客户端/服务器(C/S)模型,客户端发送请求数据,服务器完成处理后返回应答数据;
- 使用编程语言无关的.srv文件定义请求和应答数据结构,编译过程中生成对应的代码文件。
3.3 文件系统
- 功能包(Package) :ROS软件中的基本单元,包含节点源码、配置文件、数据定义等
- 功能包清单(Package manifest):记录功能包的基本信息,包含作者信息、许可信息、依赖选项、编译标志等
- 元功能包(Meta Packages):组织多个用于同一目的功能包
Reference
[1] https://www.cnblogs.com/qqfly/p/5851382.html
[2] ROS入门:https://zhuanlan.zhihu.com/p/26007106
版权声明:本文为博主山顶夕景原创文章,版权归属原作者,如果侵权,请联系我们删除!
原文链接:https://blog.csdn.net/qq_35812205/article/details/123053556